Professional Documents
Culture Documents
A Real-Time
Uploaded by
Daniela GonzalezOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
A Real-Time
Uploaded by
Daniela GonzalezCopyright:
Available Formats
2680
IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 8, AUG. 2015
A Real-Time Multispectral Computer Vision
System for Morpho-Thermal Analysis of
Footprint Plantar
C. D. Ferrin and H. Loaiza
1
Abstract Physical Rehabilitation for the victims of
Colombias military conflict and other Latin America countries
will require new non-invasive tools for rapid assessment. In this
respect, technological developments in the area of podiatric
assessments are very poor. In many cases podiatrists support
morphological and thermal assessment on visual evaluation aimed
at determining both, feet condition and related pathologies. In this
work, we use computer vision techniques to build a computeraided system for obtaining morphological and thermal parameters
of footprint plantar by means of RGB and infrared images,
respectively. In practice, our design shown to be a user-friendly
and flexible non-invasive system. In the tests we made our
development allows experts and novices obtaining and visualizing
such parameters faster than common methods. Both, diabetic
patients and controls were analyzed to conclude that fusion of
morphological and thermal information is a promising tool for
preventing ulceration in diabetic foot.
Keywords Podology, Podoscopies,
Computer Vision, Visualization.
Termopedographies,
I. INTRODUCCIN
L ACESSO a ms y mejores herramientas para los
procesos de rehabilitacin fsica a las vctimas del postconflicto es una de las banderas del actual gobierno
Colombiano [1]. La rehabilitacin fsica [2] es un proceso
clave en la recuperacin de vctimas con problemas del
sistema locomotor, y en este sentido no todas las clnicas, ni
centros de rehabilitacin cuentan con herramientas apropiadas,
objetivas y que estn a la altura de tales polticas
gubernamentales. Lo anterior se debe a que muchos
procedimientos todava siguen siendo llevados a cabo de
forma subjetiva y la tecnologa extranjera es muy costosa para
economas como la nuestra.
Uno de los tantos estudios necesarios en los procesos de
rehabilitacin conocido como anlisis morfo-trmico de la
huella plantar no se escapa de la situacin mencionada
anteriormente. El objetivo primordial de este tipo de estudio es
obtener mtricas a partir de imgenes de la zona de contacto y
la distribucin de temperaturas de la huella plantar que
informan de la condiciones biomecnica y clnica de los
pacientes [3], [4], [5]. Estas mtricas colaboran en procesos de
diagnstico y rutas de recuperacin por parte del especialista.
C. D. Ferrin Bolaos, Programa de Posgrados en Ingeniera Elctrica y
Electrnica, Facultad de Ingeniera, Universidad del Valle, Cali, Colombia,
carlos.ferrin@correounivalle.edu.co
H. Loaiza, Escuela de Ingeniera Elctrica y Electrnica, Facultad de
Ingeniera,
Universidad
del
Valle,
Cali,
Colombia,
humberto.loaiza@correounivalle.edu.co
El anlisis morfolgico de la huella plantar [4], [5], [6]
consiste en que a partir de una imagen representativa de la
zona de contacto se establecen algunos puntos caractersticos
ubicados en extremos del contorno de la huella y siguiendo
una secuencia de pasos se trazan lneas que permiten
establecer estos parmetros. El propsito fundamental es
poder categorizar el pie en plano, normal o cavo [4]. Entre los
parmetros morfolgicos propuestos para tal propsito se
encuentra en el ngulo de Clarke, ndice Hernndez-Corvo,
ndice de Staheli, ndice de Chippaux [5], [6], [7], [8], [9]. En
la Tabla I se resumen estos parmetros. En [4], [10], [11] se
puede ver una descripcin ms detallada de los mismos.
Por su parte el anlisis trmico del pie consiste en encontrar
valores representativos de temperatura de la distribucin
trmica de la huella plantar de forma estadstica [12], en
regiones caractersticas dentro de la huella [3], [13] y
diferencias trmicas puntuales entre el pie izquierdo y derecho
[12], [14] bajo la asuncin que estos son idnticos.
La fusin de la informacin que provee las Tablas I y II
tiene un poder anlisis incremental en procesos de evaluacin
podolgica, por ejemplo, en victimas del post-conflicto con
problemas de pie diabtico. La aparicin de lceras plantares
es un gran reto dentro del mbito clnico y su deteccin
temprana es crucial para tomar medidas temporales en los
pacientes. El anlisis trmico alerta sobre la susceptibilidad a
padecer la condicin clnica mostrada en la Tabla II y el
morfolgico brinda un mapa espacial claro en qu zona del pie
dicha condicin se podra agudizar.
La forma ms econmica, para llevar a cabo el anlisis
morfolgico, (aun utilizada) en muchos centros deportivos y
clnicas a nivel mundial es mediante la impregnacin de tinta
en la huella plantar y su posterior registro sobre papel. Sin
embargo el estudio debe realizarse con mucho cuidado dado
que deben identificarse puntos extremos y algunas distancias
ptimas para poder calcular los diferentes ndices
morfolgicos (ver Tabla I.). Una persona experta puede tardar
alrededor de diez minutos extrayendo los parmetros
morfolgicos y una persona no experta algo ms de una hora
[11].
Una evolucin natural al mtodo anterior es tomar una
fotografa del papel sobre la que se encuentra ya impregnada
la huella y su posterior estudio digital. Un sistema como el
concebido anteriormente se reporta en [15] conocido como
PODOEST-DINA, el cual constituye un desarrollo a nivel
Nacional por parte del Instituto de Investigaciones y
Soluciones Biomecnica del Dr. Jos Acero. Aun cuando el
proceso de extraccin de parmetros ha sido sistematizado, se
necesita que una persona experta opere el sistema. En [10]
desarrollan una metodologa que permite obtener el ndice de
Hernndez-Corvo de forma asistida, a partir de imgenes
FERRIN AND LOAIZA : A REAL-TIME MULTISPECTRAL COMPUTER VISION
caapturadas con
n un podosco
opio, sin embargo el proceeso de
deeteccin de pu
untos sigue sieendo una tareaa subjetiva.
T
TABLA I. RESUM
MEN DE LOS PA
ARMETROS MORFOLGICOS
M
S Y SU
RESPECTIVA INTERPRETACIIN.
Parmetro
os
Morfolgicco
ngulo de Cllarke
().
ndice dee
Hernndez-Co
orvo,
IHC, (%).
ndice de Staaheli
(%).
ndice dee
Chippaux (%
%).
Pie Plano
ormal
Pie No
Pie C
Cavo
3
31
> 31 - 45
> 45
3
34
> 34 - 59
> 59
7
70
< 70 - 60
< 60
4
45
< 45 - 25
< 25
TABLA II. RE
ESUMEN DE LAS PARMETRO
OS TRMICOS Y SU
RESPECTIVA INTERPRETACIIN.
Parmetrros
Trmico
os
Temperatura Media
del Pie,
Estadstica d
Tmedia, (C
C).
Temperatura Media
n [3]),
del Pie (seg
MFT, (C
C).
Imagen de
d
Diferencia Trmica
Absoluta, IDTT, entre
el pie izquieerdo y
derecho
o.
Relacin Clnica
Inccrementos repeentinos superiiores
a 10 C est asociado con
prob
blemas de circculacin sangu
unea
en cualquier tipo
o de paciente [[12].
E
En pacientes ccon pie diabtico
grad
do cero, tempeeraturas superriores
a 33 C, est asociada con
n
neuropata d
diabtica [3].
E
En pacientes ccon pie diabtico
graado cero, aqueellos puntos do
onde
laa diferencia es superior a 2.2
2 C
ind
dica posible ap
paricin de lccera
plantar [[12], [14].
Uno de los sistemas ms utilizados a nivel mund
dial es
Fo
ootScanTM dee RSCan Inteernational [16
6]. El sistem
ma est
prrincipalmente concebido para anlisiss dinmico de la
diistribucin dee presionas p
plantares con
n la posibilid
dad de
ob
btener alguno
os parmetro
os morfolgiccos tales com
mo la
lo
ongitud del piie, el ancho del taln y eel antepi, tod
dos de
fo
orma asistida. FOOTQUES
ST [17] permitte obtener de forma
au
utomtica el taamao y tipo de calzado m
mediante el uso
o de un
esscner, sin em
mbargo esta op
pcin no inten
nta la generaccin de
n
ndices como lo
os mencionado
os en la Tabla I.
la aplicaci
En
[18] se reporta
n de tcniccas de
seegmentacin y clasificacin
n para determin
nar el tipo de pie de
fo
orma automtiica, sin embarrgo el poder d
de generalizaccin de
laa mquina de aaprendizaje no
o se estudia, n
necesitndose etapas
po
osteriores parra evaluar la metodologa con un grup
po ms
grrande imgenees diferentes a las de entren
namiento. Adeems el
tip
po de huellass que trabajan
n son ideales, es decir la huella
siiempre aparecce bien definid
da en contacto
o, no contemp
plando
siituaciones en lla que por ejem
mplo el medio
opi no contactte bien
co
on la superficiie de registro.
Por su partee, la extracci
n de parmeetros trmicoss de la
hu
uella plantar, a partir de im
mgenes infraarrojas, ha sid
do muy
po
oco estudiada.. Aun cuando en [3], [12], [[13], [14] estaablecen
2681
los procesos de extraccin dee los parmettros trmicos (ver
Tabla II.) a partir termografas,, las metodolo
ogas desarrolladas
son manuales y en
n el mejor de llos casos utilizzando softwarre de
proccesamiento geenrico de imgenes como Paint
P
(Microssoft),
GIM
MP, o inclusiv
ve el mismo ssoftware de lo
os proveedorees de
cm
maras infrarrojas, etc. Este proceso pued
de tardar un p
poco
mss que para el caso
c
morfolg
gico, dado quee deben obten
nerse
estaadsticas sobree regiones las cuales deeben identificcarse
adeccuadamente.
E [12], [14] sse reporta unaa metodologaa automtica para
En
anllisis asimtricco de la distribucin trmiica de las hueellas
plan
ntares. Sin du
uda este trabajjo es un referrente para estte la
prop
puesta aqu deescrita, dado que
q la metodologa desarrolllada
iden
ntifica adecuad
damente tcnicas de procesaamiento imgenes
paraa lograr su com
metido. Sin em
mbargo, esta metodologa debe
d
com
mplementarse con las tcniccas necesariass para analizaar la
distrribucin de teemperatura en
n la huella plaantar en los ccasos
cuan
ndo solo se d
dispone de un
n pie (por ejem
mplo en perso
onas
con amputacin d
de uno de sus eextremidades iinferiores).
E sntesis aun
En
n cuando la inv
vestigacin y desarrollo a n
nivel
mun
ndial ha perm
mitido un gran
n avance en lo
os dispositivo
os de
form
macin de imgenes y las capacidades co
omputacionalees de
los actuales com
mputadores p
personales no
o se ha logrado
omatizar y sisstematizar los procesos de extraccin dee los
auto
parmetros morfo
o-trmicos de la huella plan
ntar. Por tal raazn
en eeste trabajo se plantea la sigu
uiente cuestin
n: Cules son
n los
prottocolos de caaptura y las tcnicas de procesamiento
p
o de
img
genes que perrmiten hacer m
ms objetivo y rpido el anlisis
morrfo-trmico de la huella plan
ntar?
II. METOD
DOLOGA
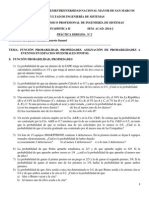
E
En la Fig. 1 se puede ver llas tcnicas prropuestas, en este
trabajo, para llev
var a cabo ell anlisis morfo-trmico d
de la
huellla plantar.
Figurra 1. Diagrama d
de bloques simpliificado de las tccnicas propuestass para
llevaar a cabo el anlissis morfo-trmico
o a partir de img
genes RGB e IR de la
huellla plantar. Fuente propia.
L
Las etapas de procesamiento
p
o y anlisis dee imgenes RG
GB e
IR rrequieren por un lado una zzona de contacctado fuertem
mente
conttrastada con reespecto al fon
ndo y para esto
o se obtiene laa as
cono
ocida Podosccopa de la huella; y po
or otro lado una
distrribucin de temperaturas con adecuad
da resolucin
n (
320x
x240) la cual se puede obttener con ayud
da de una imaagen
infraarroja en un esquema de ccaptura pasivaa [19], [20]. Para
2682
IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 8, AUG. 2015
to
odos los casoss las capturas se realizan ssiguiendo prottocolos
biiomecnicos [4
4], [6] y clniccos [12].
A. Podoscopa
pa es una tcnica no inv
vasiva que p
permite
La Podoscop
btener una zon
na de contacto
o realzada en el color que p
provee
ob
un
n sistema de iiluminacin ccontrolado, en
n este caso meediante
lmparas verdees ubicadas en
n los costado
os de una sup
perficie
transparente (een el espectro
o visible [21]) con un nd
dice de
reefraccin [22] mayor a la d
del ambiente, ver Fig. 2(a).. En la
Fiig. 2(b) se pueede ver una veersin del pro
ototipo en 3D el cual
in
ncluye adems una platafforma compu
utacional totallmente
em
mbebida y eempotrada en el sistema para la capttura y
po
osterior anlisis de la pod
doscopa. Y en la Fig. 2(c)
2
se
ob
bservan cuatrro podoscopaas de pacien
ntes de prueb
ba que
co
orresponde a imgenes RGB
B de 8 bits y 640x480 de tam
mao.
uorescentes dee 30W,
Para este casso se utilizan lmparas flu
tip
po cilndricass, una superrficie rectangu
ular (60x50cm
m) de
viidrio crudo dee 19 mm de espesor. Se u
utilizan en tottal dos
lmparas, una een cada uno dee los costados ms pequeo
os de la
su
uperficie. Se u
utiliza una cm
mara webcam Logitech C92
20 [23]
po
or sus caracctersticas dee correccin de distorsi
n de
im
mgenes, y se ubica a una alltura adecuadaa de tal forma que la
im
magen se encu
uentre enfocad
da, bien encuad
drada y que su
u plano
im
magen y la sup
perficie de apo
oyo sean parallelas. Se sugieere que
en
n futuras inveestigaciones se
s utilice un sistema de ccontrol
viisual [24], [25], [26], [2
27] para quee este proceeso de
po
osicionamientto y orientaci
n de la cmaara sea realizaado de
fo
orma automtiica y rpida.
El pie del paciente deb
be limpiarse con alcoholl y la
su
uperficie de ap
poyo debe lim
mpiarse para cada
c
paciente. Debe
teenerse especial cuidado con
n aquellos paciientes que preesentan
fu
uertes callosid
dades u otro ttipo de rugosiidades pronun
nciadas
so
obre la superfi
ficie de la bveeda plantar daado que en estte caso
ess posible no ob
btener una adeecuada zona d
de contacto.
a)
b)
meto
odologa: segm
mentacin bassada en color [31] (SBC) (1
1), el
prop
psito de esta etapa es la dee separar las h
huellas del fondo,
elim
minando cualq
quier presenciaa de falsos po
ositivos. Unaa vez
segm
mentadas las huellas, se pasa al bloquee de deteccin
n de
piess (2), el cual id
dentifica el tip
po de pie (Izqu
uierdo o Derecho)
y geenera subimg
genes que con
ntienen de form
ma separada ccada
huellla. Luego se pasa
p
a una etaapa de alineam
miento rgido [32],
[
[33]] (3) que corregir la orientacin de la hu
uella.
Postteriormente, la etapa de deeteccin de bordes (4) perrmite
obteener los pixelees frontera de la huella, estaa informacin va a
un mdulo clav
ve: obtencin
n de puntos (5); este lttimo
ntifica automticamente lo
os puntos neccesarios sobrre la
iden
huellla que permittirn realizar d
de forma auto
omtica el trazzado
de las diferentees lneas req
querida antes de calcular los
folgicos. La informacin generada en
n los
parmetros morfo
bloq
ques 3, 4 y 5 alimenta de forma distintta los mdulos de
extrraccin de p
parmetros m
morfolgicos (6). Para mayor
m
info
ormacin se recomienda el trrabajo publicaado en [34].
(a)
c)
Fiigura 2. Esquem
ma de funcionam
miento simplificad
do de la Podosccopa a),
prrototipo 3D d
del sistema adquisicin co
on sistema em
mbebido
BeeagleBoneBlack [28] b) y podoscopas de algun
nos pacientes c).. Fuente
prropia.
B. Sistema de P
Procesamiento
o y Anlisis dee Imgenes RG
GB
En la Fig. 3((a) se puede observar de forrma esquemattica los
paarmetros dee entrada q
que requieree el sistem
ma de
prrocesmaiento y anlisis de imgenes RG
GB para obteener en
esste caso los parmetros
p
mo
orfolgicos. Y en la Fig. 3
3(b) se
m
muestra detalladamente las d
diferentes etapas de procesam
miento
y anlisis, neecesarios parra sistematizzar el proceso de
xtraccin de eestos parmetrros. El sistem
ma puede trabaajar en
ex
m
modo semiauto
omtico ( estaa versin se public en [11]) y
fo
orma automtiica (esta versi
n se public en
e [29]).
A continuaciin se describee de forma sin
ntetizada cada una de
lo
os bloques d
de la Fig. 3((b): la podosscopa (Imag
gen de
En
ntrada), el tipo
o y tamao deel filtro morfo
olgico (en estte caso
see propone un elemento estrructurante circcular de 5x5 y radio
2)) [30] y el vaalor umbral aliimentan el prrimer bloque d
de esta
(b)
Figurra 3. Esquema de funcionamieento del sistemaa de procesamien
nto y
anlisis de imgenes R
RGB para el caso morfolgico a), y descripcin detaallada
os diferentes tcnicas utilizadas en la implemen
ntacin del mism
mo b).
de lo
Fuen
nte propia.
Captura de Im
magen Infrarro
oja de la Huella Plantar
C. C
Se utiliza un eesquema pasiv
vo [20] para captura
c
de imaagen
infraarroja de la bveda plan
ntar en la dissposicin quee se
mueestra en la Fig
g. 4(a). Para laa captura de lla imagen anteerior
se u
utiliza una cmara FLIR E
E320 [35] (veer Fig. 4(b)) con
tamaao de capturra 720x480, u
un solo canall y una paletaa en
escaala de grises d
de 8 bits; pued
den verse algu
unas capturas een la
Fig. 4(c). Y con ayuda de un material opacco en infrarrojjo se
FERRIN AND LOAIZA : A REAL-TIME MULTISPECTRAL COMPUTER VISION
ev
vita la presen
ncia de fuentes parsitas prrovenientes dee otras
paartes del cuerp
po.
La cmara d
debe ubicarse a una distan
ncia adecuada de tal
fo
orma que el en
ncuadre de la imagen se ap
proveche al mximo.
La distancia pro
omedio de cap
ptura en este ttrabajo fue de 1.1 m.
n caso de ser necesario deb
be moverse el foco de la cm
mara a
En
fin
n de obtener una imagen n
ntida. Se sug
giere que en ffuturas
in
nvestigacioness se desarrollle un esquem
ma de capturra ms
co
ontrolado a ffin de tener imgenes co
on condicionees ms
siimilares. La reelacin nivel d
de gris de la imagen
i
versuss valor
dee temperatura es diferente para cada imaagen, dado qu
ue este
tip
po de cmaraas tienden a variar el ran
ngo de temperraturas
m
medible y adem
ms no siemp
pre los nivelees de gris 0 y 255
co
orresponden a los valores mnimoss y mximo
os de
teemperatura. Co
on ayuda de u
un perfil de lnea sobre la paaleta de
grris se pudo deeterminar quee el valor mn
nimo de tempeeratura
siiempre estaba asociado al n
nivel de gris 36
6 y el valor m
mximo
dee temperaturaa con el nivell 250. A parttir de lo anterrior se
co
onstruye una rrelacin lineal entre el nivel de gris y el vaalor de
teemperatura en la imagen quee depende del rango dinmiico que
im
mponga el disp
positivo a cadaa imagen en particular.
2683
alineear (3) cada huella, cadaa una de fo
orma separadaa es
registrada no rgid
damente [32] ((4) junto con un
u modelo bin
nario
de la huella plaantar. La transsformacin ptima
(Imaagen mvil) d
obteenida permite alinear, no rrgidamente ((5), el modelo
o de
caraactersticas, el cual permitirr detectar las regiones sobrre la
imag
gen de entraada (6). Fin
nalmente, con
n ayuda de una
temp
peratura de rreferencia (en
n [3] se sugiiere que esta sea
obteenida median
nte termograffa de la m
mano) se exttraen
finalmente los paarmetros trm
micos (7). Dado que la cm
mara
FLIR
R E320 estaablece el rang
go de temperraturas de fo
orma
auto
omtica (indiccado en la imaagen), se desaarrolla una tccnica
de reconocimien
nto ptico dee caracteres para
p
extraer esta
info
ormacin a parrtir de la mism
ma imagen de forma automtica
en eel bloque (6). Para mayor in
nformacin see remite al traabajo
publlicado en [34].
(a)
a)
b
b)
c)
Fiigura 4. Esquem
ma de funcionamieento simplificado
o de la captura pasiva de
im
magen infrarroja de
d la bveda planttar a), vista real d
del proceso de adq
quisicin
b) y termografas d
de algunos pacienttes c). Fuente prop
pia.
de anticipacin
n a fin
Debe preparaarse al pacientte con un da d
qu
ue se cumpla todos
t
los proto
ocolos clnicos necesarios p
para
ob
btener una adeecuada termog
grafa del pacieente. En [12] sse
pu
uede tener unaa descripcin ms
m completa del protocolo
o para
esste caso.
D
D. Sistema de P
Procesamiento
o y Anlisis dee Imgenes
In
nfrarroja
En la Fig. 5(a) se puede de ver de forrma esquemtiica los
paarmetros de eentrada y salid
da del sistemaa de procesamiiento y
an
nlisis de img
genes para estte caso. Los paarmetros de eentrada
dee arriba hacia abajo en el lad
do izquierdo d
de esta mismaa figura
so
on: la imagen
n infrarroja, ell modelo binaario de la hueella, el
m
modelo binariio de caracttersticas y la temperatu
ura de
reeferencia (estaa se puede o
obtener mediiante procesam
miento
diigital de la imaagen de la term
mografa de laa mano).
A continuaciin se describee de forma sin
ntetizada cada una de
lo
os bloques dee la Fig. 5(b
b): en la prim
mera etapa d
de este
allgoritmo se define la ROI (Regin de IInters Reg
gion Of
In
nterest) (en esste caso se fiij un rectng
gulo centrado, igual
an
ncho y 20% d
de la altura de la imagen infr
frarroja) y el n
nmero
dee iteraciones (de forma heurstica se fij en 300
0) que
ejjecutar la tccnica de segm
mentacin (1) m
mediante niveeles de
onjunto [36], [37] (SBNC
C). Las huellaas segmentadaas son
co
seeparadas mediiante un detecctor de pies (2
2) y el tipo d
de cada
un
no tambin es identificado ((Izquierdo o d
derecho). Desp
pus de
(b)
Figurra 5. Esquema de funcionamieento del sistemaa de procesamien
nto y
anlisis de imgenes IIR para el caso trmico a), y descripcin detallada de
d los
mplementacin d
del mismo b). F
Fuente
difereentes tcnicas uttilizadas en la im
propiia.
III. CASO D
DE ESTUDIO
pruebas de validacin con
Se realizaron diferentes p
g. 6) desarrolllada
espeecialistas. La herramienta software (Fig
mosstr ser confiiable y rpidaa en los procesos de anlisis
morrfo-trmico dee la huella p
plantar. En [1
11], [29], [34
4] se
pued
den ver algun
nas publicaciones respecto a lo anterior y en
2684
IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 8, AUG. 2015
[3
38] se puede ver
v un vdeo del funcionam
miento generaal de la
heerramienta harrdware-softwaare desarrollad
da en esta prop
puesta.
En esta oporrtunidad se utiiliz la herram
mienta para estudiar
laas diferencias morfo-trmiccas entre pacieentes diabticcos (un
to
otal de 7) y no
o diabticos (u
un total de 10
0). En la Fig. 7(a)
7
se
m
muestran las po
odoscopas de los 7 pacientees diabticos y en la
Fiig. 7(b) su corrrespondientess termografas.
En la Fig. 8
8(a) y (b) se ttienen las corrrespondientess a los
paacientes sin co
ondicin diabtica. En la Taabla IV y en laa Fig. 9
see recogen lass caractersticcas macroantrropomtricas de los
paacientes y ell estado nutrricional de ccada uno seg
gn la
O
Organizacin Mundial d
de la Sallud, OMS [39],
reespectivamentee.
Se puede verr a partir de las Fig. 7 y 8 que el protoccolo de
caaptura para po
odoscopas perrmite obtener una imagen con
c un
fo
ondo (lo que no se consiidera como p
parte del pie) muy
ho
omogneo en todos los caso
os. Sin embarrgo no puede d
decirse
lo
o mismo de las termogrrafas; aun as el sistem
ma de
prrocesamiento y anlisis trm
mico pudo pro
ocesar exitosaamente
esstas imgenes..
Para comparar las medias dee las diferenciias del MFT eentre
amb
bos pies para el caso de los pacientes diiabticos y los no
diab
bticos se lleva a cabo un teest de hiptesiis estadstico [12],
[
[40]] de muestras independienttes con ayudaa de la prueb
ba tStud
dent y un niv
vel de significcacin de 0.05. La Tablaa III
mueestra los resulttados.
A partir de essta tabla se puede
p
inferir que no se pu
uede
conssiderar que haayan diferenciias significativ
vas de las meedias
de laas diferencias del MFT (p > 0.05) de am
mbos pies entree los
paciientes diabticcos y los no d
diabticos. Sin
n embargo a p
partir
de lla Fig. 10 se puede observ
var que los p
pacientes P2 y P7
pressentan diferenccias del MFT de hasta 4 C..
TA
ABLA III. RESUL
LTADOS DE TE
EST DE HIPTES
SIS ESTADSTIC
CO
PARA DIFE
ERENCIAS ENT
TRE MFT DE AM
MBOS PIES.
D
DIAB.
Meedia
de
Diferencias
FT(C)
MF
Deesviacin
Estndar (C)
Vaalor del Test
Estadstico
Grrados
de
Lib
bertad
del
Teest
Vaalor p
N
NO DIAB.
0.0272
-0.0584
2.2337
0.1672
R
RESULTADO
OS
0.1225
15
0.9042
E trminos m
En
morfolgicos (v
ver Fig. 11) eel tipo de pie y la
diferencia IHC no es caractterstico del tipo de paciiente
e el tipo dee pie
pudiindose preseentar cualquieer condicin en
indeependientemen
nte de presentaar condicin diabtica
d
o no..
Fiigura 6. Interfaz G
Grfica de Usuariio para anlisis m
morfo-trmico de lla huella
plantar. 1) Ventanaa principal de reg
gistro e ingreso dee usuario a base de datos
t
perssonales, 2) resultaado de anlisis trmico y
dee podoscopas y termografas
3) resultado de an
nlisis morfolgicco. En [38] se pu
uede ver en detaalle y en
fu
uncionamiento de este aplicativo y sus mdulos. Fueente propia.
a)
b)
Figurra 8. Podoscopaas a) y termografas b) pacientes siin condicin diab
btica,
P8 a P17. Fuente prop
pia.
aa)
b)
Fiigura 7. Podoscop
pas a) y termograafas b) pacientess con condicin d
diabtica,
P1
1 a P7. Fuente pro
opia.
bservar que lo
os pacientes P
P4 (42
De la Fig. 9 se puede ob
a
os) y P7 (5
52 aos), con
n condicin diabtica,
d
preesentan
so
obrepeso y obesidad resspectivamente. Los restan
ntes 5
paacientes diab
bticos presen
ntan un estaado nutricion
nal de
no
ormalidad de aacuerdo a la OMS.
O
Dos de los pacientes (P12 y
P14) sin con
ndicin diabtica presenttan obesidad, P11
obrepeso y loss restantes 7 see encuentran een condicin n
normal.
so
Ahora bien, dado
d
que ning
gn paciente ha sido diagnossticado
co
on pie diabticco grado cero
o, se utiliza la Temperatura Media
deel Pie, MFT
T, en esta oportunidad para evalu
uar la
su
usceptibilidad a neuropata diabtica
d
(ver Fig. 10), y el ndice
dee Hernndez-C
Corvo, IHC, p
para determinaar el tipo de p
pie, ver
Fiig. 11.
E paciente P12
El
2 es un caso atpico
a
dado q
que su podosccopa
(Fig
g. 8(a)) visuaalmente indicca condicin de normal con
tend
dencia a planittud en los doss pies, sin emb
bargo el resulltado
entrregado por la herramienta propuesta
p
en eeste trabajo in
ndica
algo
o totalmente alejado de esta situaci
n (Fig. 11). Se
deteermin que lo anterior se deebe a que la p
podoscopa no
o fue
proccesadamente ccorrectamentee por el sistem
ma debido a que
este paciente pressenta notable presencia de callosidades, algo
denciar en la prctica,
p
recalccndose enton
nces,
que se pudo evid
d la
en eeste punto, laa importancia de revisar laa rugosidad de
bveeda plantar an
ntes de tomar lla podoscopa..
Si se fusiona la informaci
n morfolgicca con la trm
mica
paraa el caso de lo
os pacientes P2
2 y P7 (los cassos con difereencia
del MFT entre p
pies ms signiificativo) se p
podra analizaar lo
uiente: el pie derecho, del paciente P2, tiene un MF
FT =
sigu
32.5
5 C mientras q
que el izquierd
do est por deebajo de los 30
0 C,
es decir que ell primero ess ms suscep
ptible a pad
decer
neurropata diabttica que el segundo (ver Tabla II); ell pie
FERRIN AND LOAIZA : A REAL-TIME MULTISPECTRAL COMPUTER VISION
deerecho del pacciente P7 tien
ne un MFT = 33 C, mientrras que
ell izquierdo est muy por encima del
d
anterior valor,
ap
proximadamen
nte 37 C, ees decir que los dos piees son
su
usceptibles a lla neuropata d
diabtica y en
n este caso el que se
en
ncuentra en mayor
m
riesgo ess el pie izquierrdo. Por otro llado, si
see observa la ccondicin dell tipo de pie (Fig. 11) se puede
in
nferir que en caso que esto
os pacientes sean diagnostticados
co
on pie diabticco grado cero la probabilidaad de ulceraci
n ser
m
ms alta en el paciente P7 que
q en P2 (reecurdese que P7 se
en
ncuentra en co
ondicin de ob
besidad), y en
n este caso lass zonas
deel antepi y eel taln son llas zonas mss vulnerables por el
m
mismo tipo de pisada
p
(tipo caavo) que tienen
ntes.
n estos pacien
2685
ura Media del Pie Izquierdo y Dereecho, MFT, para llos 17
Figurra 10. Temperatu
pacieentes. Fuente prop
pia.
TABLA IV. CAR
RACTERSTICA
AS MACROANTR
ROPOMTRICA
AS DE
LOS P
PACIENTES.
Paciente
E
Edad
(A
Aos)
a
Masa
Corporral
1 (K
Kg)
Talla
0.01 (m
m)
d
ndice de
Masa
a
Corporral
0.1 (Kg
g/m2)
P1
P
P
P2
P
P3
P
P4
P
P5
P
P6
P
P7
P
P8
P
P9
P
P10
P
P11
P
P12
P
P13
P
P14
P
P15
P
P16
P
P17
M
Mnimo
P
Promedio
M
Mximo
D
Desviacin
E
Estndar
51
18
18
42
39
31
52
48
19
10
19
51
13
25
29
16
20
10
32
52
15
54
64
54
65
54
61
78
58
62
45
70
98
72
106
63
57
65
45
66
106
16
1.56
1.64
1.55
1.57
1.59
1.61
1.60
1.64
1.68
1.42
1.63
1.80
1.78
1.88
1.77
1.69
1.80
1.42
1.66
1.88
0.12
22.2
23.8
22.5
26.4
21.4
23.5
30.5
21.6
22.0
22.3
26.3
30.3
22.7
30.0
20.1
20.0
20.0
20.0
23.9
30.5
3.6
Fiigura 9. Estado nu
utricional de los 1
17 pacientes de esstudio. Fuente pro
opia.
Figurra 11. ndice de Hernndez-Corvo del Pie Izquierdo y Derecho parra los
17 paacientes. Fuente p
propia.
IV. CONCL
LUSIONES
S
Se concibi e iimplement un
n sistema hard
dware-softwarre de
anllisis morfo-trrmico de la h
huella plantarr. La herramiienta
dem
mostr ser iguaal de confiablee y ms rpidaa que los mto
odos
va y
conv
vencionales co
on la particulaaridad de ser menos invasiv
mss objetiva, siempre y cuaando se cum
mplan a rigor los
prottocolos de caaptura de las podoscopass y las imgenes
infraarrojas.
L
La herramientaa permiti llev
var a cabo un
n estudio con ssiete
paciientes diabticcos y diez no diabticos. Se pudo verr las
diferencias trmiicas entre piees para el caso de pacieentes
bticos y la sim
militud trmica entre los piees de los pacieentes
diab
no d
diabticos. Ad
dems, se pudo
o observar quee el tipo de piie no
est correlacionaado a la cond
dicin diabtiica y que po
or el
conttrario la fusin
n de la inform
macin morfolgica a la trm
mica
perm
mite ampliar el poder de anlisis de lla huella plan
ntar,
pudiindose detecctar casos de alto riesgo de ulceracin
n en
paciientes diabticcos en el even
ntual caso de d
diagnstico dee pie
diab
btico grado cero, lo qu
ue significa que el anlisis
multiespectral de la huella plaantar, aqu pro
opuesto, perm
mitir
a
ms in
ntegral, y en co
onsecuencia u
un diagnstico ms
un anlisis
acerrtado. De esta manera se pod
dr ofrecer al paciente un mejor
m
procceso de rehabiilitacin fsicaa y en ltimas el acceso a m
ms y
mejo
ores herramieentas de estu
udio que prom
muevan un mejor
m
calid
dad de vida.
S
Se sugiere qu
ue en futuraas investigaciiones se reallicen
mejo
oras a nivel h
hardware al prroceso de cap
ptura de imgenes
infraarrojas dado que
q las condiciones son muy
y variables dee una
imag
gen a otra pu
udiendo aumeentar el error en el proceso
o de
med
didas de tempeeratura. Tambiin debe hacerrse ms flexib
ble la
tcn
nica de segmeentacin de laas podoscopaas permitiend
do la
2686
IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 8, AUG. 2015
caapacidad de an
nlisis a zonas de contacto obtenidas con
n otros
m
mtodos, como
o tintas, escneer, baropodogrrafa, o imgeenes de
hu
uellas trmicaas (no calibrad
das) mediante cristal lquido
o, entre
ottros.
AGRAD
DECIMIENTO
OS
l Informaci
n y la
Al Ministeriio de las Teccnologas de la
Comunicacin por el apoyo
o brindado a ttravs del pro
ograma
ma de Postgrrados en Ingeniera
Talento Digitaal. Al Program
EE) de la Un
niversidad del Valle,
Ellctrica y Eleectrnica (PPIE
po
or su gestin aadministrativaa que permiti que la investigacin
see llevar a cab
bo.
ERENCIAS
REFE
[1] J. Garzn, A.. Parra, and A. Pineda, El Possconflicto en Co
olombia:
Coordenadas p
para la Paz, P
Pontificia Univerrsidad Javeriana - Sede
Bogot, 2003.
Physiccal Medicine & Rehabilitation:
R
Prrinciples
[2] B. M. Kelly, DeLisas
and Practice, JJAMA, vol. 306, n
no. 2, Jul. 2011.
[3] S. Bagavathiap
ppan, J. Philip, T.
T Jayakumar, B
B. Raj, P. N. S. R
Rao, M.
Varalakshmi, and V. Mohan
n, Correlation between Plantaar Foot
Temperature and
a
Diabetic Neeuropathy: A Caase Study by U
Using an
Infrared Therm
mal Imaging Tech
hnique, Journal of Diabetes Scien
nces and
Technology, vo
ol. 4, no. 6, pp. 13
3861392, 2010.
[4
4] S. L. Diguezz, A. Jess, L. Snchez, M. Luisaa, Z. Snchez, an
nd E. J.
Martnez-lpezz, Anlisis de lo
os diferentes mto
odos de evaluacin de la
huella plantar, Retos. Nuevas ttendencias en Edu
ucacin Fsica, D
Deporte y
Recreacin, vo
ol. 19, pp. 4953, 2011.
[5] F. C. Soler, Bio
omecnica del Pie, 1st ed. 2008, p. 288.
[6] J. L. M. de la Fuente, Pod
dologa general y Biomecnica, 1st ed.
paa, 2003, p. 313
3.
Barcelona, Esp
[7] R. Hernndezz Corvo, Morf
rfologa funcion
nal deportiva: Sistema
locomotor, 1st ed. 2000.
[8] L. Staheli, D. C
Chew, and M. Co
orbet, The longitudinal arch. A su
urvey of
eight hundred and eighty-two feet in normal ch
hildren and adultts., The
journal of bonee and joiun surgeery. American Vollume, 1987.
[9] C. Dancloff, F.
F Forriol, and L
L. G. Pellico, R
Relacin entre diiferentes
parmetros raadiolgicos del p
pie.pdf, Revista
a Espaola de Cirugia
Osteoarticularr, pp. 151158, 19
989.
[10] C. A. Daz, A
A. Torres, J. I. R
Ramrez, L. F. G
Garca, and N.
lvarez,
Descripcin d
de un sistema paara la medicin de
d las presiones p
plantares
por medio del procesamiento d
de imgenes. Fasee I., Revista EIA
A, vol. 6,
41237, pp. 4356
6, 2006.
no. ISSN 1794
[11] C. Ferrin, X. Magdalena,
M
and H
H. Loaiza, Determ
minacin semiauttomtica
de parmetro
os morfolgicos de la huellaa plantar mediante el
procesamiento digital de imgenes, Revista Sisttemas & Telemttica, vol.
11, no. 27, pp. 926, 2013.
[12] L. Vilcahuamaan, EARLY DIA
AGNOSIS OF DIIABETIC FOOT USING
THERMAL IM
MAGES, Universit DOrlans, 20
013.
[13] H. Peregrina-b
barreto, L. A. Mo
orales-hernndez, J. J. Rangel-mag
gdaleno,
and P. D. Vzq
quez-rodrguez, T
Thermal image prrocessing for quaantitative
determination of temperaturee variations in
n plantar angio
osomes,
Instrumentatio
on and Measureement Technology
gy Conference (I
(I2MTC),
2013 IEEE Inteernational, pp. 1
5, 2013.
[14] C. Liu, F. van der Heijden, M. E
E. Klein, J. G. van
n Baal, S. a. Bus, and J. J.
van Netten, Infrared
dermal thermography on
o diabetic feet soles to
predict ulceratiions: a case study
y, Proceedings of SPIE, vol. 8572
2, pp. 1
9, Mar. 2013.
[15] J. Acero, P
PODOEST-DINA
A. http://new.in
nstitutoisb.com, Cali Colombia, 2012.
[16] R. S. Internatio
onal, FOOTSCA
AN. Belgium, 2014.
[17] C. M. Analysiss, FOOTQUEST
T - Optical 360 fo
oot scan. 2014.
[18] M. Mora, M. Carmen, L. Pav
vesi, E. Achu, aand H. Drut, A
A Pattern
Approach to Diiagnose Foot P
Plant Pathologiess: From
Recognition A
Segmentation tto Classification, in in Artificial Intelligence in M
Medicine,
R. Bellazzi, A. Abu-Hanna, and J. Hunterr, Eds. Springerr Berlin
Heidelberg, 20
007, pp. 378387.
D L. Balageas, T
Termografa Infraarroja: una tcnicca multifactica para la
[19] D.
E
Evaluacin
No Destructiva ( END ), in IV conferen
ncia Panamericana de
E
END,
2007, p. 14.
[20] S.
S J. Yoon, S. C. Noh, and H. H. C
Choi, Thermograaphic diagnosis sy
ystem
a
and
imaging algo
orithm by distribu
uted thermal dataa using single inffrared
s
sensor,
Current A
Applied Physics, vol. 10, no. 2, pp. 487497, Mar. 2
2010.
[21] M.
M Born and E. Wolf, Principless of Optics Electtromagnetic Theo
ory of
P
Propagation,
Inteerference and Diff
ffraction of Light, 7th ed. 1999, p. 9
985.
[22] E.
E Hecht, ptica, 3rd ed. 2001, p. 7
722.
[23] Logitech,
L
Tech
hnical Specificattions of Logiteech C920, Weebcam
L
Logitech
C920, 2014.
2
[Online]. A
Available: http:///www.logitech.com/esr
roam/product/hdpro-webcam-c920
0. [Accessed: 15--Aug-2014].
[24] F.
F Chaumette an
nd S. Hutchinson
n, Visual servo control. II. Advaanced
a
approaches
[Tuto
orial], IEEE Robotics & Automatiion Magazine, vo
ol. 14,
n 1, pp. 109118, 2007.
no.
[25] F.
F Chaumette an
and S. Hutchinson, Visual serrvo control. I. Basic
a
approaches,
IEE
EE Robotics &
p;amp; Automatiion Magazine, vo
ol. 13,
n 4, pp. 8290, 2006.
no.
[26] D.
D Kragic and H. I. Christenseen, Survey on Visual Servoing
g for
M
Manipulation.
[27] E.
E Marchand, F. S
Spindler, and F. C
Chaumette, ViSP
P for visual servoiing: a
g
generic
software p
platform with a wide
w
class of robo
ot control skills, IEEE
R
Robotics
& Autom
mation Magazine,, vol. 12, no. 4, pp
p. 4052, Dec. 20
005.
[28] B.
B Project, Beag
gleboard Organizzation, http://beeagleboard.org/, 2
2013.
[
[Online].
Availab
ble: http://beagleboard.org/. [Accesssed: 02-Oct-2013
3].
[29] C.
C Ferrin, X. Mag
gdalena, H. Loaiza, D. Lpez, and S. Henao, Sistem
ma de
E
Extraccin
Autom
mtica de Parmeetros Morfolgico
os de la Huella Pllantar
M
Mediante
Tcnicaas de Visin por Computador
C
en u
un Sistema Embeb
bido,
R
Revista
Colombia
ana de Tecnologa
as de Avanzada, vol. 1, no. 23, pp
p. 80
8 2014.
86,
[30] R.
R Gonzales and R. Woods, Trattamiento digital de
d imgenes. 199
96, p.
8
800.
[31] W.
W Skarbek and A. Koschan, Co
olour Image Segm
mentation. A Surrvey,
1
1994.
[32] B.
B Zitov and J. Flusser, Image rregistration meth
hods: a survey, IImage
a Vision Compu
and
uting, vol. 21, no. 11, pp. 977100
00, Oct. 2003.
[33] W.
W Schroeder, Th
he ITK Software Guide
G
Second Ed
dition Updated forr ITK
v
version
2 . 4. Kitw
ware Inc., 2005, p.
p 836.
[34] C.
C
Ferrin, X. Magdalena, and H. Loaizza, EXTRACC
CIN
A
AUTOMTICA
TROS TRMICO
OS DE LA HUE
ELLA
DE PARMET
P
PLANTAR
UT
TILIZANDO
T
TCNICAS
D
DE
VISIN
POR
C
COMPUTADOR
R, in XIII Enccuentro Naciona
al de ptica y IV
C
Conferencia
Andiina y del Caribe en ptica y sus A
Aplicaciones, 2013, p.
6
6.
[35] F.
F Systems, Therm
maCAM E320: Us
Users Manual. US
SA, 2006, p. 170.
[36] F.
F Bessy, J. Oliviier, and R. Bon,, ofeli: Open Faast and Efficient L
Level
S Implementatio
Set
on. https://code.g
google.com, 2011
1.
[37] KitWare,
K
Insigh
ht Segmentation
n and Registrattion Toolkit (IT
TK).
h
http://www.kitwa
are.com/index.htm
ml, 2006.
[38] C.
C Ferrin, SISTE
EMA DE VISIO
ON ARTIFICIAL MULTIESPECT
TRAL
P
PARA
ANALISIIS DE LA HUEL
LLA PLANTAR,, Youtube, 2013
3. [En
en:
l
lnea].
D
Disponible
h
https://www.youtu
ube.com/watch?v
v=hOlsILeYgmM
M. [Fecha de accesso: 1E
Enero-2015].
[39] OMS,
O
Organizaccin Mundial de la Salud (OMS), Estado Nutriciional,
2
2013.
[En lnea]. D
Disponible en: htttp://www.who.int/es/.
[40] G. Casellas and
d R. Berger, Stattistical Inference. 2nd. Edition. ISBN1 978-05342431
13:
128. 2001.
Ing. F
Fsico (2010) de
d la Universidaad del Cauca, Joven
J
Investtigador Colcienccias (2011). Maagister en Ingen
niera
Electrrnica (2015) den
ntro del Grupo de Percepcin y Sisttemas
versidad del Vallle. Investigador en el
Intelig
gentes de la Univ
Centro
o de Bioinformtiica y Biologa Co
omputacional - CB
BBC.
Sus rreas de inters so
on la visin artifiicial, el aprendizaaje de
mqu
uina y el procesam
miento de seales, imgenes y nubee de puntos.
Ing. E
Electricista (1990)) y Magister en Automtica (1995)) de la
Univeersidad del Valle; Doctor en Robttica y Visin Artiificial
(1999) de L'Universit d'Evry, Francia. Director de la Esscuela
genieras Elctricca y Electrnica de la Universidaad del
de Ing
Valle.. Codirector del G
Grupo de Investig
gacin en Percepccin y
Sistemas Inteligentes [PSI]. Areas de inters son la rob
btica mvil, la v
visin
miento digital de seales.
s
artificial y el procesam
You might also like
- Anexo Crucigrama AA3-EV01Document2 pagesAnexo Crucigrama AA3-EV01diana camacho32% (22)
- Cuadro Sinóptico. AA4-EV01Document1 pageCuadro Sinóptico. AA4-EV01Daniela GonzalezNo ratings yet
- Dalf 3 ProblemasDocument15 pagesDalf 3 ProblemasDaniela GonzalezNo ratings yet
- InsufladorDocument12 pagesInsufladorDaniela GonzalezNo ratings yet
- ANEXO E 245 Becas de Pregrado y Postgrado en La Universidad Nacional de SeúlDocument7 pagesANEXO E 245 Becas de Pregrado y Postgrado en La Universidad Nacional de SeúlDaniela GonzalezNo ratings yet
- Ensayo. Claudia R. La Ciencia de La Administración Pública. Robert DahlDocument4 pagesEnsayo. Claudia R. La Ciencia de La Administración Pública. Robert DahlJovi Griego100% (2)
- Ensayo. Claudia R. La Ciencia de La Administración Pública. Robert DahlDocument4 pagesEnsayo. Claudia R. La Ciencia de La Administración Pública. Robert DahlJovi Griego100% (2)
- Manual Desfibrilador HP 43100a Elaborado BIOMEDICAL INGENIOUS PDFDocument3 pagesManual Desfibrilador HP 43100a Elaborado BIOMEDICAL INGENIOUS PDFDaniela GonzalezNo ratings yet
- Audiometro Modelo 170Document42 pagesAudiometro Modelo 170Daniela GonzalezNo ratings yet
- InsufladorDocument12 pagesInsufladorDaniela GonzalezNo ratings yet
- WATO EX 65 Operatori S Manual Spanish V1 0 PDFDocument284 pagesWATO EX 65 Operatori S Manual Spanish V1 0 PDFDaniela Gonzalez100% (1)
- Trabajo TurismoDocument11 pagesTrabajo TurismoDaniela GonzalezNo ratings yet
- Manual de operación para lámpara de calor radianteDocument35 pagesManual de operación para lámpara de calor radianteWilson CepedaNo ratings yet
- XMIND Unity Operator's Manual 1.3c ES-OfFICIALDocument84 pagesXMIND Unity Operator's Manual 1.3c ES-OfFICIALDaniela GonzalezNo ratings yet
- 1621Document16 pages1621Daniela GonzalezNo ratings yet
- C5 Reflexion4Document4 pagesC5 Reflexion4Felipe RamonNo ratings yet
- 9650-0120-10 Rev ADocument26 pages9650-0120-10 Rev ADaniela GonzalezNo ratings yet
- Manual de operación para lámpara de calor radianteDocument35 pagesManual de operación para lámpara de calor radianteWilson CepedaNo ratings yet
- Recetas Latinas SaludablesDocument64 pagesRecetas Latinas SaludablesAmbar Coronado100% (1)
- 9650-0120-10 Rev ADocument26 pages9650-0120-10 Rev ADaniela GonzalezNo ratings yet
- DataDocument3 pagesDataDaniela GonzalezNo ratings yet
- Laboratório 1Document2 pagesLaboratório 1Daniela GonzalezNo ratings yet
- Trabajo TurismoDocument11 pagesTrabajo TurismoDaniela GonzalezNo ratings yet
- Anexo 1 - Anexo Teìcnico MICROACUEDUCTODocument53 pagesAnexo 1 - Anexo Teìcnico MICROACUEDUCTOElkinRafaelTovioNo ratings yet
- Sesión 13 Madera Ing Ennio Morán N.Document33 pagesSesión 13 Madera Ing Ennio Morán N.Luz Karen HPNo ratings yet
- Inicio de La Radio en VenezuelaDocument11 pagesInicio de La Radio en VenezuelaritcherNo ratings yet
- CodeGym SillabusDocument8 pagesCodeGym Sillabusjuan_vivanco_3No ratings yet
- Agosto FinalDocument613 pagesAgosto FinalHenry Santos Ynfante CastroNo ratings yet
- FichaNo61064 1Document3 pagesFichaNo61064 146t456No ratings yet
- 1566-2004 Condiciones Mínimas de Seguridad para Trabajos Ejecutados Por ContratoDocument13 pages1566-2004 Condiciones Mínimas de Seguridad para Trabajos Ejecutados Por ContratoNurys Gregoria Salazar Ramírez0% (1)
- Rubrica de Evaluacion Competencia DiseñaDocument3 pagesRubrica de Evaluacion Competencia Diseñasteve100% (3)
- Carta Comercial. Formato A4. Modelo de ImpresiónDocument9 pagesCarta Comercial. Formato A4. Modelo de ImpresiónrodgerelmejorNo ratings yet
- IngIndus3DCalAreaDocument8 pagesIngIndus3DCalAreaNancy VerdesotoNo ratings yet
- Tablas Dosificacion Morteros Y ConcretosDocument5 pagesTablas Dosificacion Morteros Y ConcretosKaren suarezNo ratings yet
- 1020146139Document341 pages1020146139MatrixDVRNo ratings yet
- Opcion de Grado ProcedimientoDocument14 pagesOpcion de Grado ProcedimientomarinaNo ratings yet
- Control de Proyectos con DashboardDocument8 pagesControl de Proyectos con DashboardDelgadoKattNo ratings yet
- Desmembracion y FraccionamientoDocument4 pagesDesmembracion y FraccionamientoAsdrubal Tuch67% (3)
- Herramientas de SeguridadDocument7 pagesHerramientas de SeguridadFelipe Cauich SantosNo ratings yet
- Tarea GMAWDocument29 pagesTarea GMAWcristianmatus100% (1)
- Tema 5 Comercio ElectronicoDocument32 pagesTema 5 Comercio ElectronicoWilmercito NajarroNo ratings yet
- Práctica Dirigida No. 2Document4 pagesPráctica Dirigida No. 2Ayrton Raqui Fernandez0% (1)
- Campana lineal CK601IX-A EAN 6948549365614 características filtros ledDocument1 pageCampana lineal CK601IX-A EAN 6948549365614 características filtros ledJosse Maykol Mundaca VasquezNo ratings yet
- Glosario de Terminos Veterinarios y Tecnologicos.Document5 pagesGlosario de Terminos Veterinarios y Tecnologicos.Delia LinaresNo ratings yet
- Modernidad en El Peru FINALDocument40 pagesModernidad en El Peru FINALYoselyn LiñanNo ratings yet
- Certificado Cajas y Conduletas Csr-Cer945299Document1 pageCertificado Cajas y Conduletas Csr-Cer945299paula andrea raveles salcedoNo ratings yet
- Ejercicios Resueltos Teoría de ColasDocument11 pagesEjercicios Resueltos Teoría de ColasSALMA MAGALÍ DE LA ROSA POSADASNo ratings yet
- 6 - Material de Trabajo - GTH PDFDocument43 pages6 - Material de Trabajo - GTH PDFLiana SalasNo ratings yet
- Entregable Final Comunicacion Oral y EscritaDocument5 pagesEntregable Final Comunicacion Oral y EscritaClaudio PicazoNo ratings yet
- Cómo Influye La Tecnología enDocument4 pagesCómo Influye La Tecnología enMartin Suarez AlcedoNo ratings yet
- Dis Comp 2018-II Sesion 3Document37 pagesDis Comp 2018-II Sesion 3Jerry Alejos GuardapucllaNo ratings yet
- Medidor de Venturi, Principios de Aerodinamica, Temperaturas Importantes y Evolucion Del TermometroDocument9 pagesMedidor de Venturi, Principios de Aerodinamica, Temperaturas Importantes y Evolucion Del TermometroNelson GomezNo ratings yet
- TP2 - de - SxxiDocument4 pagesTP2 - de - SxxiFabio Ikaczyk100% (2)