You might also like
- Nicol 2001Document19 pagesNicol 2001Clarence AG YueNo ratings yet
- 58 MelnikovDocument13 pages58 MelnikovMayurNo ratings yet
- 1 s2.0 S014102962200788X MainDocument9 pages1 s2.0 S014102962200788X MainQuang Thái NguyễnNo ratings yet
- Synthesis and Design of Multiphase Chemical and Biochemical ReactorsDocument5 pagesSynthesis and Design of Multiphase Chemical and Biochemical ReactorsmokasiniNo ratings yet
- Simulaciones Numericas Detalladas de Reactores de Lechofijo CataliticoDocument13 pagesSimulaciones Numericas Detalladas de Reactores de Lechofijo CataliticoSanchez JorgeNo ratings yet
- Numerical Analysis of Auto-Ignition of Ethanol: Vaibhav Kumar Sahu, Shrikrishna Deshpande, Vasudevan RaghavanDocument4 pagesNumerical Analysis of Auto-Ignition of Ethanol: Vaibhav Kumar Sahu, Shrikrishna Deshpande, Vasudevan RaghavanPavan KishoreNo ratings yet
- On Ribaucour Transformations and Applications To Linear Weingarten SurfacesDocument17 pagesOn Ribaucour Transformations and Applications To Linear Weingarten SurfacesDaniel González EricesNo ratings yet
- Chemical Engineering Science: Nadia Shardt, Yingnan Wang, Zhehui Jin, Janet A.W. ElliottDocument11 pagesChemical Engineering Science: Nadia Shardt, Yingnan Wang, Zhehui Jin, Janet A.W. ElliottAhmad HambaliNo ratings yet
- Tamburini2014 PDFDocument19 pagesTamburini2014 PDFOnesime MutebaNo ratings yet
- Taherzadeh2009 PDFDocument21 pagesTaherzadeh2009 PDFcharaf247No ratings yet
- A Non Equilibrium Stage Model of Multi Component Separation ProcessDocument8 pagesA Non Equilibrium Stage Model of Multi Component Separation ProcessSergio A. Rdz. F.No ratings yet
- Collection Zone Kinetic Model For Industrial Otation ColumnsDocument5 pagesCollection Zone Kinetic Model For Industrial Otation ColumnsMaria Paz Araya JorqueraNo ratings yet
- Aplicacion Del UnifacDocument10 pagesAplicacion Del UnifacHoward Palomino AhumadaNo ratings yet
- AboGhander2010 ChemicalEngineeringScience PostPrintDocument39 pagesAboGhander2010 ChemicalEngineeringScience PostPrintfurkanNo ratings yet
- Study On Viscosity of Conventional and Polymer Modified Asphalt Binders in Steady and Dynamic Shear DomainDocument12 pagesStudy On Viscosity of Conventional and Polymer Modified Asphalt Binders in Steady and Dynamic Shear Domainaakash singhNo ratings yet
- 18 Selection - and - Scaling - of - Ground - Motion - RDocument8 pages18 Selection - and - Scaling - of - Ground - Motion - Rprraaddeej chatelNo ratings yet
- Modelling Wastewater Treatment Plants with CFD and ASM ToolsDocument11 pagesModelling Wastewater Treatment Plants with CFD and ASM ToolsSong Nguyen NguyenNo ratings yet
- A Simple Analysis Method For Estimation of Required Damping Ratio For Seismic Response ReductionDocument9 pagesA Simple Analysis Method For Estimation of Required Damping Ratio For Seismic Response ReductionJuan José Bonilla ReinosoNo ratings yet
- Eas 0101003Document25 pagesEas 0101003Agamoni DasNo ratings yet
- 10 1016@j Cep 2019 107771Document42 pages10 1016@j Cep 2019 107771zjNo ratings yet
- A Modified UNIFAC ModelDocument16 pagesA Modified UNIFAC Modelmappemaq100% (1)
- Models - Sme.building Response SpectrumDocument28 pagesModels - Sme.building Response SpectrumVirat DesaiNo ratings yet
- Rietveld Refinement GuidelinesDocument15 pagesRietveld Refinement GuidelinesdanieldorelleNo ratings yet
- Morphology Development in Kenics Static MixersDocument10 pagesMorphology Development in Kenics Static MixersAN.ADAMMSNo ratings yet
- Efective Mass Transfer Area - de BritoDocument10 pagesEfective Mass Transfer Area - de BritoIvan RodrigoNo ratings yet
- Schur Complement IMplicit EXplicit Formulations For Dis 2023 Journal of CompDocument28 pagesSchur Complement IMplicit EXplicit Formulations For Dis 2023 Journal of Comptuyettran.eddNo ratings yet
- Kaminski 2017Document15 pagesKaminski 2017DANIEL ARTEAGA MENDOZANo ratings yet
- Periodic - Boundary - Condition - Technique - On - Carbon - FiDocument9 pagesPeriodic - Boundary - Condition - Technique - On - Carbon - FiNew SainNo ratings yet
- 1 s2.0 S0149197014002728 MainDocument7 pages1 s2.0 S0149197014002728 Mainniciu86No ratings yet
- A Disjunctive Programming Approach For The Optimal Design of Reactive Distillation ColumnsDocument13 pagesA Disjunctive Programming Approach For The Optimal Design of Reactive Distillation ColumnsMiguel PardoNo ratings yet
- International Journal of Heat and Fluid Flow: M. Meyer, S. Hickel, N.A. AdamsDocument10 pagesInternational Journal of Heat and Fluid Flow: M. Meyer, S. Hickel, N.A. AdamsManu ChakkingalNo ratings yet
- Kufa Journal of Engineering explores shear modeling approachesDocument24 pagesKufa Journal of Engineering explores shear modeling approachesJiabinNo ratings yet
- Experimental determination of the effect of RRP on solar air heater performanceDocument4 pagesExperimental determination of the effect of RRP on solar air heater performanceSharmila BadgujarNo ratings yet
- Finite Deformation Continuum Model For Single-Walled Carbon NanotubesDocument9 pagesFinite Deformation Continuum Model For Single-Walled Carbon NanotubesEduardo GarciaNo ratings yet
- Engineering20101100005 44076873Document13 pagesEngineering20101100005 44076873Abdalla Mohamed AbdallaNo ratings yet
- Aub 2000Document10 pagesAub 2000rawadNo ratings yet
- Mean Square DesignDocument12 pagesMean Square DesignNguyen Tan TienNo ratings yet
- CFD Study of Mixing in Anaerobic DigesterDocument15 pagesCFD Study of Mixing in Anaerobic DigesterEduard Moliné RoviraNo ratings yet
- Xue 2012Document9 pagesXue 2012Jair Ricse PizarroNo ratings yet
- Faisal KhanDocument10 pagesFaisal KhanSyed Shah Jehan GillaniNo ratings yet
- MITC Nite Elements For Laminated Composite Plates: G. Alfano, F. Auricchio, L. Rosati and E. SaccoDocument32 pagesMITC Nite Elements For Laminated Composite Plates: G. Alfano, F. Auricchio, L. Rosati and E. SaccoHamed MemarianNo ratings yet
- Arora 2D ModelDocument15 pagesArora 2D Modelktjayakumar3878No ratings yet
- "Response Surface Methodology:An Overview": Ashwin Pathak, Dr. Vijaya Kumar K.NDocument5 pages"Response Surface Methodology:An Overview": Ashwin Pathak, Dr. Vijaya Kumar K.Ncsrajmohan2924No ratings yet
- Comparison of Indoor Aerosol Particle ConcentrationDocument8 pagesComparison of Indoor Aerosol Particle ConcentrationAyberk salim mayilNo ratings yet
- Karan Minor ProjectDocument25 pagesKaran Minor ProjectBrijamohan JhaNo ratings yet
- Seismic Design of Structures With Supplemental Maxwell Model-Based Brace-Damper SystemsDocument8 pagesSeismic Design of Structures With Supplemental Maxwell Model-Based Brace-Damper SystemsDac PiNo ratings yet
- 1 s2.0 S0307904X2200453X MainDocument22 pages1 s2.0 S0307904X2200453X MainjavierNo ratings yet
- Chemical Engineering Science: W. Hu, K. Hadler, S.J. Neethling, J.J. CilliersDocument10 pagesChemical Engineering Science: W. Hu, K. Hadler, S.J. Neethling, J.J. CilliersacetilenNo ratings yet
- AR - Part IDocument20 pagesAR - Part IDeepshikhaSinghNo ratings yet
- Chemical Engineering ScienceDocument7 pagesChemical Engineering ScienceclaudiosldfNo ratings yet
- Misconceptions and Generalizations of The Den Hartog Galloping CriterionDocument23 pagesMisconceptions and Generalizations of The Den Hartog Galloping Criterionel000011No ratings yet
- CFD ModellingDocument9 pagesCFD ModellingKannan VenkatNo ratings yet
- Reaction Kinetics-Reactor DesignDocument17 pagesReaction Kinetics-Reactor Designzorro21072107No ratings yet
- Icwe Full-Paper PDFDocument10 pagesIcwe Full-Paper PDFAnonymous FYiVPYgXVUNo ratings yet
- Numerical Investigation of Bend and Torus Flows, Part I Effect of Swirl Motion On Flow Structure in U-BendDocument14 pagesNumerical Investigation of Bend and Torus Flows, Part I Effect of Swirl Motion On Flow Structure in U-BendSami ur RehmanNo ratings yet
- Jurnal TPSDocument12 pagesJurnal TPSNurul HabibahNo ratings yet
- PaperfDocument7 pagesPaperfABHISHEK CHAUHANNo ratings yet
- Run Your Equilibrium Model in Six StepsDocument13 pagesRun Your Equilibrium Model in Six StepsClarence AG YueNo ratings yet
- Run Your Equilibrium Model in Six StepsDocument13 pagesRun Your Equilibrium Model in Six StepsClarence AG YueNo ratings yet
- Dimethoxy ModelDocument141 pagesDimethoxy ModelClarence AG YueNo ratings yet
- SIX STEPS TO RUN YOUR MODEL IN KINTECUSDocument127 pagesSIX STEPS TO RUN YOUR MODEL IN KINTECUSClarence AG YueNo ratings yet
- 6 STEPS TO RUN YOUR KINTECUS MODELDocument12 pages6 STEPS TO RUN YOUR KINTECUS MODELClarence AG YueNo ratings yet
- Zhang Anoxic-Fitting Multiple DatasetsDocument56 pagesZhang Anoxic-Fitting Multiple DatasetsClarence AG YueNo ratings yet
- Zhang Aerobic-Fitting Multiple DatasetsDocument63 pagesZhang Aerobic-Fitting Multiple DatasetsClarence AG YueNo ratings yet
- Enzyme Regression Fitting BOOTSTRAPPINGDocument11 pagesEnzyme Regression Fitting BOOTSTRAPPINGClarence AG YueNo ratings yet
- Wolfrum With Temp ProgramDocument39 pagesWolfrum With Temp ProgramClarence AG YueNo ratings yet
- Ethanol CombustionDocument47 pagesEthanol CombustionClarence AG YueNo ratings yet
- Combustion Workbook OH MultifitDocument38 pagesCombustion Workbook OH MultifitClarence AG YueNo ratings yet
- VPO Budget EstimateDocument1 pageVPO Budget EstimateClarence AG YueNo ratings yet
- Run Your Model in Six StepsDocument79 pagesRun Your Model in Six StepsClarence AG YueNo ratings yet
- Enzyme Regression Fitting BOOTSTRAPPINGDocument11 pagesEnzyme Regression Fitting BOOTSTRAPPINGClarence AG YueNo ratings yet
- Polymer Multifit MulticonditionsDocument33 pagesPolymer Multifit MulticonditionsClarence AG YueNo ratings yet
- Simultaneous Heat and Mass Transfer (SHMT) : 7th Semester, B.Sc. Chemical Engineering Session 2008 Delivered byDocument43 pagesSimultaneous Heat and Mass Transfer (SHMT) : 7th Semester, B.Sc. Chemical Engineering Session 2008 Delivered byClarence AG YueNo ratings yet
- Attainable Regions For A Reactor: Application of Plot: Chemical Engineering Research and DesignDocument20 pagesAttainable Regions For A Reactor: Application of Plot: Chemical Engineering Research and DesignClarence AG YueNo ratings yet
- Li 2014Document6 pagesLi 2014Clarence AG YueNo ratings yet
- Lim 2014Document12 pagesLim 2014Clarence AG YueNo ratings yet
- Lesson 1Document4 pagesLesson 1Clarence AG YueNo ratings yet
- Latin Unit 1 (Primer Ecclesiastical Latin Textbook)Document2 pagesLatin Unit 1 (Primer Ecclesiastical Latin Textbook)Clarence AG YueNo ratings yet
- Engineering Graph Paper BWDocument3 pagesEngineering Graph Paper BWClarence AG YueNo ratings yet
- An Idiot's Guide To Square NotesDocument12 pagesAn Idiot's Guide To Square NotesOgangwu BenjaminNo ratings yet
- CH 13Document5 pagesCH 13Clarence AG YueNo ratings yet
- We Mourn PDFDocument3 pagesWe Mourn PDFClarence AG YueNo ratings yet
- Engineering Graph Paper BWDocument1 pageEngineering Graph Paper BWmusa727No ratings yet
- Enzyme Regression Fitting BOOTSTRAPPINGDocument11 pagesEnzyme Regression Fitting BOOTSTRAPPINGClarence AG YueNo ratings yet
- Altronic EPC-50 Operating Manual (FORM EPC-50 OM)Document45 pagesAltronic EPC-50 Operating Manual (FORM EPC-50 OM)francis_mouille_iiNo ratings yet
- BiochemEngg ReportDocument14 pagesBiochemEngg ReportJenny LlanesNo ratings yet
- Wphs Chemistry Unit 5 Packet Stoichiometry: Bergmann-SamsDocument56 pagesWphs Chemistry Unit 5 Packet Stoichiometry: Bergmann-SamsShin SasakiNo ratings yet
- GenChem1 Module3Document29 pagesGenChem1 Module3Nancy DumpitNo ratings yet
- UquirilibiumDocument30 pagesUquirilibiumAlif Alfarisyi SyahNo ratings yet
- UNZA Chemistry HandbookDocument79 pagesUNZA Chemistry HandbookJohn Chanda100% (4)
- 4 Chapter 3 0Document59 pages4 Chapter 3 0azizNo ratings yet
- LAS-Gen - Chem2 MELC 9 Q3-Week-3.Document15 pagesLAS-Gen - Chem2 MELC 9 Q3-Week-3.Jewel Marie BacalangcoNo ratings yet
- Fundamentals of Material Balance - 1 LECTURE 4Document30 pagesFundamentals of Material Balance - 1 LECTURE 4OZIS AcademyNo ratings yet
- Unit 3Document109 pagesUnit 3ALiNo ratings yet
- Stoichiometry of Formulas and EquationsDocument45 pagesStoichiometry of Formulas and EquationsAlexander TiopanNo ratings yet
- Mindmap For Physical ChemistryDocument23 pagesMindmap For Physical Chemistryapi-373433388% (8)
- Normality Primer: Examples: 1.0 M HCL 1.0 N HCLDocument7 pagesNormality Primer: Examples: 1.0 M HCL 1.0 N HCLChristian EdulanNo ratings yet
- 0691085323MathemChemical PDFDocument284 pages0691085323MathemChemical PDFLakshmi BurraNo ratings yet
- Acid Base Equilibria PDFDocument30 pagesAcid Base Equilibria PDFLin Xian XingNo ratings yet
- #2 - Fundamentals of Microbial Growth StoichiometryLDocument18 pages#2 - Fundamentals of Microbial Growth StoichiometryLRavi Kumar0% (1)
- Answer: B: Selected/modified From Brown Et Al: Chemistry The Central Science, 10e, 12e, 13e TestbanksDocument6 pagesAnswer: B: Selected/modified From Brown Et Al: Chemistry The Central Science, 10e, 12e, 13e Testbanksفاطمة كليبNo ratings yet
- Reaction Stoichiometry Part 2 and Solution Stoichiometry PDFDocument10 pagesReaction Stoichiometry Part 2 and Solution Stoichiometry PDFGeraldNo ratings yet
- Condensation Reactions ADocument28 pagesCondensation Reactions ANino FelicesNo ratings yet
- NEB Chemistry Syllabus XI & XIIDocument47 pagesNEB Chemistry Syllabus XI & XIIBhanu Aryal67% (3)
- Complete PDFDocument138 pagesComplete PDFSaid SkaliNo ratings yet
- 10 - StoichiometryDocument23 pages10 - StoichiometryBenedict LarocoNo ratings yet
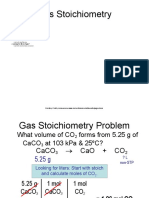
- Gas StoichiometryDocument10 pagesGas StoichiometryAnn DayritNo ratings yet
- Important Notes On Ana Chem Lecture 4Document6 pagesImportant Notes On Ana Chem Lecture 4Eliza Loren PalleraNo ratings yet
- Chemical Equations and Stoichiometry PDFDocument19 pagesChemical Equations and Stoichiometry PDFPanda MimiNo ratings yet
- PMDC MDCAT Curriculum 2023Document30 pagesPMDC MDCAT Curriculum 2023Muhammad Haris AzharNo ratings yet
- Chemistry Handbook Part 1Document247 pagesChemistry Handbook Part 1Bezimeni BezimenovicNo ratings yet
- Elements, Compounds, Chemical Equations and Calculations ExplainedDocument80 pagesElements, Compounds, Chemical Equations and Calculations ExplainedNurhayati HasanahNo ratings yet
- Synthesis and Characterization of Pigments Based On Copper-Zinc Aluminate (CuxZn1-xAl2O4) by CombustionDocument12 pagesSynthesis and Characterization of Pigments Based On Copper-Zinc Aluminate (CuxZn1-xAl2O4) by CombustionJUNCONo ratings yet
- KCALCDocument12 pagesKCALCPaty ParedsNo ratings yet