You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- DC MotorDocument47 pagesDC MotorArun SaraswathyNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Automotive Embedded Systems PDFDocument46 pagesAutomotive Embedded Systems PDFYellaturi Siva Kishore ReddyNo ratings yet
- Power Electronics LectureDocument84 pagesPower Electronics LecturevisaguyNo ratings yet
- Instruction Book FXe1-5 enDocument32 pagesInstruction Book FXe1-5 envisaguyNo ratings yet
- Personal Budgeting Trend For A PersonDocument2 pagesPersonal Budgeting Trend For A PersonNufita Twandita DewiNo ratings yet
- Personal Budgeting Trend For A PersonDocument2 pagesPersonal Budgeting Trend For A PersonNufita Twandita DewiNo ratings yet
- Daily Self-Evaluation - Monthly Data: P H Y S I C A LDocument1 pageDaily Self-Evaluation - Monthly Data: P H Y S I C A LSead ZejnilovicNo ratings yet
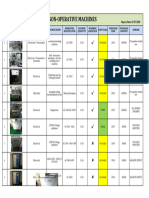
- Non Operative MachinesDocument1 pageNon Operative MachinesvisaguyNo ratings yet
- Simple Gantt Chart1Document3 pagesSimple Gantt Chart1misszomby100% (1)
- Holiday Budget PlannerDocument2 pagesHoliday Budget PlannervisaguyNo ratings yet
- Process Map ExampleDocument3 pagesProcess Map ExamplevisaguyNo ratings yet
- Control SystemsDocument1 pageControl SystemsvisaguyNo ratings yet
- Holiday Budget PlannerDocument2 pagesHoliday Budget PlannervisaguyNo ratings yet
- Simple Gantt Chart1Document3 pagesSimple Gantt Chart1misszomby100% (1)
- Personal Budgeting Trend For A PersonDocument2 pagesPersonal Budgeting Trend For A PersonNufita Twandita DewiNo ratings yet
- Intelligent Security System PDFDocument62 pagesIntelligent Security System PDFluiz augusto vieiraNo ratings yet
- ps25251 DatasheetDocument6 pagesps25251 DatasheetvisaguyNo ratings yet
- Ieee 11MS09 HRDocument6 pagesIeee 11MS09 HRvisaguyNo ratings yet
- At CommandDocument9 pagesAt CommandvisaguyNo ratings yet
- AVR194 Brushless DC Motor Control Using ATMega32M1Document16 pagesAVR194 Brushless DC Motor Control Using ATMega32M1u776287No ratings yet
- Power Spectral Density CodeDocument4 pagesPower Spectral Density CodevisaguyNo ratings yet
- Velocity of Sound On Kundts TubeDocument7 pagesVelocity of Sound On Kundts Tubevisaguy100% (1)
- Term Paper Bachelor IT 16s.unlockedDocument11 pagesTerm Paper Bachelor IT 16s.unlockedvisaguyNo ratings yet
- Making Sentences - EnglishDocument10 pagesMaking Sentences - Englishrjumaat100% (2)
- IBPS Clerk Vacancies by State: SC, ST, OBC, UR, Others - Total 39690Document1 pageIBPS Clerk Vacancies by State: SC, ST, OBC, UR, Others - Total 39690visaguyNo ratings yet
- Acoustic ImpedanceDocument4 pagesAcoustic ImpedancevisaguyNo ratings yet
- Payment Instruments in India: Currency, Cheques, DraftsDocument5 pagesPayment Instruments in India: Currency, Cheques, DraftssciencenokiaNo ratings yet
- Alernate FuelsDocument4 pagesAlernate FuelsvisaguyNo ratings yet
- Finite Element Analysis of Deep DrawingDocument4 pagesFinite Element Analysis of Deep DrawingTamer HagasNo ratings yet