You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
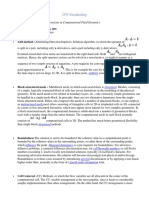
- CFD VocabularyDocument10 pagesCFD VocabularyAmir LachrafNo ratings yet
- Practice Test: Chapter 7: Counting PrinciplesDocument8 pagesPractice Test: Chapter 7: Counting PrinciplesDoctor ViddaNo ratings yet
- Cert-Ece Mathematics: Final CoachingDocument7 pagesCert-Ece Mathematics: Final CoachingHary KrizNo ratings yet
- Syllabus For B.SC (Mathematics) GraduatesDocument6 pagesSyllabus For B.SC (Mathematics) GraduatesGoutham VanamalaNo ratings yet
- Quant Daily Task Day - 115Document7 pagesQuant Daily Task Day - 115Aakash JaiwalNo ratings yet
- Pre College AlgebraDocument3 pagesPre College AlgebraChristelleNo ratings yet
- Summary MATH1131 AlgebraDocument42 pagesSummary MATH1131 AlgebraClinton3011No ratings yet
- Practical 1: Solving Differential Equations Using MathematicaDocument30 pagesPractical 1: Solving Differential Equations Using MathematicaIshita AnejaNo ratings yet
- Module 1e Non-Linear-systemDocument7 pagesModule 1e Non-Linear-systemisaganiNo ratings yet
- Curriculum Map - Math 8Document9 pagesCurriculum Map - Math 8France Easty NoynayNo ratings yet
- 10th Alg Handwritten Notes (Galaxy of Maths)Document35 pages10th Alg Handwritten Notes (Galaxy of Maths)hemant maliNo ratings yet
- Mathematics 12 (2.1 TO 2.5)Document3 pagesMathematics 12 (2.1 TO 2.5)Umar NaeemNo ratings yet
- Wigner 1939Document56 pagesWigner 1939lorenzusNo ratings yet
- Iast Lect24Document10 pagesIast Lect24IgorNo ratings yet
- Circles - Parabolas PowerpointDocument16 pagesCircles - Parabolas PowerpointRhoselle Mae GenandaNo ratings yet
- Calculus III Lecture NotesDocument391 pagesCalculus III Lecture NotesRafael AlmeidaNo ratings yet
- Apollonius of PergaDocument29 pagesApollonius of PergaVicky FelicianoNo ratings yet
- Du MSC Mathematics 2019 Entrance ExamDocument14 pagesDu MSC Mathematics 2019 Entrance ExamVibhu VikramadityaNo ratings yet
- Matlab Optimization Toolbox OptimtoolDocument77 pagesMatlab Optimization Toolbox OptimtoolWailbakhawail97gmail.com WailbakhaNo ratings yet
- Lecture-11 Flux Density and Gauss LawDocument12 pagesLecture-11 Flux Density and Gauss LawDanish FalakNo ratings yet
- Application of The Concept of Sequence and Arithmetic Series in Economics 1Document17 pagesApplication of The Concept of Sequence and Arithmetic Series in Economics 1ARFIAN TANJUNGNo ratings yet
- APPLICation of Solving Polynomial EquationDocument13 pagesAPPLICation of Solving Polynomial EquationMilburn MacalosNo ratings yet
- Introduction To Matlab Application To Electrical Engineering Part IDocument99 pagesIntroduction To Matlab Application To Electrical Engineering Part ITrương ĐứcNo ratings yet
- 4 - Integration by Partial Fractions PDFDocument4 pages4 - Integration by Partial Fractions PDFErgie PaglinawanNo ratings yet
- RD Sharma Solutions For Class 10 Chapter 8 Quadratic Equations PDFDocument75 pagesRD Sharma Solutions For Class 10 Chapter 8 Quadratic Equations PDFradha raman UpadhyayNo ratings yet
- Asymptotic Notation, Review of Functions & SummationsDocument39 pagesAsymptotic Notation, Review of Functions & SummationsLalita LuthraNo ratings yet
- MATE 3031 Arturĥo Portnoy.802162484.quiz2.2Document6 pagesMATE 3031 Arturĥo Portnoy.802162484.quiz2.2Rosimar GavillanNo ratings yet
- Geankoplis Answer 14Document2 pagesGeankoplis Answer 14Angela Aprina Kartika PutriNo ratings yet
- Lab04 GLS554Document13 pagesLab04 GLS554Muhammad IrfanNo ratings yet
- Mcs 013Document21 pagesMcs 013D.J. VykNo ratings yet