You might also like
- Generate 40kHz PWM Waveform with 50% Duty CycleDocument8 pagesGenerate 40kHz PWM Waveform with 50% Duty CycleDharanNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerDocument12 pages16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerLauderi MartinsNo ratings yet
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- PWM DAN TIMERDocument54 pagesPWM DAN TIMERmasrinaNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Chapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Document63 pagesChapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Pooja BanNo ratings yet
- Supply Voltage: Download Full-Size ImageDocument7 pagesSupply Voltage: Download Full-Size ImageDharanNo ratings yet
- Digital Signal Processing Project Report: Ihtisham Ul HaqDocument9 pagesDigital Signal Processing Project Report: Ihtisham Ul Haqihtishamul HaqNo ratings yet
- Control DC Motor Speed using STM32 PWMDocument4 pagesControl DC Motor Speed using STM32 PWMJohn FarandisNo ratings yet
- ProjectDocument25 pagesProject9897856218No ratings yet
- CCP PWMDocument19 pagesCCP PWMalaa_saq100% (1)
- PWM Using 8 0 5 1 A N D P I C: BY Balaji K S Sai Kishore P GDocument16 pagesPWM Using 8 0 5 1 A N D P I C: BY Balaji K S Sai Kishore P GPoonthalirNo ratings yet
- DC Motor Speed ControlDocument5 pagesDC Motor Speed ControlAnita WulansariNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 17Document40 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 17Tomás BurónNo ratings yet
- Flextimer and Adc Synchronization For Field Oriented Control On KinetisDocument11 pagesFlextimer and Adc Synchronization For Field Oriented Control On KinetisElias CarvalhoNo ratings yet
- Siren Project With Pic MicrocontrollerDocument12 pagesSiren Project With Pic MicrocontrollerMatthew Hunter100% (1)
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 11Document34 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 11Tomás BurónNo ratings yet
- MICRO Servo Motor Control using PIC16F877ADocument12 pagesMICRO Servo Motor Control using PIC16F877Aeeindustrial100% (1)
- Temp Based Fan Speed ControlDocument4 pagesTemp Based Fan Speed ControlGaurav PlayyBoyNo ratings yet
- Increase The Frequency Resolution of PWM ModulesDocument10 pagesIncrease The Frequency Resolution of PWM Modulesxeratule100% (1)
- Secrets of Arduino PWMDocument8 pagesSecrets of Arduino PWMpcrmengeNo ratings yet
- Getting Started With PWM Using CCP On PIC18 DS90003270ADocument23 pagesGetting Started With PWM Using CCP On PIC18 DS90003270Arahimbencheikh12No ratings yet
- PWM Freq Arduino DueDocument9 pagesPWM Freq Arduino DueEdgar Eduardo Medina CastañedaNo ratings yet
- Secrets of Arduino PWMDocument20 pagesSecrets of Arduino PWMDany Setyawan100% (1)
- Infineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENDocument42 pagesInfineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENFatenn BellakhdharNo ratings yet
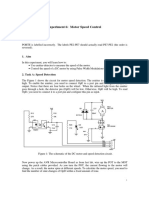
- Experiment 6: Motor Speed Control: ErratumDocument5 pagesExperiment 6: Motor Speed Control: ErratumBambang PrasetyoNo ratings yet
- PWM, A Software Solution For The PIC16CXXX: MethodsDocument14 pagesPWM, A Software Solution For The PIC16CXXX: Methodsjavixl1No ratings yet
- L 122a 6Document13 pagesL 122a 6Bogdan Alin100% (1)
- Erii21 Motor Control PWMDocument12 pagesErii21 Motor Control PWMpallinalvitesNo ratings yet
- Control UnitDocument11 pagesControl UnitDon KosalaNo ratings yet
- 5.2 PWM 7 Mac 2017Document34 pages5.2 PWM 7 Mac 2017Elawarasi Nadarajan100% (1)
- DSP GateDocument5 pagesDSP Gatebodige123No ratings yet
- ShortTest2-2016 SolutionDocument2 pagesShortTest2-2016 SolutionYash MaharajNo ratings yet
- 06 - Timer With PWM PDFDocument14 pages06 - Timer With PWM PDFSrikanth MahanthiNo ratings yet
- Slaa 116Document21 pagesSlaa 116misaelrodrigoNo ratings yet
- PWMDocument17 pagesPWMmaintboardNo ratings yet
- PWM, A Software Solution For The PIC16CXXX: MethodsDocument13 pagesPWM, A Software Solution For The PIC16CXXX: MethodsCerres WindelNo ratings yet
- The University of Texas at Arlington Timers, Capture/Compare/PWMDocument22 pagesThe University of Texas at Arlington Timers, Capture/Compare/PWMadamwaiz100% (1)
- AVR 133: Long Delay Generation Using The AVR MicrocontrollerDocument8 pagesAVR 133: Long Delay Generation Using The AVR MicrocontrollernicoletabytaxNo ratings yet
- AVR135 Using Timer Capture To Measure PWM Duty CycleDocument12 pagesAVR135 Using Timer Capture To Measure PWM Duty CycleTien-Thinh NguyenNo ratings yet
- DKAN0005A: PWM Example Using Microchip's Capture/Compare/PWM ModuleDocument6 pagesDKAN0005A: PWM Example Using Microchip's Capture/Compare/PWM ModulevictorhugoseNo ratings yet
- PWM With Microcontroller 8051 For SCR or Triac Power ControlDocument8 pagesPWM With Microcontroller 8051 For SCR or Triac Power ControlSyedMahinNo ratings yet
- Sesion - 11 - Timer 2 y PWMDocument22 pagesSesion - 11 - Timer 2 y PWMMafa GuillénNo ratings yet
- Design of The Sine Wave Generating Circuit Based On The Atmega128A MicrocontrollerDocument5 pagesDesign of The Sine Wave Generating Circuit Based On The Atmega128A MicrocontrollerhamidNo ratings yet
- Eeol 2007aug13 Pow Ems Opt An PDFDocument22 pagesEeol 2007aug13 Pow Ems Opt An PDFtimur_okNo ratings yet
- Paper VSD Agustus 2018Document6 pagesPaper VSD Agustus 2018Purwadi Agus DarwitoNo ratings yet
- Generation of PWM Using Verilog in FPGADocument7 pagesGeneration of PWM Using Verilog in FPGARajani kant tiwariNo ratings yet
- Generation of PWM Using Verilog in FPGA PDFDocument7 pagesGeneration of PWM Using Verilog in FPGA PDFRajani kant tiwariNo ratings yet
- Cellphone Operated Robotic ArmDocument55 pagesCellphone Operated Robotic ArmVinay ReddyNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - A - 18Document50 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - A - 18Tomás BurónNo ratings yet
- Time Division Multiplexing & DemultiplexingDocument11 pagesTime Division Multiplexing & Demultiplexingaeganajith9No ratings yet
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 pagesHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 18Document44 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 18Tomás BurónNo ratings yet
- Pulse Width ModulationDocument6 pagesPulse Width Modulationnursenakacar2No ratings yet
- Ac Voltage Controller Using Thyristor Project Report by SandeepDocument29 pagesAc Voltage Controller Using Thyristor Project Report by SandeepSANDEEP DHANDA100% (1)
- En - stm32l4 WDG Timers GptimDocument64 pagesEn - stm32l4 WDG Timers GptimGia LữNo ratings yet
- TOPIC 5 - PWMDocument23 pagesTOPIC 5 - PWMMuhammad WaqiuddinNo ratings yet
- Generation of PWM Using Verilog in FPGA 11Document7 pagesGeneration of PWM Using Verilog in FPGA 11Rajani kant tiwariNo ratings yet
- Ats 150kva Asbuilt2-ModelDocument1 pageAts 150kva Asbuilt2-Modelahmed hassanNo ratings yet
- How A Magneto Works by Mark SeibertDocument4 pagesHow A Magneto Works by Mark SeibertTimothy Roy Charles KetleyNo ratings yet
- MotorDocument27 pagesMotorahmed hassanNo ratings yet
- ch01 PDFDocument71 pagesch01 PDFahmed hassanNo ratings yet
- Voltage RegulatorsDocument10 pagesVoltage Regulatorsahmed hassanNo ratings yet
- ThermocoupleDocument2 pagesThermocoupleJackson AnthonyNo ratings yet
- DOE Fundamentals Handbook, Mechanical Science, Volume 1 of 2Document122 pagesDOE Fundamentals Handbook, Mechanical Science, Volume 1 of 2Bob VinesNo ratings yet
- Waukesha Training Catalog - 2015Document26 pagesWaukesha Training Catalog - 2015ahmed hassan100% (1)
- Funadmentals of Diesel EnginesDocument153 pagesFunadmentals of Diesel Enginesjheathusmc100% (2)
- Type2 - (IEC 60947-4-1)Document21 pagesType2 - (IEC 60947-4-1)011253No ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Engine PerformanceDocument6 pagesEngine Performanceahmed hassanNo ratings yet
- Brochure Ecodial-EnDocument4 pagesBrochure Ecodial-EnMostafa AliNo ratings yet
- ThermocoupleDocument2 pagesThermocoupleJackson AnthonyNo ratings yet
- 3516BDocument392 pages3516Bmuhammad arif95% (22)
- CAT ET Basic Engine Rating Change ProceduresDocument11 pagesCAT ET Basic Engine Rating Change Proceduresbjm2060% (1)
- z256 257Document3 pagesz256 257AlecRockyNo ratings yet
- 8 Magnet Dimensioner Index Supplement Koppling Verkstadsmanual 225-247Document22 pages8 Magnet Dimensioner Index Supplement Koppling Verkstadsmanual 225-247ahmed hassanNo ratings yet
- 0900 0301 PDFDocument51 pages0900 0301 PDFahmed hassanNo ratings yet
- SkimmingDocument2 pagesSkimmingapi-170611830No ratings yet
- IB Lite 1.8 Reference GuideDocument23 pagesIB Lite 1.8 Reference GuideJorge100% (1)
- Ats PrinciplesDocument41 pagesAts Principlesahmed hassanNo ratings yet
- IGS NT Starter Kit Getting Started Guide 02 2008Document14 pagesIGS NT Starter Kit Getting Started Guide 02 2008ahmed hassanNo ratings yet
- 07727997Document9 pages07727997ahmed hassanNo ratings yet
- 056-020 Loss of Excitation PDFDocument1 page056-020 Loss of Excitation PDFFernando MendozaNo ratings yet
- DSE generator overcurrent protection settingsDocument2 pagesDSE generator overcurrent protection settingsAndersonNo ratings yet
- DSE generator overcurrent protection settingsDocument2 pagesDSE generator overcurrent protection settingsAndersonNo ratings yet
- 500 UserDocument153 pages500 Userahmed hassanNo ratings yet
- Type2 - (IEC 60947-4-1)Document21 pagesType2 - (IEC 60947-4-1)011253No ratings yet
- 2010-04-13 003255 DiagramDocument2 pages2010-04-13 003255 DiagramJaffer HussainNo ratings yet
- Dyk 5 27Document139 pagesDyk 5 27smzbncszqNo ratings yet
- Chapter 11 5Document18 pagesChapter 11 5Muhammad FarhanNo ratings yet
- E School Management SystemDocument36 pagesE School Management SystemShivangi Priya VlogsNo ratings yet
- KUKA OfficeLite 87 enDocument48 pagesKUKA OfficeLite 87 enMatyas TakacsNo ratings yet
- Russian Numbers - Russian Language Lesson 2 PDFDocument1 pageRussian Numbers - Russian Language Lesson 2 PDFSuhas Natu100% (1)
- Administration Guide: Fortinet Server Authentication Extension™ Version 3.0 MR7Document36 pagesAdministration Guide: Fortinet Server Authentication Extension™ Version 3.0 MR7regabriNo ratings yet
- NBA QP FORMAT - Cycle Test 01 - III Yr - EHOSDocument6 pagesNBA QP FORMAT - Cycle Test 01 - III Yr - EHOSskarthikpriyaNo ratings yet
- The VERB HAVE as a main and auxiliary verbDocument7 pagesThe VERB HAVE as a main and auxiliary verbKhumarNo ratings yet
- Template Main Manuscript IjnmsDocument3 pagesTemplate Main Manuscript IjnmsAmar AkbarNo ratings yet
- Group 5 Final Research Papers 12 VoltaireDocument46 pagesGroup 5 Final Research Papers 12 VoltaireJaypee AsoyNo ratings yet
- SIL Solver Pre-Installation Procedure v6 CombinedDocument7 pagesSIL Solver Pre-Installation Procedure v6 CombinedMarcio GranatoNo ratings yet
- In Spite of Advances Made in Agriculture, Many People Around The World Still Go Hungry - IELTS Writing Essay SampleDocument1 pageIn Spite of Advances Made in Agriculture, Many People Around The World Still Go Hungry - IELTS Writing Essay SampleGia NghiNo ratings yet
- Why Pymel?: The Nature of The BeastDocument4 pagesWhy Pymel?: The Nature of The BeastOzgur YildirimNo ratings yet
- 106638.1 Handling Rollback Segment CorruptionsDocument24 pages106638.1 Handling Rollback Segment Corruptionsfl512No ratings yet
- CSP-40, 41 & 11 AssignmentsDocument9 pagesCSP-40, 41 & 11 AssignmentsSagarika MishraNo ratings yet
- SHAPE Hard PDFDocument15 pagesSHAPE Hard PDFSean Joshua RamosNo ratings yet
- 1A Unit2 Part2Document46 pages1A Unit2 Part2Krystal SorianoNo ratings yet
- Basic Punctuation Marks PowerpointDocument12 pagesBasic Punctuation Marks PowerpointBelle Madreo100% (1)
- SAP Gateway ACL (Secinfo, Reginfo) Generator (10KBlaze Fix) - SAP BlogsDocument7 pagesSAP Gateway ACL (Secinfo, Reginfo) Generator (10KBlaze Fix) - SAP BlogsFahri BaturNo ratings yet
- Megillas Esther in Rashi ScriptDocument19 pagesMegillas Esther in Rashi ScriptShira Hochheimer100% (1)
- CentreWareWeb CWW 5.8 InstallationGuideDocument26 pagesCentreWareWeb CWW 5.8 InstallationGuidechrisban35No ratings yet
- SEO Audit Report For Abird - Co.ukDocument9 pagesSEO Audit Report For Abird - Co.uklsd_donkeyNo ratings yet
- Hualin1.1 Deeg Final PDFDocument33 pagesHualin1.1 Deeg Final PDFpeacelumbiniNo ratings yet
- (Cambridge Library Collection - Linguistics) Rasmus Rask-Über Das Alter Und Die Echtheit Der Zendsprache Und Des Zend-Avesta, Und Herstellung Des Zend-Alphabets Nebst Einer Übersicht Des Gesammten SPDocument95 pages(Cambridge Library Collection - Linguistics) Rasmus Rask-Über Das Alter Und Die Echtheit Der Zendsprache Und Des Zend-Avesta, Und Herstellung Des Zend-Alphabets Nebst Einer Übersicht Des Gesammten SPanniebmNo ratings yet
- Grammar Tenses, Prepositions & ComparisonDocument5 pagesGrammar Tenses, Prepositions & ComparisonFelipe MotaNo ratings yet
- ImagismDocument2 pagesImagismTahirullah KhanNo ratings yet
- PPL UNIT 1a PDFDocument11 pagesPPL UNIT 1a PDFsatya sriNo ratings yet
- Pronoun choicesDocument4 pagesPronoun choicesLaura Cisterne MatallanaNo ratings yet
- VAV Honeywell Tech SubmittalDocument1 pageVAV Honeywell Tech SubmittalMUHAMMED SHAFEEQNo ratings yet
- Class 5 AssignmentDocument13 pagesClass 5 Assignmentnajaf shanNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneFrom EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsFrom EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsRating: 4.5 out of 5 stars4.5/5 (49)
- 700 Best Kindle Fire Apps: Including the Top 500+ Free Apps!From Everand700 Best Kindle Fire Apps: Including the Top 500+ Free Apps!Rating: 4 out of 5 stars4/5 (1)
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersFrom Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersNo ratings yet
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesFrom EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesNo ratings yet