You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Earthquake Loads - NSCP 2015Document11 pagesEarthquake Loads - NSCP 2015Gloremay Ann Aleman100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Racecar Engineering June 2017Document101 pagesRacecar Engineering June 2017Big FloresNo ratings yet
- Potential of A Production DI Two-Stroke Engine Adapted For Range Extender and Motorcycle ApplicationsDocument24 pagesPotential of A Production DI Two-Stroke Engine Adapted For Range Extender and Motorcycle ApplicationsManuelLentiNo ratings yet
- Arcelormittal Pressure VesselDocument12 pagesArcelormittal Pressure VesselAnonymous UoHUagNo ratings yet
- En 228 PDFDocument11 pagesEn 228 PDFhugogeurdesNo ratings yet
- Positive Material IdentificationDocument12 pagesPositive Material IdentificationPrabhakar KattulaNo ratings yet
- Fem Mcqs AllDocument111 pagesFem Mcqs AllYatikNo ratings yet
- Supercritical Fluid Chromatography and ExtractionDocument20 pagesSupercritical Fluid Chromatography and ExtractionHenny Casanova100% (2)
- Technical Specification For Vacuum SystemsDocument284 pagesTechnical Specification For Vacuum SystemsUday SuleNo ratings yet
- UNIT 4 Raman Spectroscopy 12309Document24 pagesUNIT 4 Raman Spectroscopy 12309NathanianNo ratings yet
- GT-Power Exercise 2 Instructions - 2018Document15 pagesGT-Power Exercise 2 Instructions - 2018ManuelLentiNo ratings yet
- Power Process Simulation LE3Document4 pagesPower Process Simulation LE3ManuelLentiNo ratings yet
- Solids 8 - 4Document89 pagesSolids 8 - 4dppriya1984No ratings yet
- Learning Exercise 4 GT-Power/GT-Suite Simulation Exercises Part 2: Building Up A Simulation Model For A Turbocharged 6-Cylinder Diesel Engine (10p)Document3 pagesLearning Exercise 4 GT-Power/GT-Suite Simulation Exercises Part 2: Building Up A Simulation Model For A Turbocharged 6-Cylinder Diesel Engine (10p)ManuelLentiNo ratings yet
- DC Brushless Fan Specification ApprovalDocument16 pagesDC Brushless Fan Specification ApprovalManuelLentiNo ratings yet
- Compressors and Turbines 2018Document25 pagesCompressors and Turbines 2018ManuelLentiNo ratings yet
- Influence of Water Spray CFD Parameters on Simulation Results and TimeDocument15 pagesInfluence of Water Spray CFD Parameters on Simulation Results and TimeManuelLentiNo ratings yet
- Step-by-Step Resume Guide & Templates: O: o o o o o o o - o o o oDocument12 pagesStep-by-Step Resume Guide & Templates: O: o o o o o o o - o o o oManuelLentiNo ratings yet
- Italian Engine EvolutionDocument11 pagesItalian Engine EvolutionManuelLentiNo ratings yet
- Kul144400 QuestionsDocument1 pageKul144400 QuestionsManuelLentiNo ratings yet
- Jasper 1972Document169 pagesJasper 1972ManuelLentiNo ratings yet
- Di Workbook BarnesDocument19 pagesDi Workbook BarnesCesar CuenNo ratings yet
- E85Document58 pagesE85Kushal DhokareNo ratings yet
- BibliografiaDocument26 pagesBibliografiaManuelLentiNo ratings yet
- Example of QuestionsDocument1 pageExample of QuestionsManuelLentiNo ratings yet
- MP L00 - 02 - IET - Guide To Technical Writing PDFDocument18 pagesMP L00 - 02 - IET - Guide To Technical Writing PDFManuelLentiNo ratings yet
- Math Prerequisite: Advanced Automotive Engineering Automatic ControlsDocument9 pagesMath Prerequisite: Advanced Automotive Engineering Automatic ControlsManuelLentiNo ratings yet
- I18-09 Use of MBD For HV Efficient CalibrationDocument1 pageI18-09 Use of MBD For HV Efficient CalibrationManuelLentiNo ratings yet
- Chapter06.03 VehicleDynamicsDocument69 pagesChapter06.03 VehicleDynamicsManuelLentiNo ratings yet
- F1-Hollow Ti RodDocument3 pagesF1-Hollow Ti RodManuelLentiNo ratings yet
- Combustione Benzina 2015 2 CleanDocument22 pagesCombustione Benzina 2015 2 CleanManuelLentiNo ratings yet
- (Marco - Carricato.meccanica Delle Macchine M 2016-17) Chapter06.2.2 MultiDOF-Systems QuadcopterDocument39 pages(Marco - Carricato.meccanica Delle Macchine M 2016-17) Chapter06.2.2 MultiDOF-Systems QuadcopterManuelLenti100% (1)
- United States Patent ?ice: Patented Mar. 3, 1964Document3 pagesUnited States Patent ?ice: Patented Mar. 3, 1964ManuelLentiNo ratings yet
- United States Patent ?ice: Patented Mar. 3, 1964Document3 pagesUnited States Patent ?ice: Patented Mar. 3, 1964ManuelLentiNo ratings yet
- 10 1 1 126 3437 PDFDocument100 pages10 1 1 126 3437 PDFManuelLentiNo ratings yet
- 1-I Materiali CeramiciDocument41 pages1-I Materiali CeramiciManuelLentiNo ratings yet
- Motor Size SelectionDocument4 pagesMotor Size SelectionArnoah RamirezNo ratings yet
- IGEM - TD - 1 - Introduction & ScopeDocument18 pagesIGEM - TD - 1 - Introduction & ScopeEnrico ManfrinatoNo ratings yet
- Projectile Driving Band Interaction With Gun BarrelsDocument6 pagesProjectile Driving Band Interaction With Gun Barrelsjitendra25252No ratings yet
- Magneto Abrasive Flow MachiningDocument11 pagesMagneto Abrasive Flow MachiningBhuvnesh SinghNo ratings yet
- Rigid PavementDocument93 pagesRigid PavementArnold BiesNo ratings yet
- FlowControl Manual PDFDocument168 pagesFlowControl Manual PDFToyinNo ratings yet
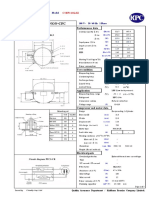
- C-BF 110L0Z PDFDocument3 pagesC-BF 110L0Z PDFWardi SupriadiNo ratings yet
- 15-Ktp PRR PipesDocument46 pages15-Ktp PRR PipesmohammedNo ratings yet
- Cast Alloys in Aluminium 2013Document16 pagesCast Alloys in Aluminium 2013Fernando Martinez ContrerasNo ratings yet
- Autonomous HVAC CFD - IntroductionDocument31 pagesAutonomous HVAC CFD - IntroductionPraveen Kumar RNo ratings yet
- Physics 1A Problem Set #5: Spring Forces and Ski Jump SpeedsDocument2 pagesPhysics 1A Problem Set #5: Spring Forces and Ski Jump Speedshthaier4062No ratings yet
- HT Tutorial 1 QuestionsDocument7 pagesHT Tutorial 1 QuestionssairamNo ratings yet
- Determining The Penetration of Chloride Ion Into Concrete by PondingDocument4 pagesDetermining The Penetration of Chloride Ion Into Concrete by PondingMarco RiveraNo ratings yet
- CV Highlights Mechanical EngineerDocument7 pagesCV Highlights Mechanical EngineerE.s. BinbillahNo ratings yet
- Equilibrium WorksheetDocument7 pagesEquilibrium WorksheetCJ RhodesNo ratings yet
- EuleDocument9 pagesEuleAnand Utsav KapoorNo ratings yet
- 1434621930963-C&W Corrosion Repairs PDFDocument103 pages1434621930963-C&W Corrosion Repairs PDFclementNo ratings yet
- Chemistry The Molecular Nature of Matter 7th Edition Jespersen Solutions ManualDocument22 pagesChemistry The Molecular Nature of Matter 7th Edition Jespersen Solutions Manualbeyradicantdays100% (30)
- AQA As Unit 2 Sample PageDocument34 pagesAQA As Unit 2 Sample Pagenchauhan2120% (1)
- Thermal Isolation of Encapsulated MEMS Resonators: Journal of Microelectromechanical Systems March 2008Document11 pagesThermal Isolation of Encapsulated MEMS Resonators: Journal of Microelectromechanical Systems March 2008AhmedNo ratings yet
- Lesson 2 Physical and Chemical Properties of MatterDocument3 pagesLesson 2 Physical and Chemical Properties of MatterAndrea MurielNo ratings yet
- Order of ReactionDocument11 pagesOrder of ReactionBadar RizwanNo ratings yet
- CH 8. Chemical Equilibrium (Chem +1)Document40 pagesCH 8. Chemical Equilibrium (Chem +1)Dipin Preet SinghNo ratings yet