You might also like
- PID CONTROLLERS EXPLAINEDDocument2 pagesPID CONTROLLERS EXPLAINEDBerkcan ArslanNo ratings yet
- Course Outline: DGU3073 Process Instrumentation & ControlDocument66 pagesCourse Outline: DGU3073 Process Instrumentation & ControlAaron ChinNo ratings yet
- Understanding PID Control Using a Process Control UnitDocument11 pagesUnderstanding PID Control Using a Process Control Unittk_atiqahNo ratings yet
- Modren Control: Prepared by The StudentDocument12 pagesModren Control: Prepared by The StudenthassanalabasiNo ratings yet
- Apc Term PaperDocument9 pagesApc Term PaperDarshan MalaniNo ratings yet
- Controls YsDocument17 pagesControls Ysbamboo shackNo ratings yet
- Unitvi Control SystemsDocument47 pagesUnitvi Control SystemsVishal SharmaNo ratings yet
- Introduction to Classical Control SystemsDocument30 pagesIntroduction to Classical Control SystemsRajasekhar AtlaNo ratings yet
- Control and Instrumentation Training Report: Kariba South Power StationDocument12 pagesControl and Instrumentation Training Report: Kariba South Power StationtrynoskNo ratings yet
- Pidcontrollers 150912140326 Lva1 App6892 PDFDocument18 pagesPidcontrollers 150912140326 Lva1 App6892 PDFKalyan TejaNo ratings yet
- Ce Mod1Document22 pagesCe Mod1AYUSH CHANDRANo ratings yet
- Open Closed Loop NotesDocument4 pagesOpen Closed Loop Notesm4yw6dtztjNo ratings yet
- Mechatronics Assignment - 1Document6 pagesMechatronics Assignment - 1SARTHAK JAINNo ratings yet
- Proportional Controller Benefits for Temperature ControlDocument2 pagesProportional Controller Benefits for Temperature ControlAli AshrafNo ratings yet
- Automation 2 Topic 1: Design A Simple Process Control SystemDocument12 pagesAutomation 2 Topic 1: Design A Simple Process Control SystemChriscarl De LimaNo ratings yet
- MEC 322 Introduction to Control Systems & InstrumentationDocument47 pagesMEC 322 Introduction to Control Systems & InstrumentationHaFiy HaZimNo ratings yet
- Department of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokDocument11 pagesDepartment of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokWalid AdnanNo ratings yet
- PID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015Document18 pagesPID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015aditee saxenaaNo ratings yet
- Experiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerDocument16 pagesExperiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerfahadfiazNo ratings yet
- Industry Automation and Drive Technologies Training ManualDocument36 pagesIndustry Automation and Drive Technologies Training ManualPop-Coman SimionNo ratings yet
- Chap 1Document22 pagesChap 1Marianah MasrieNo ratings yet
- LabExercise 9 - Dynamic Systems SimulationDocument16 pagesLabExercise 9 - Dynamic Systems SimulationQueenie Rose PercilNo ratings yet
- Name: Roll: Year: Department: Subject: Subject CodeDocument11 pagesName: Roll: Year: Department: Subject: Subject CodeMayukh BiswasNo ratings yet
- Unit No - II: Block Diagram RepresentationDocument56 pagesUnit No - II: Block Diagram RepresentationNamrta DeokateNo ratings yet
- EVMS Full Notes PDFDocument78 pagesEVMS Full Notes PDFNaveen DhanurajNo ratings yet
- Advantages and Disadvantages When Using DerivativeDocument3 pagesAdvantages and Disadvantages When Using DerivativeJumriani Salleh100% (1)
- Ipc PPT (Group 3) 7thDocument35 pagesIpc PPT (Group 3) 7thChemical engrNo ratings yet
- Control Engineering: HapterDocument45 pagesControl Engineering: Hapterkyaw phone htetNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enhiperboreoatlantecNo ratings yet
- PID CONTROLLER EXPERIMENTDocument13 pagesPID CONTROLLER EXPERIMENTMohd KhairiNo ratings yet
- Ee342 - Pid Controllers - 2020Document42 pagesEe342 - Pid Controllers - 2020ShadrackNo ratings yet
- Ipc PPT 7thDocument25 pagesIpc PPT 7thChemical engrNo ratings yet
- EIE 412 Note 1Document51 pagesEIE 412 Note 1John DavidNo ratings yet
- Report PIDDocument11 pagesReport PIDSaiman ShettyNo ratings yet
- Control LO4 - AnswerslDocument3 pagesControl LO4 - AnswerslYasir ButtNo ratings yet
- PID Lab HandoutDocument16 pagesPID Lab HandoutsteedNo ratings yet
- Control Strategy, Selective Control SystemDocument10 pagesControl Strategy, Selective Control SystemHutama Putra WibawaNo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enpetergoodingNo ratings yet
- Time response of controllersDocument5 pagesTime response of controllerskritika9014No ratings yet
- What Is A PID ControllerDocument11 pagesWhat Is A PID ControllerANRG Batch 11No ratings yet
- Group 6 report on automation controlDocument6 pagesGroup 6 report on automation controlCollim Hajime NivaledNo ratings yet
- AUTOMATION TITLEDocument279 pagesAUTOMATION TITLENandakishore PradeepNo ratings yet
- Lab 5 ReportDocument12 pagesLab 5 ReportMelaku DinkuNo ratings yet
- Control System EngineeringDocument95 pagesControl System EngineeringAbdulrahmanNo ratings yet
- Practical features of PID controllersDocument8 pagesPractical features of PID controllersGeorge MarkasNo ratings yet
- Controller Comparison Close Loop Control SystemDocument4 pagesController Comparison Close Loop Control SystemKristine SecoyaNo ratings yet
- PID ControllersDocument6 pagesPID ControllersNguyễn HảiNo ratings yet
- The Working Principle of A PID Controller For BeginnersDocument15 pagesThe Working Principle of A PID Controller For BeginnersSaber AbdelaalNo ratings yet
- Definition and Types of Control SystemsDocument6 pagesDefinition and Types of Control SystemsAdonis NicolasNo ratings yet
- App PIDDocument12 pagesApp PIDP Praveen KumarNo ratings yet
- Basic TheoryDocument5 pagesBasic TheoryzakiNo ratings yet
- Tarea2 Investigacion-Mcca-190090Document13 pagesTarea2 Investigacion-Mcca-190090Christian MendezNo ratings yet
- Close Loop Control Sys IntroDocument7 pagesClose Loop Control Sys IntroDwi Mulyanti DwimulyantishopNo ratings yet
- P, PI and PID ControlDocument3 pagesP, PI and PID ControlsivaNo ratings yet
- MEC322 Chapter 1Document59 pagesMEC322 Chapter 1Muhammad Irfan bin KhalmaizaNo ratings yet
- DC Servomotor Position Control Using PIDDocument7 pagesDC Servomotor Position Control Using PIDEnMaa 96No ratings yet
- Control Lab Project ReportDocument28 pagesControl Lab Project ReportDanyal QamarNo ratings yet
- Lecture Slides # 3Document11 pagesLecture Slides # 3AhmAd GhAziNo ratings yet
- PSE - Lecture 1 SlidesDocument36 pagesPSE - Lecture 1 SlidesAhmAd GhAziNo ratings yet
- Fire Prevention Strategies and Inerting TechniquesDocument32 pagesFire Prevention Strategies and Inerting TechniquesAhmAd GhAziNo ratings yet
- Vent Stack Feasibility Man Hrs Estimation - PROCESS SAFETYDocument15 pagesVent Stack Feasibility Man Hrs Estimation - PROCESS SAFETYAhmAd GhAziNo ratings yet
- H365540-100-230-0001 Gas Utilisation 0.5 FEED Study ReportDocument42 pagesH365540-100-230-0001 Gas Utilisation 0.5 FEED Study ReportAhmAd GhAziNo ratings yet
- A Manual Valve 9 001 PDFDocument24 pagesA Manual Valve 9 001 PDFAhmAd GhAziNo ratings yet
- AirValveforFireProtection - 6 1 18Document6 pagesAirValveforFireProtection - 6 1 18AhmAd GhAziNo ratings yet
- H365540-10-240-242-0001 Basis of Design - Rev BDocument52 pagesH365540-10-240-242-0001 Basis of Design - Rev BAhmAd GhAziNo ratings yet
- Development of A High-Productivity, Halophilic, Thermotolerant Microalga Picochlorum RenovoDocument9 pagesDevelopment of A High-Productivity, Halophilic, Thermotolerant Microalga Picochlorum RenovoAhmAd GhAziNo ratings yet
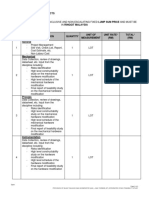
- EXHIBIT III - CONTRACT PRICE Feasibility Study R4Document2 pagesEXHIBIT III - CONTRACT PRICE Feasibility Study R4AhmAd GhAziNo ratings yet
- Vent Stack Feasibility Man Hrs EstimationDocument16 pagesVent Stack Feasibility Man Hrs EstimationAhmAd GhAziNo ratings yet
- Development of A High-Productivity, Halophilic, Thermotolerant Microalga Picochlorum RenovoDocument9 pagesDevelopment of A High-Productivity, Halophilic, Thermotolerant Microalga Picochlorum RenovoAhmAd GhAziNo ratings yet
- EXHIBIT I - SCOPE OF WORKS Feasibility Study R4Document3 pagesEXHIBIT I - SCOPE OF WORKS Feasibility Study R4AhmAd GhAziNo ratings yet
- MLNG Tiga Stack Feasibility Study 150223Document9 pagesMLNG Tiga Stack Feasibility Study 150223AhmAd GhAziNo ratings yet
- MOSFET Lab ExperimentsDocument19 pagesMOSFET Lab ExperimentsbilluzakNo ratings yet
- MOSFET Lab ExperimentsDocument19 pagesMOSFET Lab ExperimentsbilluzakNo ratings yet
- List of ContentsDocument23 pagesList of ContentsAhmAd GhAziNo ratings yet
- CRM03d Sales Case Study Opportunity ManagementDocument19 pagesCRM03d Sales Case Study Opportunity ManagementAhmAd GhAziNo ratings yet
- Advanced Thermodynamics Project No II (20 % Marks) Solution ThermodynamicsDocument1 pageAdvanced Thermodynamics Project No II (20 % Marks) Solution ThermodynamicsAhmAd GhAziNo ratings yet
- Experimetal Values Of Liquid Phase Properties P (Kpa) X1 Y1 X2 Y2 Γ1Document5 pagesExperimetal Values Of Liquid Phase Properties P (Kpa) X1 Y1 X2 Y2 Γ1AhmAd GhAziNo ratings yet
- Practical TestDocument3 pagesPractical TestAhmAd GhAziNo ratings yet
- Experimetal Values Of Liquid Phase Properties P (Kpa) X1 Y1 X2 Y2 Γ1Document4 pagesExperimetal Values Of Liquid Phase Properties P (Kpa) X1 Y1 X2 Y2 Γ1AhmAd GhAziNo ratings yet
- Experimetal Values Of Liquid Phase Properties P (Kpa) X1 Y1 X2 Y2 Γ1Document4 pagesExperimetal Values Of Liquid Phase Properties P (Kpa) X1 Y1 X2 Y2 Γ1AhmAd GhAziNo ratings yet
- Advanced Thermodynamics Project II Solution ThermodynamicsDocument1 pageAdvanced Thermodynamics Project II Solution ThermodynamicsAhmAd GhAziNo ratings yet
- Experimetal Values Of Liquid Phase Properties P (Kpa) X1 Y1 X2 Y2 Γ1Document4 pagesExperimetal Values Of Liquid Phase Properties P (Kpa) X1 Y1 X2 Y2 Γ1AhmAd GhAziNo ratings yet
- Cover Project#2Document1 pageCover Project#2AhmAd GhAziNo ratings yet
- CRM04b Service Case Study Service ManagementDocument27 pagesCRM04b Service Case Study Service ManagementAhmAd GhAziNo ratings yet
- Otal 18 Marks) : Type Your Answer in The Space ProvidedDocument9 pagesOtal 18 Marks) : Type Your Answer in The Space ProvidedAhmAd GhAziNo ratings yet
- List of ContentsDocument23 pagesList of ContentsAhmAd GhAziNo ratings yet
- Student Name: ID Number: 2002572 Instructor Name: Dr. Sharif F Zaman. Submission Date: 17/4/2021Document1 pageStudent Name: ID Number: 2002572 Instructor Name: Dr. Sharif F Zaman. Submission Date: 17/4/2021AhmAd GhAziNo ratings yet
- Palawan Mining Firms Fail Nationality Test Due to Canadian Parent CompanyDocument2 pagesPalawan Mining Firms Fail Nationality Test Due to Canadian Parent CompanyFaith Marie Borden100% (2)
- sjzl20092663-ZXDU68T301 (V4.1R01M01) Installation Manual PDFDocument81 pagessjzl20092663-ZXDU68T301 (V4.1R01M01) Installation Manual PDFRamiz3zNo ratings yet
- 33Document17 pages33ahases123No ratings yet
- Lab SessionDocument17 pagesLab SessionJagadeesh KumarNo ratings yet
- Pilot A2, CE2 Service Manual PDFDocument138 pagesPilot A2, CE2 Service Manual PDFKittiwat WongsuwanNo ratings yet
- Aspectsofproductionspart1 1Document41 pagesAspectsofproductionspart1 1Michelle Melody OlivarNo ratings yet
- EGM - Info FW Fächer SS21 - MoodleDocument9 pagesEGM - Info FW Fächer SS21 - MoodleAjay Kumar RamnaniNo ratings yet
- Subject: Biochemistry Topic:Lipid Metabolism 2 Lecturer: Dr. Laygo DATE: NOV. 2010Document11 pagesSubject: Biochemistry Topic:Lipid Metabolism 2 Lecturer: Dr. Laygo DATE: NOV. 2010Std DlshsiNo ratings yet
- Nortel GSM Counters and MetricsDocument38 pagesNortel GSM Counters and Metricsadnan80_742No ratings yet
- Matlab Signal ProcessingDocument418 pagesMatlab Signal ProcessingNguyễn Kiến Long91% (11)
- Workers VocabDocument12 pagesWorkers VocabSarah ZhaoNo ratings yet
- 0021 PDFDocument1 page0021 PDFDejan JanevNo ratings yet
- Conference ScheduleDocument19 pagesConference SchedulePurvik JoshiNo ratings yet
- Diocletian Palace Split OrnamentsDocument3 pagesDiocletian Palace Split OrnamentsPandexaNo ratings yet
- Exploiting 9-Win32 Shellcoding (By Corelanc0d3r)Document59 pagesExploiting 9-Win32 Shellcoding (By Corelanc0d3r)RobertoNo ratings yet
- DID 180 Standard Roller Chain: Roller Chains For Power TransmissionDocument1 pageDID 180 Standard Roller Chain: Roller Chains For Power TransmissionJhampol Rosales MuñozNo ratings yet
- 65° Panel Antenna: General SpecificationsDocument2 pages65° Panel Antenna: General SpecificationsAnnBliss100% (2)
- HDocument6 pagesHJohn ManciaNo ratings yet
- Iso9001 AsmeDocument2 pagesIso9001 AsmeAnonymous wKvJXBJ2iNo ratings yet
- Astero E0201E-20 991063Document186 pagesAstero E0201E-20 991063Thinh Nguyen100% (1)
- Answer Sheet Grade 12 Online/BlendedDocument3 pagesAnswer Sheet Grade 12 Online/BlendedMark Earvin CervantesNo ratings yet
- Deutz Inside 2 2014 en WebDocument19 pagesDeutz Inside 2 2014 en WebDaniel DaiaNo ratings yet
- Physics Blue Print I Puc 2023-24 PDFDocument2 pagesPhysics Blue Print I Puc 2023-24 PDFPrakash ReddyNo ratings yet
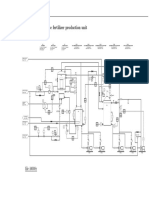
- Diagrama P ID Ammonium Nitrate Fertilizer Production Unit PDFDocument1 pageDiagrama P ID Ammonium Nitrate Fertilizer Production Unit PDFYecid Fabian AlvaradoNo ratings yet
- MODULE 1: Parts and Functions of Computers Basic Parts of ComputerDocument31 pagesMODULE 1: Parts and Functions of Computers Basic Parts of ComputerSophia Shannon D. DeiparineNo ratings yet
- WetterHaugstetter 2006Document8 pagesWetterHaugstetter 2006DiegoNo ratings yet
- Army Recruiting News Jun-Jul 1925Document32 pagesArmy Recruiting News Jun-Jul 1925CAP History LibraryNo ratings yet
- Dissertation PDFDocument45 pagesDissertation PDFMiguel GarcíaNo ratings yet
- Business Math Module 3Document22 pagesBusiness Math Module 3Mary Rose BuenaflorNo ratings yet
- CH 03Document10 pagesCH 03Qassem MohaidatNo ratings yet