You might also like
- Model Gravity Flow TankDocument11 pagesModel Gravity Flow TankTiar_Rahman_9553No ratings yet
- DC Motor Bidirectional Speed Control Using PWM PDFDocument5 pagesDC Motor Bidirectional Speed Control Using PWM PDFM Rameez Ur Rehman100% (1)
- 3 The TTL NAND GateDocument7 pages3 The TTL NAND Gateanupamj4u0% (1)
- Report On 4x1 MultiplexerDocument17 pagesReport On 4x1 MultiplexerPRAVEEN KUMAWATNo ratings yet
- Pic16f877a Practical ProgramsDocument39 pagesPic16f877a Practical ProgramsBarath IyerNo ratings yet
- Clock Domain Crossing Design and ValidationDocument12 pagesClock Domain Crossing Design and Validationarunsrl100% (1)
- PIC18F4550 I2C - PIC ControllersDocument8 pagesPIC18F4550 I2C - PIC ControllersKrishanu Modak100% (1)
- Embedded Systems ReportDocument86 pagesEmbedded Systems ReportGulati Rohit100% (1)
- UARTDocument34 pagesUARTMohit Dayal67% (3)
- Ultrasonic Rangefinder Using 8051Document25 pagesUltrasonic Rangefinder Using 8051Kaos Polos Nakira50% (4)
- Troubleshoot Ethernet IssuesDocument11 pagesTroubleshoot Ethernet Issuesmrigank shekhar100% (1)
- Introduction To Embedded SystemsDocument33 pagesIntroduction To Embedded Systemscharanpreetg1100% (1)
- LCD 16X2 AsmDocument20 pagesLCD 16X2 AsmEduardo FP100% (1)
- Fixed Point Adder VerilogDocument11 pagesFixed Point Adder VerilogUday A Korat100% (1)
- FSM in VHDLDocument10 pagesFSM in VHDLkunalsekhri123No ratings yet
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDocument28 pagesAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Signals and Slots in C++ ExplainedDocument10 pagesSignals and Slots in C++ ExplainedDon Camillo100% (1)
- Brushless DC Electric Motor Control by CPLDDocument6 pagesBrushless DC Electric Motor Control by CPLDIonela100% (3)
- Embedded SystemDocument28 pagesEmbedded SystemDevon Buckley86% (7)
- 5.2 PWM 7 Mac 2017Document34 pages5.2 PWM 7 Mac 2017Elawarasi Nadarajan100% (1)
- Implementing A Bootloader For The PIC16F87X: OperationDocument24 pagesImplementing A Bootloader For The PIC16F87X: Operationboslim1580100% (1)
- STM32 RS-485Document12 pagesSTM32 RS-485mail87523No ratings yet
- Set an 18ms interrupt period using PIC Timer 0Document3 pagesSet an 18ms interrupt period using PIC Timer 0f.last100% (1)
- The D Flip FlopDocument7 pagesThe D Flip FlopAlinChanNo ratings yet
- Laboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsDocument18 pagesLaboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsNguyễn HưngNo ratings yet
- CH372DS1Document15 pagesCH372DS1dds94100% (2)
- How To Interfacing Sensor With LPC2148 ARMDocument8 pagesHow To Interfacing Sensor With LPC2148 ARMSubir MaityNo ratings yet
- I - o Programming in 8051 CDocument6 pagesI - o Programming in 8051 CNaresh Ram SurisettiNo ratings yet
- VHDL Code For 4-Bit Shift RegisterDocument17 pagesVHDL Code For 4-Bit Shift RegisterAnónimo AnónimoNo ratings yet
- LCD 16 X 2Document9 pagesLCD 16 X 2Pradeev Balakrishnan100% (1)
- Generate PWM Signals Using a PIC 16F84 MicrocontrollerDocument5 pagesGenerate PWM Signals Using a PIC 16F84 Microcontrollersaadettin100% (2)
- Schematic Diagrams: Special NoteDocument12 pagesSchematic Diagrams: Special NoteAlexandre S. Corrêa100% (1)
- Makalah CPU Dan StorageDocument9 pagesMakalah CPU Dan StorageAdi SuripiyantoNo ratings yet
- Gaussian Random Number Generator Using Boxmuller MethodDocument27 pagesGaussian Random Number Generator Using Boxmuller MethodAbhijeet Singh KatiyarNo ratings yet
- Lecture 10 - InterruptsDocument19 pagesLecture 10 - InterruptsMichele Oconnor100% (2)
- Source. The Key To Oscillator Operation Is Positive Feedback. A Positive FeedbackDocument11 pagesSource. The Key To Oscillator Operation Is Positive Feedback. A Positive FeedbackDrLaxya Singla100% (1)
- DSP Lab 7 To 12Document75 pagesDSP Lab 7 To 12Abdul BasitNo ratings yet
- Assignment4 PDFDocument9 pagesAssignment4 PDFlavishNo ratings yet
- Avr TutorialDocument53 pagesAvr TutorialRakesh Kumar100% (1)
- Speed of Control of Motor Arduino Matlab Simulation PDFDocument10 pagesSpeed of Control of Motor Arduino Matlab Simulation PDFvince kafuaNo ratings yet
- VHDL Digital NAND Gate Program.Document14 pagesVHDL Digital NAND Gate Program.Muchamad Aldi AnantaNo ratings yet
- VHDL KeypadDocument17 pagesVHDL Keypadtroid426No ratings yet
- RS232 FinalcodeDocument9 pagesRS232 FinalcodeAsif BuddhaNo ratings yet
- PIC 16F877 CCP Modules for PWM, Capture & Compare ModesDocument8 pagesPIC 16F877 CCP Modules for PWM, Capture & Compare ModesPrabhu Parames100% (1)
- The Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetDocument6 pagesThe Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetRupesh Kumar100% (1)
- PWMDocument57 pagesPWMAhmed Mortuza Saleque SaikotNo ratings yet
- PIC Microcontroller 7-Segment Display CodeDocument23 pagesPIC Microcontroller 7-Segment Display CodeArnela Tatic100% (1)
- 8051 Interfacing With Display SevicesDocument5 pages8051 Interfacing With Display Sevicesramjee26100% (1)
- Stepper Motor: Free !Document2 pagesStepper Motor: Free !carlos augusto do carmo braia100% (1)
- ARM Cortex M3 Based Collision Detection SystemDocument3 pagesARM Cortex M3 Based Collision Detection SystemseventhsensegroupNo ratings yet
- Avr C Timer0 PDFDocument9 pagesAvr C Timer0 PDFNicolás Ferrario100% (1)
- H-Bridge: 4.1 DefinitionDocument11 pagesH-Bridge: 4.1 DefinitionJunaid Iftikhar100% (1)
- Dijsktra ThesisDocument65 pagesDijsktra ThesisGupta AakashNo ratings yet
- What Is An FPGA?: Figure 1: FPGA Block StructureDocument10 pagesWhat Is An FPGA?: Figure 1: FPGA Block Structureacer551100% (1)
- ECE545 Lecture5 Dataflow 6Document15 pagesECE545 Lecture5 Dataflow 6Utpal DasNo ratings yet
- Programming in CDocument56 pagesProgramming in CJazz Virak100% (1)
- Pic Based PLCDocument21 pagesPic Based PLCWaqas Maqsud100% (1)
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionFrom EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo ratings yet
- Realtime Pacer LicenseDocument1 pageRealtime Pacer LicensesunilkumareceNo ratings yet
- Clk1Hz PadDocument8 pagesClk1Hz PadframqzNo ratings yet
- Consumo OilDocument1 pageConsumo OilframqzNo ratings yet
- Readme ArduinoDocument12 pagesReadme ArduinoSyahrun ZahierNo ratings yet
- Touchscreen AN014 V5Document9 pagesTouchscreen AN014 V5Bentar ELcNo ratings yet
- WT5001Document16 pagesWT5001animenesNo ratings yet
- Connecting an ATmega8 microcontroller to a development boardDocument1 pageConnecting an ATmega8 microcontroller to a development boardframqz100% (1)
- LicenseDocument1 pageLicenseframqzNo ratings yet
- Datasheet Chip LCD Ili9341 PDFDocument245 pagesDatasheet Chip LCD Ili9341 PDFframqzNo ratings yet
- Advance Information: 128 X 64 Dot Matrix OLED/PLED Segment/Common Driver With ControllerDocument65 pagesAdvance Information: 128 X 64 Dot Matrix OLED/PLED Segment/Common Driver With ControllerKrishna Sg100% (1)
- AoutDocument1 pageAoutframqzNo ratings yet
- FRDM k64f Pinnames - MbedDocument2 pagesFRDM k64f Pinnames - MbedframqzNo ratings yet
- LedMatrix Font 5x7 ColDocument3 pagesLedMatrix Font 5x7 ColframqzNo ratings yet
- Latch D PadDocument8 pagesLatch D PadframqzNo ratings yet
- CLK 1 HZDocument2 pagesCLK 1 HZframqzNo ratings yet
- frdm-k64f Er Rev2Document7 pagesfrdm-k64f Er Rev2framqzNo ratings yet
- FRDM k64f Pinnames - MbedDocument2 pagesFRDM k64f Pinnames - MbedframqzNo ratings yet
- Corporate Bridge Internship ProposalDocument5 pagesCorporate Bridge Internship ProposalHBhatlaNo ratings yet
- BK - Scrum and CMMIDocument132 pagesBK - Scrum and CMMIcoolgoroNo ratings yet
- Assignment OracleDocument4 pagesAssignment OracleKyle Austin PabustanNo ratings yet
- Design of Miniature Maglev Using Hybrid MagnetsDocument4 pagesDesign of Miniature Maglev Using Hybrid MagnetsErmin FazlicNo ratings yet
- wndw3 Print PDFDocument520 pageswndw3 Print PDFbryanth9No ratings yet
- Sat - RPMSDocument4 pagesSat - RPMSAeroz RednaxelaNo ratings yet
- Google Earth y Civil CadDocument3 pagesGoogle Earth y Civil CadRodneyNo ratings yet
- Waterfall Model - The Original Software Development Process ModelDocument3 pagesWaterfall Model - The Original Software Development Process ModelmushfiqNo ratings yet
- Champion 700 Series Motor Grader Series I Operators Manual Revision 1 8-24-1977 PDFDocument54 pagesChampion 700 Series Motor Grader Series I Operators Manual Revision 1 8-24-1977 PDFjulianmata77% (13)
- MAIN Electrical Parts List: Parts Code Design LOC DescriptionDocument22 pagesMAIN Electrical Parts List: Parts Code Design LOC DescriptionJerzy DziewiczkiewiczNo ratings yet
- Manufacturing Technology (ME461) Lecture1Document39 pagesManufacturing Technology (ME461) Lecture1Rishabh JainNo ratings yet
- Easi-Pay Guide via e-ConnectDocument29 pagesEasi-Pay Guide via e-ConnectKok WaiNo ratings yet
- Accenture Inside Corporate MandADocument28 pagesAccenture Inside Corporate MandAshshanksNo ratings yet
- KANSAS CITY Hyatt Regency Hotel Walkways CollapseDocument8 pagesKANSAS CITY Hyatt Regency Hotel Walkways CollapseRafran RoslyNo ratings yet
- Slabs Are Plate Elements Forming Floors andDocument5 pagesSlabs Are Plate Elements Forming Floors andyasas89No ratings yet
- MG585 Set Up and Service ManualDocument16 pagesMG585 Set Up and Service Manualoscar albertoNo ratings yet
- By Himanshu Panwar Asst. Prof. Civil Engineering Department AkgecDocument34 pagesBy Himanshu Panwar Asst. Prof. Civil Engineering Department AkgecAlok0% (1)
- Mario Stifano Graphic Designer CVDocument1 pageMario Stifano Graphic Designer CVmariostifanoNo ratings yet
- BUK9Y53-100B DatasheetDocument12 pagesBUK9Y53-100B Datasheetisomeso21No ratings yet
- 2007 Output Stops RemovedDocument45 pages2007 Output Stops RemovedAisyah DzulqaidahNo ratings yet
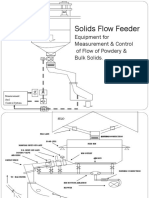
- Solids Flow Feeder Equipment for Precise Measurement & ControlDocument7 pagesSolids Flow Feeder Equipment for Precise Measurement & ControlAbhishek DuttaNo ratings yet
- MCQ - QuestionsTM P-1 PDFDocument8 pagesMCQ - QuestionsTM P-1 PDFRislan MohammedNo ratings yet
- Ticketreissue PDFDocument61 pagesTicketreissue PDFnicoNicoletaNo ratings yet
- L .. Eee - .: Distribution Voltage RegulatorsDocument11 pagesL .. Eee - .: Distribution Voltage RegulatorsSirajulNo ratings yet
- Aztech+700WR-3G User ManualDocument57 pagesAztech+700WR-3G User Manualkero_the_hero67% (3)
- Fuzzy Set Theory: UNIT-2Document45 pagesFuzzy Set Theory: UNIT-2Sharma SudhirNo ratings yet
- The Device Is Running PDFDocument22 pagesThe Device Is Running PDFBint MustaphaNo ratings yet
- OBJECTIVES QUESTIONS RESISTIVITYDocument3 pagesOBJECTIVES QUESTIONS RESISTIVITYPankaj Kumar SinghNo ratings yet
- LCD panel and module replacement parts for saleDocument1 pageLCD panel and module replacement parts for saleValeria bolañosNo ratings yet
- Qtiplot Manual enDocument390 pagesQtiplot Manual enjovita georgeNo ratings yet