You might also like
- Stepper and Servo MotorDocument5 pagesStepper and Servo Motorகோகுல்நாத் ஸ்ரீ கிNo ratings yet
- Controls InstrumentationDocument245 pagesControls InstrumentationFreddy Yánez100% (1)
- 33 11KV Substation SLDDocument3 pages33 11KV Substation SLDRajeshYadav100% (1)
- Process AuxillariesDocument58 pagesProcess AuxillariesHarsh ParmarNo ratings yet
- Stepper Motors ExplainedDocument13 pagesStepper Motors ExplainedGurwinder Singh100% (1)
- Everything about Servo MotorsDocument31 pagesEverything about Servo Motorsadiamiru25% (4)
- Fundamentals of Engineering Exam Sample Math Questions: X z+6 zx+6 ZDocument9 pagesFundamentals of Engineering Exam Sample Math Questions: X z+6 zx+6 ZinspectorsufiNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorGanesh Pingle100% (1)
- Effect of Temperature and Pressure On The DensityDocument7 pagesEffect of Temperature and Pressure On The DensityDrSaurabh TewariNo ratings yet
- Servo MotorsDocument8 pagesServo MotorsFairos ZakariahNo ratings yet
- Servo Motor Guide: Types, Construction & ApplicationsDocument7 pagesServo Motor Guide: Types, Construction & ApplicationsAHMED YOUSEFNo ratings yet
- Permanent Magnet Brushless DC MotorDocument7 pagesPermanent Magnet Brushless DC MotoratultiwarihinduNo ratings yet
- Servo Motor Selection For UAVDocument9 pagesServo Motor Selection For UAVUAV Society100% (1)
- Paradeep Refinery Project: A Sunrise Project For A Sunshine FutureDocument35 pagesParadeep Refinery Project: A Sunrise Project For A Sunshine Futuremujeebtalib80% (5)
- Understanding Servo MotorsDocument103 pagesUnderstanding Servo MotorsQasir NawazNo ratings yet
- Oil & Gas Financial JourneyDocument85 pagesOil & Gas Financial Journeyabsolutvacio82No ratings yet
- Stepper Motor Drive System for Robotic ApplicationsDocument11 pagesStepper Motor Drive System for Robotic ApplicationsPrerith Subramanya100% (2)
- Motor Technologies: The Hybrid ServoDocument1 pageMotor Technologies: The Hybrid ServoOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- An Extensive Look On Servo and Stepper MotorDocument12 pagesAn Extensive Look On Servo and Stepper MotorsajhfhfsjaNo ratings yet
- Servo MotorDocument4 pagesServo MotorWasil BabarNo ratings yet
- RBE(H) Series Brushless Motors Data SheetDocument44 pagesRBE(H) Series Brushless Motors Data SheetKOMATSU SHOVELNo ratings yet
- RBE Series Motors Brochure en-US 2003Document44 pagesRBE Series Motors Brochure en-US 2003derribo78No ratings yet
- Motor Sincrono SYNCGUIDEDocument48 pagesMotor Sincrono SYNCGUIDEluisfilipeminenervaNo ratings yet
- Stepper Motor Basics: A Guide to Understanding Fundamentals and ApplicationsDocument11 pagesStepper Motor Basics: A Guide to Understanding Fundamentals and ApplicationsrvpilotNo ratings yet
- Closed Loop Control of Stepper Motor Without Position SensorDocument9 pagesClosed Loop Control of Stepper Motor Without Position SensorlamushkNo ratings yet
- Stepper MotorDocument25 pagesStepper Motorhemamanikumar100% (1)
- System Basics: Delta Precision Motors LTDDocument10 pagesSystem Basics: Delta Precision Motors LTDnycknikkiNo ratings yet
- Introduction Robot Drive SystemsDocument17 pagesIntroduction Robot Drive SystemsTemesgen100% (2)
- Unit Ii PDFDocument17 pagesUnit Ii PDFManojKumar MNo ratings yet
- Variable Reluctance MotorDocument14 pagesVariable Reluctance MotorgbksnNo ratings yet
- Q4 Electro Stepper and Servo (Research)Document2 pagesQ4 Electro Stepper and Servo (Research)Kim SalvadorNo ratings yet
- Unit-II: Robot Drive Systems and End EffectorsDocument81 pagesUnit-II: Robot Drive Systems and End EffectorsSatheesh KumarNo ratings yet
- Robot Drive Systems and End Effectors GuideDocument84 pagesRobot Drive Systems and End Effectors GuideSatheesh KumarNo ratings yet
- AmanDocument19 pagesAmanGirijesh Yadav0% (1)
- Answer For QuestionDocument4 pagesAnswer For QuestionMohd AmerNo ratings yet
- Shaded Pole Induction MotorDocument7 pagesShaded Pole Induction MotorRahul BhumkarNo ratings yet
- Arbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorDocument12 pagesArbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorEphrem DanielNo ratings yet
- STEPPER MOTOR GUIDEDocument10 pagesSTEPPER MOTOR GUIDEMohammed SiddiqueNo ratings yet
- RBE Series Motors Brochure en-US 2003 1Document44 pagesRBE Series Motors Brochure en-US 2003 1Animesh GhoshNo ratings yet
- Subject: Electrical Machine - 2 (VTH Sem B-20) Subject: Electrical Machine - 2 (VTH Sem B-20)Document21 pagesSubject: Electrical Machine - 2 (VTH Sem B-20) Subject: Electrical Machine - 2 (VTH Sem B-20)virprakashNo ratings yet
- Electrical Actuation SystemDocument8 pagesElectrical Actuation SystemShriyash KamatNo ratings yet
- Performance Characteristics of Servo and Stepper MotorsDocument3 pagesPerformance Characteristics of Servo and Stepper MotorsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Differences Between Stepper Motors and Servo MotorsDocument1 pageDifferences Between Stepper Motors and Servo MotorsazharzebNo ratings yet
- DifferenceDocument3 pagesDifferencemoh300No ratings yet
- Brushless Servo MotorsDocument4 pagesBrushless Servo MotorsServomotores SimairNo ratings yet
- SERVO MOTORS: Structure, Types, Applications and MoreDocument22 pagesSERVO MOTORS: Structure, Types, Applications and MoreJavierNo ratings yet
- Brushless DC Electric Motor: Fundamentals of OperationDocument12 pagesBrushless DC Electric Motor: Fundamentals of OperationRaffi SkNo ratings yet
- Unit Ii Robot Drive Systems and End Effectors.Document11 pagesUnit Ii Robot Drive Systems and End Effectors.Akash PrasanthNo ratings yet
- MotorsDocument10 pagesMotorskumiho_warriorNo ratings yet
- Technical Note: What Is A VFD?Document4 pagesTechnical Note: What Is A VFD?mdkhandaveNo ratings yet
- Reluctance MotorDocument27 pagesReluctance MotorMax Sedric L LaylayNo ratings yet
- Stepper & Servo: Pros & Cons: Drawing Courtesy of National InstrumentsDocument5 pagesStepper & Servo: Pros & Cons: Drawing Courtesy of National Instrumentsmvcky2008No ratings yet
- Instrumenttatinblog ServomotorDocument7 pagesInstrumenttatinblog ServomotorSpahic27No ratings yet
- Two phase AC servomotor guideDocument6 pagesTwo phase AC servomotor guideMARADANA SUDEERNo ratings yet
- Unit I (SM) PDFDocument89 pagesUnit I (SM) PDFshiva sai donthulaNo ratings yet
- Drive Systems and Motors Explained for ElevatorsDocument21 pagesDrive Systems and Motors Explained for ElevatorsAjay MedikondaNo ratings yet
- EEE-UNIT 3 Machines and DrivesDocument54 pagesEEE-UNIT 3 Machines and DrivesSano ManjiroNo ratings yet
- Motor Description: Esp System - Subsurface Components 2 T P I M 2Document11 pagesMotor Description: Esp System - Subsurface Components 2 T P I M 2Yan MALONGANo ratings yet
- Content of Report Investigation of The Stepper MotorDocument12 pagesContent of Report Investigation of The Stepper MotorGiulio LicitraNo ratings yet
- Servo MotorDocument17 pagesServo MotorAswathy SimonNo ratings yet
- Types of Stepper MotorDocument6 pagesTypes of Stepper MotorFazal Aziz WaliNo ratings yet
- Stepper Motor: From Wikipedia, The Free EncyclopediaDocument42 pagesStepper Motor: From Wikipedia, The Free EncyclopediaJoeson RosarioNo ratings yet
- DC, Servo & Stepper Motors ExplainedDocument2 pagesDC, Servo & Stepper Motors ExplainedidatscribdNo ratings yet
- Brushless Servomotor: Presented byDocument16 pagesBrushless Servomotor: Presented byDev KumarNo ratings yet
- Kollmorgen BMS Large Dia Frameless Motors 230712Document17 pagesKollmorgen BMS Large Dia Frameless Motors 230712Arun Chand C VNo ratings yet
- Infant Monitoring System Using Co2 Sensor-Project ReportDocument59 pagesInfant Monitoring System Using Co2 Sensor-Project ReportRajesh Kumar0% (1)
- 30Document6 pages30koushikNo ratings yet
- Ub Processengineer 20150424 PDFDocument1 pageUb Processengineer 20150424 PDFOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- PT. at IndonesiaDocument2 pagesPT. at IndonesiaOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- LVDTDocument2 pagesLVDTOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Solar Power Systems Web Monitoring PDFDocument5 pagesSolar Power Systems Web Monitoring PDFOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Application of Expert Systems in Co-Ordinated ControlDocument4 pagesApplication of Expert Systems in Co-Ordinated ControlOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Application of Expert Systems in Co-Ordinated ControlDocument4 pagesApplication of Expert Systems in Co-Ordinated ControlOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Form CV Krakatau PoscoDocument1 pageForm CV Krakatau PoscoOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- A High-Current Low-Voltage DC Power SupplyDocument5 pagesA High-Current Low-Voltage DC Power SupplyOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Interfacing Digital Hall Effect SensorsDocument1 pageInterfacing Digital Hall Effect SensorsOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Hybrid Algorithm of Chaos Optimisation and SLPDocument5 pagesHybrid Algorithm of Chaos Optimisation and SLPOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Optimal Interpolating Windowed Discrete Fourier TransformDocument5 pagesOptimal Interpolating Windowed Discrete Fourier TransformOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Improvement of Internal Charging Current CompensationDocument4 pagesImprovement of Internal Charging Current CompensationOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Neural Network Based Digital Differential RelayDocument6 pagesNeural Network Based Digital Differential RelayOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Flux-Based Current-Differential Relay For PowerDocument4 pagesFlux-Based Current-Differential Relay For PowerOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Applications of Digital Differential ProtectionDocument4 pagesApplications of Digital Differential ProtectionOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Syllabus For Instrumentation Engineering (IN) : Linear AlgebraDocument3 pagesSyllabus For Instrumentation Engineering (IN) : Linear AlgebraOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Flux-Based Current-Differential Relay For PowerDocument4 pagesFlux-Based Current-Differential Relay For PowerOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Photovoltaic Systems For Rural Communities in IndonesiaDocument5 pagesPhotovoltaic Systems For Rural Communities in IndonesiaOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Influence of Tropical Monsoon and Local Wind Circulation To GeDocument4 pagesInfluence of Tropical Monsoon and Local Wind Circulation To GeOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Intelligent Network in IndonesiaDocument6 pagesIntelligent Network in IndonesiaOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Instrumentation Engineering SyllabusDocument3 pagesInstrumentation Engineering SyllabusOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Human Impedance at 50 KHZ For Analysis of Acupuncture PointsDocument1 pageHuman Impedance at 50 KHZ For Analysis of Acupuncture PointsOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- PT Telkom Results On Field Tests of Asymmetric DiDocument4 pagesPT Telkom Results On Field Tests of Asymmetric DiOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- HTML Dan CSSDocument48 pagesHTML Dan CSSdeserverNo ratings yet
- CPPDocument2 pagesCPPOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Exam Specifications - PE Control Systems Oct 2011Document4 pagesExam Specifications - PE Control Systems Oct 2011transvinny2010No ratings yet
- NEST 2013 Question Paper Final AnswersDocument2 pagesNEST 2013 Question Paper Final AnswersOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- TCA7Document1 pageTCA7choirul dwiNo ratings yet
- Green Worcester PlanDocument46 pagesGreen Worcester PlanMichael ElflandNo ratings yet
- Busway SpecificationDocument6 pagesBusway SpecificationNATHANNo ratings yet
- Boq - Sewer Pump Station Example: Project Name, Town Tender NoDocument8 pagesBoq - Sewer Pump Station Example: Project Name, Town Tender Nodelovan cheikhoNo ratings yet
- Internship ReportDocument58 pagesInternship ReportSamay Dhirwani100% (1)
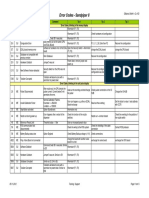
- Training Document: 120 113 304 f Gilbarco GmbH + Co. KG Error Codes - Sandpiper IIDocument5 pagesTraining Document: 120 113 304 f Gilbarco GmbH + Co. KG Error Codes - Sandpiper IICharlie ShowNo ratings yet
- Compare Energy Sources & Their Environmental EffectsDocument2 pagesCompare Energy Sources & Their Environmental Effectsamit shuklaNo ratings yet
- Parts Crane Hitachi FK600 - PRDocument2 pagesParts Crane Hitachi FK600 - PRDefly Gusti100% (1)
- Engineering Physics - G. AruldhasDocument100 pagesEngineering Physics - G. AruldhasJaya sankarNo ratings yet
- FisicaDocument352 pagesFisicaCg Tonio100% (1)
- Structure of SolidsDocument22 pagesStructure of SolidsNicole Anne Borromeo100% (1)
- AC192Document1 pageAC192soares_alexNo ratings yet
- Ship EducationDocument34 pagesShip EducationBabu MuruganNo ratings yet
- Liu JCP2019 Data Driven Intelligent Location Public Charging StationsDocument11 pagesLiu JCP2019 Data Driven Intelligent Location Public Charging StationsRodrigoNo ratings yet
- Laydown Light Towers: LED/Metal Halide/LED BalloonDocument2 pagesLaydown Light Towers: LED/Metal Halide/LED BalloonAugusto BellezaNo ratings yet
- Pest of PelDocument7 pagesPest of PelSaqib AkhtarNo ratings yet
- Water Wash Procedure For EconomizerDocument3 pagesWater Wash Procedure For EconomizerRajendra100% (1)
- Data Sheet 2BH1 840: Side Channel BlowerDocument2 pagesData Sheet 2BH1 840: Side Channel BlowerPablo Andres Espin MartinNo ratings yet
- Electrical Components 2Document9 pagesElectrical Components 2Mark Emerson BernabeNo ratings yet
- V-3111-002-A-711 - 2 Method Statement For Water Well WorkDocument14 pagesV-3111-002-A-711 - 2 Method Statement For Water Well WorkWidya PrasetyaNo ratings yet
- Produktkatalog 2019 WebDocument280 pagesProduktkatalog 2019 WebbagastcNo ratings yet
- Cit Asci tr334 PDFDocument18 pagesCit Asci tr334 PDFraguerreNo ratings yet
- 400TheoryTest AcrobatDocument4 pages400TheoryTest AcrobatRiahi RezegNo ratings yet
- 3 Goshu 3Document18 pages3 Goshu 3nega cheruNo ratings yet