You might also like
- Conjetura MaldacenaDocument76 pagesConjetura Maldacenarodolfo barbosaNo ratings yet
- Against Wavefunction RealismDocument13 pagesAgainst Wavefunction RealismOutis NemoNo ratings yet
- Reports Matiteaiaticas: ON PhysicsDocument26 pagesReports Matiteaiaticas: ON PhysicsMarie CherieNo ratings yet
- Hawking's Chronology Protection Conjecture: Singularity Structure of The Quantum Stress-Energy TensorDocument13 pagesHawking's Chronology Protection Conjecture: Singularity Structure of The Quantum Stress-Energy TensorMohamed MadaciNo ratings yet
- September: Physical Review 15 Integrals $Document7 pagesSeptember: Physical Review 15 Integrals $Célio LimaNo ratings yet
- AminexxDocument73 pagesAminexxAmal BãNo ratings yet
- The Particle Problem The General: JUI Ie35Document5 pagesThe Particle Problem The General: JUI Ie35vigneshwaranNo ratings yet
- Jaume Garriga Et Al - Probabilities in The Inflationary MultiverseDocument18 pagesJaume Garriga Et Al - Probabilities in The Inflationary MultiverseDex30KMNo ratings yet
- A Modified Gravity Theory: Null Aether: Metin G Urses and C Etin S Ent UrkDocument24 pagesA Modified Gravity Theory: Null Aether: Metin G Urses and C Etin S Ent UrkCroco AliNo ratings yet
- Banks QmblogDocument9 pagesBanks QmblogJohnCarter33No ratings yet
- GR LecturesDocument116 pagesGR LecturesPaul RyanNo ratings yet
- D. Dimitrijevic, G.S. Djordjevic and Lj. Nesic - Ultrametric Extradimensions and Tachyonic CosmologyDocument14 pagesD. Dimitrijevic, G.S. Djordjevic and Lj. Nesic - Ultrametric Extradimensions and Tachyonic CosmologyTuoma2No ratings yet
- Volovich Teoria de Numeros Como La Teoría DefinitivaDocument11 pagesVolovich Teoria de Numeros Como La Teoría DefinitivaDaniel AlejandroNo ratings yet
- Least SquaresDocument11 pagesLeast SquaresAlfredo Romero GNo ratings yet
- Brian Feldstein - Hawking Radiation in The Ghost Condensate Is Non-ThermalDocument26 pagesBrian Feldstein - Hawking Radiation in The Ghost Condensate Is Non-ThermalJummoeNo ratings yet
- Stationary and Related Stochastic Processes: Sample Function Properties and Their ApplicationsFrom EverandStationary and Related Stochastic Processes: Sample Function Properties and Their ApplicationsRating: 4 out of 5 stars4/5 (2)
- Gauss Theorm and The Method of Least SquaresDocument25 pagesGauss Theorm and The Method of Least SquaresManoj PaliwalNo ratings yet
- Axiomatics of Classical Statistical MechanicsFrom EverandAxiomatics of Classical Statistical MechanicsRating: 5 out of 5 stars5/5 (1)
- String Theory and AdS/CFT Correspondence Explained Without Perturbation TheoryDocument8 pagesString Theory and AdS/CFT Correspondence Explained Without Perturbation TheoryGerman ChiappeNo ratings yet
- The Warp Drive: Hyper-Fast Travel Within General Relativity: Classical and Quantum Gravity September 2000Document11 pagesThe Warp Drive: Hyper-Fast Travel Within General Relativity: Classical and Quantum Gravity September 2000Qhikey Qhiyesa MNo ratings yet
- Six Lectures On Geometric Quantization: Konstantin Wernli June 2, 2023Document77 pagesSix Lectures On Geometric Quantization: Konstantin Wernli June 2, 2023Daniele MarconiNo ratings yet
- Some of What Mathematicians Do-Krieger PDFDocument5 pagesSome of What Mathematicians Do-Krieger PDFGuido 125 LavespaNo ratings yet
- Annals v167 n2 p03Document67 pagesAnnals v167 n2 p03hjsndbe hxjdhNo ratings yet
- Annals v167 n2 p03Document67 pagesAnnals v167 n2 p03hjsndbe hxjdhNo ratings yet
- Chapter B Probability Via Measure Theory: 1 Measurable SpacesDocument54 pagesChapter B Probability Via Measure Theory: 1 Measurable SpacesThiago FerreiraNo ratings yet
- Finite Quantum Electrodynamics: The Causal Approach, Third EditionFrom EverandFinite Quantum Electrodynamics: The Causal Approach, Third EditionNo ratings yet
- MIT Course On AdS-CFT CorrspondenceDocument227 pagesMIT Course On AdS-CFT CorrspondenceMiguel Angel Martin Contreras100% (1)
- The VAK of Vacuum Uctuation, Spontaneous Self-Organization and Complexity Theory Interpretation of High Energy Particle Physics and The Mass SpectrumDocument20 pagesThe VAK of Vacuum Uctuation, Spontaneous Self-Organization and Complexity Theory Interpretation of High Energy Particle Physics and The Mass Spectrumpipul36No ratings yet
- A K Raychaudhuri Paper PDFDocument4 pagesA K Raychaudhuri Paper PDFsayanNo ratings yet
- The Banach-Tarski Paradox and the Axiom of ChoiceDocument10 pagesThe Banach-Tarski Paradox and the Axiom of ChoiceBrayan RomeroNo ratings yet
- The Fundamental Theorem of Algebra and Complexity Theory: by Steve SmaleDocument36 pagesThe Fundamental Theorem of Algebra and Complexity Theory: by Steve SmaleshekhawatmahaveerNo ratings yet
- Geometric Anatomy of Theoretical Physics LecturesDocument33 pagesGeometric Anatomy of Theoretical Physics Lecturesluos mejiaNo ratings yet
- H. G. White and E. W. Davis - The AlcubierreWarp Drive in Higher Dimensional SpacetimeDocument22 pagesH. G. White and E. W. Davis - The AlcubierreWarp Drive in Higher Dimensional SpacetimeHuntsmithNo ratings yet
- Wigner FunctionDocument4 pagesWigner FunctionBhawna BhatiaNo ratings yet
- Class Notes For Modern Physics Part 1Document115 pagesClass Notes For Modern Physics Part 1api-26870484100% (1)
- Infinite Loop Spaces (AM-90), Volume 90: Hermann Weyl Lectures, The Institute for Advanced Study. (AM-90)From EverandInfinite Loop Spaces (AM-90), Volume 90: Hermann Weyl Lectures, The Institute for Advanced Study. (AM-90)No ratings yet
- Resonance Magazine Oct 1996Document85 pagesResonance Magazine Oct 1996Kiran KuppaNo ratings yet
- G W Gibbons and C M Warnick - Universal Properties of The Near-Horizon Optical GeometryDocument32 pagesG W Gibbons and C M Warnick - Universal Properties of The Near-Horizon Optical GeometryOllo43No ratings yet
- Least SquaresDocument65 pagesLeast SquaresTAHIRNo ratings yet
- Comments On String Theory On AdsDocument47 pagesComments On String Theory On AdsmlmilleratmitNo ratings yet
- Non-Commutative Geometry IndomitableDocument12 pagesNon-Commutative Geometry IndomitableCarlos Alejandro Lara RodriguezNo ratings yet
- Exact Controllability for Non-Stationary Transport EquationDocument29 pagesExact Controllability for Non-Stationary Transport EquationJacques KazakuNo ratings yet
- String Theory A Mini-CourseDocument21 pagesString Theory A Mini-CourseDotia Modibo JamiuNo ratings yet
- 1511.05700Document11 pages1511.05700James RobinsonNo ratings yet
- Feller PDFDocument33 pagesFeller PDFCarmen GutibNo ratings yet
- Influence of Dissipation On Quantum Tunneling in Macroscopic SystemsDocument4 pagesInfluence of Dissipation On Quantum Tunneling in Macroscopic SystemsAakif AkhtarNo ratings yet
- An Accumulative Model For Quantum Theories: Christopher ThronDocument14 pagesAn Accumulative Model For Quantum Theories: Christopher Thronjzam1919No ratings yet
- V. I. Arnold Dynamics, Statistics and Projective Geometry of Galois FieldsDocument88 pagesV. I. Arnold Dynamics, Statistics and Projective Geometry of Galois FieldsSean Patrick WalshNo ratings yet
- Gauss - Riemann - Einstein: Michael P. WindhamDocument25 pagesGauss - Riemann - Einstein: Michael P. WindhamalexlhhcasNo ratings yet
- Division by ZeroDocument19 pagesDivision by ZeroJoao LiNo ratings yet
- (Kailath) - Some New Results in Least-SquaresDocument42 pages(Kailath) - Some New Results in Least-SquaresJose Perea ArangoNo ratings yet
- Quantum ProbabilityDocument11 pagesQuantum Probabilityalgebra100% (1)
- Physical Quantum AlgorithmsDocument7 pagesPhysical Quantum AlgorithmsSankha DeepNo ratings yet
- Koenker, R., & Bassett, G. (1978) - Regression QuantilesDocument24 pagesKoenker, R., & Bassett, G. (1978) - Regression QuantilesIlham AtmajaNo ratings yet
- The Origin of The Algebra of Quantum Operators in The Stochastic Formulation of Quantum Mechanics Mark DavidsonDocument9 pagesThe Origin of The Algebra of Quantum Operators in The Stochastic Formulation of Quantum Mechanics Mark DavidsonflyredeagleNo ratings yet
- Essay Dedicated To Abdus SalamDocument13 pagesEssay Dedicated To Abdus SalamMrBlueAlienNo ratings yet
- Looijenga Motivic MeasuresDocument26 pagesLooijenga Motivic MeasuresnguyenthehoangNo ratings yet
- Individual Mediclaim Terms and Conditions PDFDocument12 pagesIndividual Mediclaim Terms and Conditions PDFShrayan DuttaNo ratings yet
- Shopping Bus Schedule - 01.03 PDFDocument2 pagesShopping Bus Schedule - 01.03 PDFShrayan DuttaNo ratings yet
- Nuclear Power Corporation of India Limited: WWW - Npcilcareers.co - inDocument17 pagesNuclear Power Corporation of India Limited: WWW - Npcilcareers.co - inKumar SauravNo ratings yet
- Shopping Bus Schedule - 01.03 PDFDocument2 pagesShopping Bus Schedule - 01.03 PDFShrayan DuttaNo ratings yet
- Upsc Current Affairs in English PDF 03.04.2019.pdf 56Document5 pagesUpsc Current Affairs in English PDF 03.04.2019.pdf 56Shrayan DuttaNo ratings yet
- UPSCDocument44 pagesUPSCRashi Mathur100% (2)
- MtecheligibilityyhkkoDocument2 pagesMtecheligibilityyhkkoShrayan DuttaNo ratings yet
- RheumatologygjjkjgvDocument4 pagesRheumatologygjjkjgvShrayan DuttaNo ratings yet
- Flame Detector TechnologiesWhite PaperDocument6 pagesFlame Detector TechnologiesWhite PaperponsaravanNo ratings yet
- GetCaseStudyAttachment PDFDocument2 pagesGetCaseStudyAttachment PDFShrayan DuttaNo ratings yet
- CutOff CSM 2018 Engl PDFDocument1 pageCutOff CSM 2018 Engl PDFShrayan DuttaNo ratings yet
- Disruptive DiversityDocument1 pageDisruptive DiversityShrayan DuttaNo ratings yet
- Directions UG PDFDocument1 pageDirections UG PDFShrayan DuttaNo ratings yet
- List of Flights For Early Initialisation in DCS For IATCIDocument1 pageList of Flights For Early Initialisation in DCS For IATCIBhupinderNo ratings yet
- Form III PDFDocument1 pageForm III PDFShrayan DuttaNo ratings yet
- Holiday Calendar 2015Document1 pageHoliday Calendar 2015Shrayan DuttaNo ratings yet
- Faq 1237843Document3 pagesFaq 1237843Shrayan DuttaNo ratings yet
- 2 The Ebers-Moll BJT ModelDocument8 pages2 The Ebers-Moll BJT ModelnvjnjNo ratings yet
- SNAP CommandLine Tutorial 2Document10 pagesSNAP CommandLine Tutorial 2Shrayan DuttaNo ratings yet
- PWCDocument8 pagesPWCShrayan DuttaNo ratings yet
- Electronic Circuits Discrete and Integrated by Donald L Schilling and Charles Belove 1383.psDocument1 pageElectronic Circuits Discrete and Integrated by Donald L Schilling and Charles Belove 1383.psShrayan DuttaNo ratings yet
- Stack and SubroutineDocument25 pagesStack and Subroutinevinnyvineet100% (3)
- Process Instrumentation - IDocument1 pageProcess Instrumentation - IShrayan DuttaNo ratings yet
- PWCDocument8 pagesPWCShrayan DuttaNo ratings yet
- 1.data Structure 2.elec CKT Schilling-Belove 3.arduino 4.8051 Microprocessor 5.java 6.last Years Qs 7.elec PDF Books 8.stochastic SystemDocument1 page1.data Structure 2.elec CKT Schilling-Belove 3.arduino 4.8051 Microprocessor 5.java 6.last Years Qs 7.elec PDF Books 8.stochastic SystemShrayan DuttaNo ratings yet
- Kalman Filter Gains Independent of Sampling IntervalDocument13 pagesKalman Filter Gains Independent of Sampling IntervalShrayan DuttaNo ratings yet
- Microprocessorlabmanual EE0310Document87 pagesMicroprocessorlabmanual EE0310dhilipkumarNo ratings yet
- 12 06 26 12 12 10 1563 RavindrakumarDocument6 pages12 06 26 12 12 10 1563 RavindrakumarShrayan DuttaNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- CH Sravan KumarDocument5 pagesCH Sravan KumarJohnNo ratings yet
- Basicline BL 21t9stDocument28 pagesBasicline BL 21t9stgabriel6276No ratings yet
- CSE Catalog - IndiaDocument67 pagesCSE Catalog - IndiaDheeraj SivadasNo ratings yet
- PERFAPPRAISAL Research proposal on performance appraisal practices at National Bank of Pakistan and United Bank LimitedDocument4 pagesPERFAPPRAISAL Research proposal on performance appraisal practices at National Bank of Pakistan and United Bank LimitedNadia KhanNo ratings yet
- Numerical Ability - Data Interpretation 3: 25 QuestionsDocument6 pagesNumerical Ability - Data Interpretation 3: 25 QuestionsAvishek01No ratings yet
- Marco OH Lighting-Business Plan PDFDocument43 pagesMarco OH Lighting-Business Plan PDFsjcoolgeniusNo ratings yet
- Argus OXM CDocument2 pagesArgus OXM Candik100% (1)
- Mid Exam Odd Semester Academic Year 2021/2022 Study Program Management Faculty of Business Universitas Multimedia NusantaraDocument9 pagesMid Exam Odd Semester Academic Year 2021/2022 Study Program Management Faculty of Business Universitas Multimedia NusantaraaekimNo ratings yet
- Presentation On BAJAJDocument19 pagesPresentation On BAJAJVaibhav AgarwalNo ratings yet
- TCON300Document722 pagesTCON300DGGNo ratings yet
- Amptec Issue 7Document8 pagesAmptec Issue 7Linda Turner-BoothNo ratings yet
- List of Title-01Document30 pagesList of Title-01najwaNo ratings yet
- GestioIP 3.0 Installation GuideDocument17 pagesGestioIP 3.0 Installation GuidepiterasNo ratings yet
- BQ Mechanical (Sirim)Document7 pagesBQ Mechanical (Sirim)mohd farhan ariff zaitonNo ratings yet
- 3P61 Service Manual PDFDocument17 pages3P61 Service Manual PDFgulaab786No ratings yet
- Manual Instalaciones Electricas para Centros de ComputoDocument65 pagesManual Instalaciones Electricas para Centros de ComputoJorge Estrada0% (3)
- Atmel 42238 Uart Based Sam Ba Bootloader For Sam d20 AP Note At04189Document12 pagesAtmel 42238 Uart Based Sam Ba Bootloader For Sam d20 AP Note At04189manasaNo ratings yet
- Mathcad - Ampacity CalculationDocument76 pagesMathcad - Ampacity CalculationAlex Ribeiro100% (4)
- Duotone GuideDocument1 pageDuotone Guideapi-648378651No ratings yet
- Grade 6 Science PuzzleDocument4 pagesGrade 6 Science Puzzlemargie riveraNo ratings yet
- A134 PDFDocument4 pagesA134 PDFJarbas MoraesNo ratings yet
- SPP 40 Series Sponsored BE MTech Projects CollegewiseDocument145 pagesSPP 40 Series Sponsored BE MTech Projects CollegewiseVinay KumarNo ratings yet
- 0.9PF PW 380v 3phase HF UPS10-120kvaDocument8 pages0.9PF PW 380v 3phase HF UPS10-120kvaArmandinho CaveroNo ratings yet
- Managing ImapDocument408 pagesManaging ImapPriya RaoNo ratings yet
- Gysmi-Note UC3845BDGDocument1 pageGysmi-Note UC3845BDGfrance locatelNo ratings yet
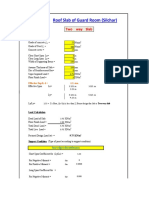
- Roof Slab of Guard RoomDocument3 pagesRoof Slab of Guard RoomAditya KumarNo ratings yet
- InductorsDocument13 pagesInductorsManish AnandNo ratings yet
- Cybersecurity-Student-Book Res Eng 1014Document38 pagesCybersecurity-Student-Book Res Eng 1014Nistor Andreea Maria100% (1)
- Budget EstimatesDocument251 pagesBudget EstimatesMUHAMMAD QASIM RAJPARNo ratings yet
- Reaction PaperDocument2 pagesReaction PaperRonald CostalesNo ratings yet