You might also like
- How To Be a Rocket Scientist: 10 Powerful Tips to Enter the Aerospace Field and Launch the Career of Your DreamsFrom EverandHow To Be a Rocket Scientist: 10 Powerful Tips to Enter the Aerospace Field and Launch the Career of Your DreamsRating: 5 out of 5 stars5/5 (1)
- Sustainable Use of Single-Cylinder Engine Over Multi-Cylinder Engine in Formula SAE/Formula Student VehicleDocument7 pagesSustainable Use of Single-Cylinder Engine Over Multi-Cylinder Engine in Formula SAE/Formula Student VehicleAnonymous kw8Yrp0R5rNo ratings yet
- Formula Student Electric VehicleDocument4 pagesFormula Student Electric VehicleAnay DalviNo ratings yet
- Vehicle Suspension System Varnhagen Creed KahawatteDocument29 pagesVehicle Suspension System Varnhagen Creed KahawatteRanjeetNo ratings yet
- Engineering Design via Surrogate Modelling: A Practical GuideFrom EverandEngineering Design via Surrogate Modelling: A Practical GuideRating: 5 out of 5 stars5/5 (1)
- Unmanned Aircraft SystemsFrom EverandUnmanned Aircraft SystemsElla AtkinsNo ratings yet
- Power Electronics Converters and their Control for Renewable Energy ApplicationsFrom EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNo ratings yet
- Brushless DC MotorDocument91 pagesBrushless DC MotorJaffar TayyarNo ratings yet
- Dynamic Modeling of Fixed-Wing UAVs (12.05.2006)Document12 pagesDynamic Modeling of Fixed-Wing UAVs (12.05.2006)Максим АнтіповNo ratings yet
- Simple Car DynamicsDocument16 pagesSimple Car DynamicsVincentius NikimNo ratings yet
- Modelling and Simulation of 6 DOF Motion Simulator For Underwater Research ApplicationsDocument1 pageModelling and Simulation of 6 DOF Motion Simulator For Underwater Research Applicationsvikram banthiaNo ratings yet
- Development and Use of A Regenerative Braking Model For A Parallel Hybrid Electric VehicleDocument14 pagesDevelopment and Use of A Regenerative Braking Model For A Parallel Hybrid Electric VehicleAnirudh NandakumarNo ratings yet
- AUV Controller Design and Analysis Using Full-State FeedbackDocument4 pagesAUV Controller Design and Analysis Using Full-State FeedbackanitapinkyNo ratings yet
- Autopilot Control SystemDocument13 pagesAutopilot Control SystemGamePlay DistinctNo ratings yet
- Mobile Robot ExperimentsDocument177 pagesMobile Robot ExperimentsAashish TuplondheNo ratings yet
- Control Techniques of Tilt Rotor Unmanned Aerial Vehicle Systems A ReviewDocument18 pagesControl Techniques of Tilt Rotor Unmanned Aerial Vehicle Systems A Reviewchen4567No ratings yet
- Electric MotorDocument31 pagesElectric Motorstallone21No ratings yet
- Parametric Modeling and Optimization of Propellers for AircraftDocument128 pagesParametric Modeling and Optimization of Propellers for Aircraftgfdsal878100% (1)
- Analysis of Automobile SuspensionDocument13 pagesAnalysis of Automobile SuspensionAfeez AzizNo ratings yet
- Design of A Real Time Smart Honking SystemDocument6 pagesDesign of A Real Time Smart Honking SystemArka MajumdarNo ratings yet
- OpenCV Object Detection TutorialDocument9 pagesOpenCV Object Detection TutorialAnantha Natarajan.vNo ratings yet
- BLDC Motor Control ANfpgaDocument8 pagesBLDC Motor Control ANfpgasraamu2k55068100% (1)
- SolarCell Sunpower C60 PDFDocument2 pagesSolarCell Sunpower C60 PDFinginheroNo ratings yet
- CG Measurement of MotorcycleDocument9 pagesCG Measurement of MotorcyclePrasanna MahendiranNo ratings yet
- Simulation of Control System For A Half Car Model Suspension System For Passenger Car Application by Design An LQR ControllerDocument8 pagesSimulation of Control System For A Half Car Model Suspension System For Passenger Car Application by Design An LQR ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Mathematical Simulation Model of A 1985-Era Tilt-Rotor Passenger AircraftDocument245 pagesA Mathematical Simulation Model of A 1985-Era Tilt-Rotor Passenger AircraftBrunno VasquesNo ratings yet
- Traction Motor DesignDocument11 pagesTraction Motor DesignS.m. FerdousNo ratings yet
- Aircraft DesignDocument25 pagesAircraft DesignVamsi ChowdaryNo ratings yet
- Modeling and Control of Quarter-Vehicle Suspension With A Semiactive Actuator, Stamat Stamatov - DissertationDocument335 pagesModeling and Control of Quarter-Vehicle Suspension With A Semiactive Actuator, Stamat Stamatov - DissertationsstamatovNo ratings yet
- Mathematical Modeling of The Electric Drive Train of The Sports CarDocument10 pagesMathematical Modeling of The Electric Drive Train of The Sports CarJuraj MadarásNo ratings yet
- A Review of Hybrid-Electric Energy Management and Its Inclusion in Vehicle SizingDocument8 pagesA Review of Hybrid-Electric Energy Management and Its Inclusion in Vehicle Sizingzc weiNo ratings yet
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocument7 pagesDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANo ratings yet
- KTH-RIT Biplane Wells Turbine CFD and Experimental AnalysisDocument93 pagesKTH-RIT Biplane Wells Turbine CFD and Experimental AnalysisLoc NguyenNo ratings yet
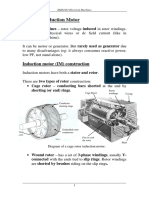
- Chapter 4 - Induction MotorsDocument36 pagesChapter 4 - Induction MotorsYousab Creator100% (1)
- Mechanical Systems and Signal Processing: El Houssin El Bouchikhi, Vincent Choqueuse, Mohamed BenbouzidDocument18 pagesMechanical Systems and Signal Processing: El Houssin El Bouchikhi, Vincent Choqueuse, Mohamed BenbouzidHumberto MerizaldeNo ratings yet
- Control of an electromagnetic suspension systemDocument94 pagesControl of an electromagnetic suspension systemMarcu SorinNo ratings yet
- FSAE Muffler DesignDocument1 pageFSAE Muffler DesignBambang MurtjahjantoNo ratings yet
- Variable Pitch Wells TurbineDocument10 pagesVariable Pitch Wells TurbineBotan AntonioNo ratings yet
- Quadcopter Design DocumentDocument23 pagesQuadcopter Design Documentapi-556772195No ratings yet
- Today: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric MachineDocument29 pagesToday: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric Machineciprian167No ratings yet
- Sigmadrive Range Manual Provisional ReleaseDocument47 pagesSigmadrive Range Manual Provisional ReleaseJanson Rojas HernándezNo ratings yet
- 1 Comparative Analysis For Various Artificial Intelligence Techniques Applied To Induction Motor DriveDocument12 pages1 Comparative Analysis For Various Artificial Intelligence Techniques Applied To Induction Motor DriveDrPrashant M. MenghalNo ratings yet
- Development of Landing GearDocument5 pagesDevelopment of Landing GearSatheesh KumarNo ratings yet
- Quadruped Walking Running SimulationDocument49 pagesQuadruped Walking Running SimulationbilynbkNo ratings yet
- Customer Preference and Satisfaction Towards Bajaj BikesDocument112 pagesCustomer Preference and Satisfaction Towards Bajaj BikesAshish LakraNo ratings yet
- Electromagnetic Breaking SystemDocument27 pagesElectromagnetic Breaking SystemRaj KamalNo ratings yet
- A Project Seminar On: Design and Fabrication of Hybrid Electric BikeDocument19 pagesA Project Seminar On: Design and Fabrication of Hybrid Electric BikeNaziya TazeenNo ratings yet
- Electric Aircraft Motor SelectionDocument74 pagesElectric Aircraft Motor Selectiondagger21No ratings yet
- Quadcopter Dynamics SimulationDocument24 pagesQuadcopter Dynamics SimulationwelltonarrudaNo ratings yet
- Magnetic Induction and ResonanceDocument16 pagesMagnetic Induction and ResonanceKim Won Kuk100% (1)
- A User Programmable Battery Charging Sys PDFDocument168 pagesA User Programmable Battery Charging Sys PDFAl AidenNo ratings yet
- GOSET 2.6 Manual PDFDocument126 pagesGOSET 2.6 Manual PDFHanen MejbriNo ratings yet
- Control Quadrotor HelicopterDocument184 pagesControl Quadrotor Helicopternhatthang299100% (1)
- Optimal LFC for Single Area Power Using LQG and CDMDocument17 pagesOptimal LFC for Single Area Power Using LQG and CDMاسأل شجر اللوزNo ratings yet
- Robust Localization of An Autonomous Underwater Vehicle: A Comparative StudyDocument7 pagesRobust Localization of An Autonomous Underwater Vehicle: A Comparative Studyspandan_roy_1989No ratings yet
- Construction and Analysis of PID, Fuzzy and Predictive Controllers in Flow SystemDocument7 pagesConstruction and Analysis of PID, Fuzzy and Predictive Controllers in Flow SystemLuigi FreireNo ratings yet
- Analysis of Linear Time Invariant Systems With Time DelayDocument12 pagesAnalysis of Linear Time Invariant Systems With Time DelayThái Minh NhậtNo ratings yet
- Predictive Controller For Hydraulic Cylinder Control of Ship Steering SystemDocument15 pagesPredictive Controller For Hydraulic Cylinder Control of Ship Steering SystemAhmad luthfi asrorNo ratings yet
- Motorcycle Design Guide March 2009Document32 pagesMotorcycle Design Guide March 2009Anonymous EfZxcqNJp2No ratings yet
- Transformation of Shadow Hand Prototype to Product for Intelligent ManipulationDocument2 pagesTransformation of Shadow Hand Prototype to Product for Intelligent ManipulationLe Anh TuanNo ratings yet
- Dinamica Del Veicolo IDocument87 pagesDinamica Del Veicolo ILe Anh TuanNo ratings yet
- Control of Autonomous Underwater Vehicles Using Serret-Frenet FrameDocument91 pagesControl of Autonomous Underwater Vehicles Using Serret-Frenet FrameLe Anh TuanNo ratings yet
- Doctoral Thesis-Five Finger Robotic HandDocument267 pagesDoctoral Thesis-Five Finger Robotic HandLe Anh Tuan50% (2)
- Print ANSYSDocument2 pagesPrint ANSYSLe Anh TuanNo ratings yet
- Russo V L.submarine Tankers.1960.TRANSDocument50 pagesRusso V L.submarine Tankers.1960.TRANSLe Anh Tuan100% (1)
- FulltextDocument129 pagesFulltextLe Anh TuanNo ratings yet
- Nbosi CT Manual - 2014Document7 pagesNbosi CT Manual - 2014Le Anh TuanNo ratings yet
- Tier 2 Nuclear SafetyDocument32 pagesTier 2 Nuclear SafetyLe Anh TuanNo ratings yet
- RCMeAe Abstract Vu Quoc HuyDocument1 pageRCMeAe Abstract Vu Quoc HuyLe Anh TuanNo ratings yet
- Fortran TutorialDocument28 pagesFortran TutorialIzemAmazighNo ratings yet
- ANSYS 17.0 Capabilities - BrochureDocument17 pagesANSYS 17.0 Capabilities - BrochureLe Anh TuanNo ratings yet
- Shadow Dexterous Hand Technical Specification E1 20130101Document14 pagesShadow Dexterous Hand Technical Specification E1 20130101Katherine GutierrezNo ratings yet
- Robotic HandDocument13 pagesRobotic HandLe Anh TuanNo ratings yet
- Accident of Nuclear Power PlantDocument9 pagesAccident of Nuclear Power PlantLe Anh TuanNo ratings yet
- Meshless Methods in LS-DYNA: An Overview of EFG and SPHDocument43 pagesMeshless Methods in LS-DYNA: An Overview of EFG and SPHLe Anh TuanNo ratings yet
- Theory Manual 1-6Document8 pagesTheory Manual 1-6Le Anh TuanNo ratings yet
- Calculation of Thermal Stress and Fatigue Life of 1000 MW Steam Turbine RotorDocument6 pagesCalculation of Thermal Stress and Fatigue Life of 1000 MW Steam Turbine RotorLe Anh TuanNo ratings yet
- LicenseDocument22 pagesLicenseLe Anh TuanNo ratings yet
- Weight Optimization of Turbine BladesDocument19 pagesWeight Optimization of Turbine BladesLe Anh TuanNo ratings yet
- 3.4. Stress StiffeningDocument12 pages3.4. Stress StiffeningLe Anh TuanNo ratings yet
- Handbook of Physics in Medicine and Biology PDFDocument521 pagesHandbook of Physics in Medicine and Biology PDFYudi TrigunaNo ratings yet
- MELCOR Computer Code Manuals Vol. 2: Reference ManualDocument897 pagesMELCOR Computer Code Manuals Vol. 2: Reference ManualJack CavaluzziNo ratings yet
- Wood 1902Document9 pagesWood 1902Lucho GonzalezNo ratings yet
- Chapter-4 - Moving Charges and MagnetismDocument8 pagesChapter-4 - Moving Charges and MagnetismAdarsh SilkotiNo ratings yet
- Magnetic InteractionsDocument13 pagesMagnetic InteractionsZsuzsa BorsayNo ratings yet
- Contoh Soal Pesamaan DiferensialDocument14 pagesContoh Soal Pesamaan DiferensialSanggul SimanullangNo ratings yet
- Size of NucleusDocument30 pagesSize of NucleusbelugaeaterNo ratings yet
- Principles of TurbomachineryDocument276 pagesPrinciples of TurbomachineryNavneet PAndeNo ratings yet
- EC2-Shear and TorsionDocument9 pagesEC2-Shear and TorsionDonald HamiltonNo ratings yet
- Electrodynamometer Type InstrumentDocument9 pagesElectrodynamometer Type Instrumentanon_463330020No ratings yet
- Radiation Protection and Dosimetry Assessment 2Document2 pagesRadiation Protection and Dosimetry Assessment 2George ChahniNo ratings yet
- A Computational Model of A Power Plant Steam Condenser: R. P. RoyDocument11 pagesA Computational Model of A Power Plant Steam Condenser: R. P. RoyAhmed HelmyNo ratings yet
- BS 00848-9-2007 (Iso 13348-2007) PDFDocument62 pagesBS 00848-9-2007 (Iso 13348-2007) PDFKevin TangNo ratings yet
- New Blade Profile For Darrieus Wind TurbinesDocument5 pagesNew Blade Profile For Darrieus Wind Turbinesأحمد إبراهيم شواربNo ratings yet
- Acoustic Emission TestingDocument24 pagesAcoustic Emission TestingWoodrow FoxNo ratings yet
- Chapter 4 PDFDocument47 pagesChapter 4 PDFAdolfo ElizondoNo ratings yet
- Mechanical Design of Overhead LinesDocument9 pagesMechanical Design of Overhead Linesmuhammad_sarwar_27No ratings yet
- AP Workbook 4-G-2Document3 pagesAP Workbook 4-G-2Steve PeraltaNo ratings yet
- Helical spring stress and elongation calculationsDocument4 pagesHelical spring stress and elongation calculationsMavrix AgustinNo ratings yet
- AP 2012 Physics B Free Response QuestionsDocument12 pagesAP 2012 Physics B Free Response QuestionsAlan G.No ratings yet
- TikZ-Feynman: Draw Feynman Diagrams with TikZDocument33 pagesTikZ-Feynman: Draw Feynman Diagrams with TikZwintersoulsNo ratings yet
- Doppler EffectDocument38 pagesDoppler EffectIhtisham Ahmad ButtNo ratings yet
- Engine MountDocument8 pagesEngine MountAkash WaitageNo ratings yet
- Library GenesisDocument8 pagesLibrary Genesisribporto1100% (1)
- Unit 10 FieldsDocument1 pageUnit 10 FieldsGajendraNo ratings yet
- IB Chem 8 Assess Aws8Document3 pagesIB Chem 8 Assess Aws8mgupta72No ratings yet
- Pile Footing Detailed Design CalculationDocument3 pagesPile Footing Detailed Design CalculationChris LeeNo ratings yet
- Tutorial - Sheet 3Document3 pagesTutorial - Sheet 3Abraham KabweNo ratings yet
- Tunnel NoiseDocument11 pagesTunnel Noisesylvestrew100% (1)
- General Chemistry 2 Kinetic Molecular Model of Solids and LiquidsDocument3 pagesGeneral Chemistry 2 Kinetic Molecular Model of Solids and LiquidsJohnmark RaquiñoNo ratings yet