You might also like
- Energy Systems II Lab (ME401A) : Experiment 1Document11 pagesEnergy Systems II Lab (ME401A) : Experiment 1Abhishek BansalNo ratings yet
- Energy Systems II Lab (ME401A) : Experiment 1Document11 pagesEnergy Systems II Lab (ME401A) : Experiment 1Abhishek BansalNo ratings yet
- Rajshahi University of Engineering and Technology, RajshahiDocument9 pagesRajshahi University of Engineering and Technology, RajshahiShakil Ahmed100% (1)
- Experiment 2: Aim: To Observe The Performance Characteristics of DC Shunt Motor. ApparatusDocument3 pagesExperiment 2: Aim: To Observe The Performance Characteristics of DC Shunt Motor. ApparatusVIBHU CHANDRANSH BHANOTNo ratings yet
- Mechanical PrinciplesDocument46 pagesMechanical PrinciplesHarshini Premachandra0% (1)
- Engine Performace Lab Report - Naji Ullah-A1908419Document20 pagesEngine Performace Lab Report - Naji Ullah-A1908419Naji UllahNo ratings yet
- Pump Performance AnalysisDocument15 pagesPump Performance AnalysisMohamad AzmeerNo ratings yet
- Exercises On ELECTRICAL MACHINESDocument29 pagesExercises On ELECTRICAL MACHINESDavide100% (1)
- Lab Report Experiment 1Document12 pagesLab Report Experiment 1Mohd Sayfull33% (3)
- Dato T1(s) T2 (S) V (L) HL1 (MM) HL2 (MM) HLDocument17 pagesDato T1(s) T2 (S) V (L) HL1 (MM) HL2 (MM) HLyariza GutierrezNo ratings yet
- Peng-Robinson EOS For Z-FactorDocument29 pagesPeng-Robinson EOS For Z-FactorNando_MB94No ratings yet
- Open Ended Lab: ObjectivesDocument4 pagesOpen Ended Lab: Objectivesaff123051No ratings yet
- Aa + BB +CC+DD RR A+ (B/a) B + (C/a) C + (D/a) D (R/a) R R - KC C C C N N (1-X) N N - (B/a) (N - N) N N - (C/a) (N - N) N N - (D/a) (N - N) C N /VDocument7 pagesAa + BB +CC+DD RR A+ (B/a) B + (C/a) C + (D/a) D (R/a) R R - KC C C C N N (1-X) N N - (B/a) (N - N) N N - (C/a) (N - N) N N - (D/a) (N - N) C N /VChemical EngineeringNo ratings yet
- 5Document6 pages5Harmanpreet SinghNo ratings yet
- Dynamics Lab Balancing of Reciprocating Masses: Vaishnavi K ME18BTECH11017Document15 pagesDynamics Lab Balancing of Reciprocating Masses: Vaishnavi K ME18BTECH11017VAISHNAVI KNo ratings yet
- Small Wind Tunnel Lift and Drag ExperimentDocument8 pagesSmall Wind Tunnel Lift and Drag ExperimentKumar ArpitNo ratings yet
- Mphahlele TJ 219080587 Lab 1Document11 pagesMphahlele TJ 219080587 Lab 1Sive MatebeseNo ratings yet
- RUMUSDocument6 pagesRUMUSHabib Faisal YahyaNo ratings yet
- Asset-V1 CornellX+ENGR2000X+2T2016+Type@Asset+Block@F-1 Engine Model Calculations Non-Proprietyary Non-ITAR Rev2Document26 pagesAsset-V1 CornellX+ENGR2000X+2T2016+Type@Asset+Block@F-1 Engine Model Calculations Non-Proprietyary Non-ITAR Rev2salehmashrur 98No ratings yet
- KIMIA FISIKA HIDROCARBONDocument9 pagesKIMIA FISIKA HIDROCARBONIlhamRifaldiNo ratings yet
- Problema 1 OpeDocument9 pagesProblema 1 OpeWilmer CondoriNo ratings yet
- Lab ManualDocument9 pagesLab ManualMohit SinhaNo ratings yet
- Name3155 Lab#4 g7 UpdatedDocument19 pagesName3155 Lab#4 g7 UpdatedJose FranciscoNo ratings yet
- Tugas 5 MetNum 1 (Pengganti Kuis 2) RevisiDocument2 pagesTugas 5 MetNum 1 (Pengganti Kuis 2) RevisiFatih ArifNo ratings yet
- 120 °F Gas Mixture Phase Equilibrium CalculationDocument38 pages120 °F Gas Mixture Phase Equilibrium CalculationNELSONBOYSNo ratings yet
- Laboratory Consolidation TestDocument10 pagesLaboratory Consolidation Testنور عليNo ratings yet
- Teague's ShaftDocument145 pagesTeague's ShaftBUDAPESNo ratings yet
- Wall Bearing SystemDocument45 pagesWall Bearing SystemRabi DhakalNo ratings yet
- Structural Dynamics Assignment-1: K Abdul Ajeej 17MST0002Document5 pagesStructural Dynamics Assignment-1: K Abdul Ajeej 17MST0002abdulajeej salluNo ratings yet
- Set-I AnswerDocument9 pagesSet-I Answershivansh gandhiNo ratings yet
- Load Vs Penetration: CBR VALUE at 2.5 MMDocument6 pagesLoad Vs Penetration: CBR VALUE at 2.5 MMBhargavi ChowdaryNo ratings yet
- Praktikum Marine Diesel Kelompok 2Document25 pagesPraktikum Marine Diesel Kelompok 2Bayu Cmag Miliek YannaNo ratings yet
- Document 1Document27 pagesDocument 1spalaniandavar07No ratings yet
- Graficos - CmaDocument2 pagesGraficos - CmaAnnie MachacaNo ratings yet
- EXP2.1Technical Report Form of Internal Combustion Engine LabDocument8 pagesEXP2.1Technical Report Form of Internal Combustion Engine Labمصطفى سعيد سعد برغوث 201810526No ratings yet
- Report ExperDocument5 pagesReport ExperAliNo ratings yet
- Engneering Mechanics Lab ManualDocument62 pagesEngneering Mechanics Lab ManualAwais AhmadNo ratings yet
- Rumus Wi (Indicated Horse Power)Document9 pagesRumus Wi (Indicated Horse Power)Anonymous dAxAszGNo ratings yet
- Peng-Robinson EOS For Z-FactorDocument29 pagesPeng-Robinson EOS For Z-FactorCHANADASNo ratings yet
- Internal Combustion Engines Lab: ObjectivesDocument9 pagesInternal Combustion Engines Lab: ObjectivesM Junaid tabassumNo ratings yet
- S14 Quantitative Research (Rstudio Video)Document14 pagesS14 Quantitative Research (Rstudio Video)Andrés Espinoza100% (1)
- Lab 127Document15 pagesLab 127AeonianNo ratings yet
- Lab 4 - Agitation and Mixing of Liquids (Group W2)Document16 pagesLab 4 - Agitation and Mixing of Liquids (Group W2)Cambo SUTNo ratings yet
- Mech 343 Lab 2 ReportDocument16 pagesMech 343 Lab 2 ReportYousef MeguidNo ratings yet
- HW1 ReportDocument3 pagesHW1 ReportAbdul Ahad100% (1)
- Curva de Calibracion: Absorbancia ConcentracioDocument6 pagesCurva de Calibracion: Absorbancia ConcentracioGerardo F. MartinezNo ratings yet
- Tower Load CalculationsDocument6 pagesTower Load CalculationsALEX BNo ratings yet
- MECH 213 Centrifugal Force Lab ResultsDocument11 pagesMECH 213 Centrifugal Force Lab ResultsFarhan EdwinNo ratings yet
- Brinell Hardness Test LabDocument9 pagesBrinell Hardness Test LabAlec ThaemlitzNo ratings yet
- Case 7Document10 pagesCase 7hassan3012No ratings yet
- OD32mm DC Gear Motor-1Document8 pagesOD32mm DC Gear Motor-1Humberto GalvezNo ratings yet
- EclipssssssDocument6 pagesEclipssssssRestyanti YunseNo ratings yet
- Nozzle Jet Reaction Sample ReportDocument17 pagesNozzle Jet Reaction Sample ReportSaurabh YadavNo ratings yet
- METODE YAMAGATA SHIP RESISTANCE CALCULATIONDocument104 pagesMETODE YAMAGATA SHIP RESISTANCE CALCULATIONZul SyahrilNo ratings yet
- Ac Servo Motor LabDocument23 pagesAc Servo Motor LabHardik SharmaNo ratings yet
- Weibull FinalDocument10 pagesWeibull FinalJorge Paul Ortiz NuñezNo ratings yet
- Design and Calculation ShaftDocument115 pagesDesign and Calculation ShaftDavid Lambert100% (3)
- Concordia University Irvine: Top 1000 VerbsDocument22 pagesConcordia University Irvine: Top 1000 VerbsMelody KimNo ratings yet
- ME3870 - Lab1 - Hands On With LabVIEW11Document7 pagesME3870 - Lab1 - Hands On With LabVIEW11Melody KimNo ratings yet
- Mechancial Engineering - Introduction To Design (ME 2900) SyllabusDocument6 pagesMechancial Engineering - Introduction To Design (ME 2900) SyllabusMelody KimNo ratings yet
- Determining A Rate Law and Rate ConstantDocument12 pagesDetermining A Rate Law and Rate ConstantMelody Kim100% (1)
- Physics 14 HWDocument2 pagesPhysics 14 HWMelody KimNo ratings yet
- Physics E&M - EquationsDocument4 pagesPhysics E&M - EquationsMelody KimNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- The Four Parts of The Heart-Mind, Will, Emotion, and ConscienceDocument3 pagesThe Four Parts of The Heart-Mind, Will, Emotion, and ConscienceMelody KimNo ratings yet
- Se3-Manual - (1) - 1-113-41-80Document40 pagesSe3-Manual - (1) - 1-113-41-80Julio MarquezNo ratings yet
- Sodium Silicates Versatile AdhesivesDocument4 pagesSodium Silicates Versatile AdhesivesDan DanubiusNo ratings yet
- Pages From Oil-Thermal Insulation Handbook For The Oil, Gas, and Petrochemical Industries - (2014)Document1 pagePages From Oil-Thermal Insulation Handbook For The Oil, Gas, and Petrochemical Industries - (2014)rats182No ratings yet
- Woodward Installation & OperationDocument34 pagesWoodward Installation & OperationRiRie RamLee100% (2)
- BFF Physics and Chemistry PDFDocument13 pagesBFF Physics and Chemistry PDFtekebaNo ratings yet
- Damping DynaDocument15 pagesDamping DynasbhariNo ratings yet
- Actuated ValvesDocument41 pagesActuated ValvesFluidra GroupNo ratings yet
- Design of Machine ElementsDocument4 pagesDesign of Machine ElementsniteshNo ratings yet
- Final Research PavilionDocument27 pagesFinal Research PavilionMichelle VillarandaNo ratings yet
- Quick Exam Notes NA Science Chemistry PDFDocument88 pagesQuick Exam Notes NA Science Chemistry PDFMaverickNo ratings yet
- PHY3512 Tut7 SolutionsDocument4 pagesPHY3512 Tut7 SolutionsFeel-more HekandjoNo ratings yet
- Moisture MethodsDocument35 pagesMoisture Methodsswatkate3792No ratings yet
- Course of Multiphase FlowDocument185 pagesCourse of Multiphase FlowArindam DeyNo ratings yet
- KuliteDocument1 pageKuliteVinícius Martins FreireNo ratings yet
- Managerial Accounting: Submitted To Prof. Barnali ChakladerDocument13 pagesManagerial Accounting: Submitted To Prof. Barnali ChakladerMoody MusicNo ratings yet
- P6 PAL Science L13 Forms and Uses of EnergyDocument24 pagesP6 PAL Science L13 Forms and Uses of EnergyXuaN XuanNo ratings yet
- 921e Cargador Frontal CaterpillarDocument8 pages921e Cargador Frontal CaterpillarElvis Eberth Huanca MachacaNo ratings yet
- MOTIVATION TEMPLATE: RBO Additional Electrical SparesDocument2 pagesMOTIVATION TEMPLATE: RBO Additional Electrical Sparespepenapao1217No ratings yet
- Ex9BH DisjunctoriDocument11 pagesEx9BH DisjunctoriTiberiuBabetNo ratings yet
- Flat Roof - WikipediaDocument6 pagesFlat Roof - WikipediaIeeeChannaNo ratings yet
- Transport Phenomena in Discontinuous Metal FilmDocument3 pagesTransport Phenomena in Discontinuous Metal FilmPragyaNo ratings yet
- 2021 Elliott Classroom TrainingDocument1 page2021 Elliott Classroom Trainingadam yassineNo ratings yet
- Paneles Canadian Solar-Datasheet-HiKu CS3N-MS en 410WpDocument2 pagesPaneles Canadian Solar-Datasheet-HiKu CS3N-MS en 410WpManuel Fombuena SánchezNo ratings yet
- Group3 A6-1Document111 pagesGroup3 A6-1JulietteNo ratings yet
- Alfonso V. Ramallo PDFDocument64 pagesAlfonso V. Ramallo PDFanirbanNo ratings yet
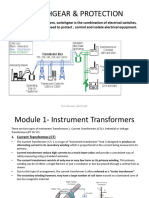
- Switchgear & Protection: - in An Electric Power System, Switchgear Is The Combination of Electrical SwitchesDocument5 pagesSwitchgear & Protection: - in An Electric Power System, Switchgear Is The Combination of Electrical SwitchesSalim ShaikhNo ratings yet
- Essential equipment maintenance checklistDocument3 pagesEssential equipment maintenance checklistYonas AyeleNo ratings yet
- The Electromagnetic Field Theory TextbookDocument221 pagesThe Electromagnetic Field Theory Textbookapi-3728411100% (1)
- EAF Refractory Performance at Pacific SteelDocument11 pagesEAF Refractory Performance at Pacific SteelSaragadam DilsriNo ratings yet
- Gas Insulated TransformerDocument12 pagesGas Insulated Transformermithun1105No ratings yet