You might also like
- Lista de Exercícios 1 - RA 1 - TERMODINÂMICADocument4 pagesLista de Exercícios 1 - RA 1 - TERMODINÂMICAl kuromiiya100% (1)
- Prop LogaritmosDocument5 pagesProp LogaritmosIgor CarvalhoNo ratings yet
- Matemática 2o Ano Ensino Médio Logaritmos TrigonometriaDocument3 pagesMatemática 2o Ano Ensino Médio Logaritmos Trigonometriamendes_marcNo ratings yet
- BDQ AV2 Linguagem de ProgramaçãoDocument75 pagesBDQ AV2 Linguagem de ProgramaçãoPaulo Vyctor100% (1)
- Apostila BeamerDocument19 pagesApostila BeamerErberson Rodrigues PinheiroNo ratings yet
- Matriz EsDocument3 pagesMatriz Esmika 2015No ratings yet
- Mapa - Eletrônica Digital - 51-2023Document4 pagesMapa - Eletrônica Digital - 51-2023Cavalini Assessoria Acadêmica0% (1)
- Roteiro de Prática Experimental CinemáticaDocument3 pagesRoteiro de Prática Experimental CinemáticaMurilo LacerdaNo ratings yet
- Trabalho Gilmar 2010 Mat FinanceiraDocument19 pagesTrabalho Gilmar 2010 Mat FinanceiraDaniele FerreiraNo ratings yet
- Geometria básica: conceitos e exercíciosDocument61 pagesGeometria básica: conceitos e exercíciosEdneyNo ratings yet
- Gabarito Questões de Física 2º Ano FísicaDocument16 pagesGabarito Questões de Física 2º Ano FísicaRogerio SenaNo ratings yet
- LogaritmosDocument15 pagesLogaritmosRenata RamalhoNo ratings yet
- Distância Entre Ponto e RetaDocument8 pagesDistância Entre Ponto e RetaMatheus MeiattoNo ratings yet
- Exercícios - LogaritmosDocument1 pageExercícios - LogaritmosJoão Victor MirandaNo ratings yet
- Capitulo 02Document30 pagesCapitulo 02betrovincNo ratings yet
- Aula 06 - Mínimo Múltiplo ComumDocument7 pagesAula 06 - Mínimo Múltiplo Comumdimenorrl12No ratings yet
- Interpolação polinomial exercíciosDocument3 pagesInterpolação polinomial exercíciosAguinaldo Borba Pereira100% (1)
- Atividades complementares - expressões algébricasDocument2 pagesAtividades complementares - expressões algébricasAlessandraBaldanzaNo ratings yet
- FAMILIA DO CARBONO - CópiaDocument53 pagesFAMILIA DO CARBONO - CópiaWalleria SantanaNo ratings yet
- Lista de Matrizes e DeterminantesDocument2 pagesLista de Matrizes e DeterminantesJohnny Carlos SilvaNo ratings yet
- Polígonos Regulares e Área Das Figuras PlanasDocument22 pagesPolígonos Regulares e Área Das Figuras PlanasGeovana LuzNo ratings yet
- Cinematica Graficos de MUVDocument21 pagesCinematica Graficos de MUVAlan RamosNo ratings yet
- Cálculo Numérico para Oficiais Da Marinha MercanteDocument18 pagesCálculo Numérico para Oficiais Da Marinha MercanteFernando Willy Medeiros100% (1)
- Lista de Exercícios 5 - Taxas 2Document2 pagesLista de Exercícios 5 - Taxas 2LeôncioNo ratings yet
- Aula de Matriz, Determinante e SistemasDocument15 pagesAula de Matriz, Determinante e SistemasReginaldo CoelhoNo ratings yet
- ExerciciosDocument6 pagesExerciciosTales Vitor100% (1)
- Razões trigonométricas e medidas de altura e distânciaDocument4 pagesRazões trigonométricas e medidas de altura e distânciaDirceu MirandaNo ratings yet
- Lista Exercícios EstequiometriaDocument2 pagesLista Exercícios EstequiometriaRenan De Jesus Pontes Camargo100% (1)
- Primeira Lei da Termodinâmica - Exercícios ResolvidosDocument3 pagesPrimeira Lei da Termodinâmica - Exercícios ResolvidosbrunoafaNo ratings yet
- Resolução Da Lista 1 - QuadriláterosDocument11 pagesResolução Da Lista 1 - Quadriláterosdelima_carvalho252No ratings yet
- Método dos Deslocamentos para Quadros HiperestáticosDocument12 pagesMétodo dos Deslocamentos para Quadros HiperestáticosJoadi LacerdaNo ratings yet
- Exemplo de Módulo Didático - Desenho Geométrico Com Régua e CompassoDocument31 pagesExemplo de Módulo Didático - Desenho Geométrico Com Régua e Compassotoledoufsj100% (1)
- Prova Do Modulo V 2019 N2Document5 pagesProva Do Modulo V 2019 N2Israel Farraz de SouzaNo ratings yet
- Revisando Polinômios, Produtos Notáveis e Frações AlgébricasDocument17 pagesRevisando Polinômios, Produtos Notáveis e Frações AlgébricasDiogo Mendonça100% (1)
- Roteiro de Aula Prática - Sistemas OperacionaisDocument9 pagesRoteiro de Aula Prática - Sistemas OperacionaisLeandro WilliamsNo ratings yet
- Função QuadráticaDocument8 pagesFunção QuadráticaAlessandra Duarte PeixotoNo ratings yet
- Trigonometria relógio ângulo 40Document2 pagesTrigonometria relógio ângulo 40Pedro Sérgio BuosiNo ratings yet
- GeoGebra Aulas Ciclo Básico EngenhariaDocument6 pagesGeoGebra Aulas Ciclo Básico EngenhariaJean Neves dos Santos SerraNo ratings yet
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoFrom EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo ratings yet
- 1 ANO - Trigonometria No Triângulo Retângulo - 2008Document54 pages1 ANO - Trigonometria No Triângulo Retângulo - 2008232305No ratings yet
- Funções Afins ExercíciosDocument14 pagesFunções Afins ExercíciosValjeannussNo ratings yet
- Primeira Lista de Exercícios 13.1Document4 pagesPrimeira Lista de Exercícios 13.1evelinrmNo ratings yet
- Lista 3 Ciclo Trigonometrico e Função TrigonométricaDocument2 pagesLista 3 Ciclo Trigonometrico e Função TrigonométricaprofSalsichaNo ratings yet
- Equação Do 2 GrauDocument1 pageEquação Do 2 GrauDulda100% (1)
- Guia de introdução para configuração e uso de conversor de TV digitalDocument20 pagesGuia de introdução para configuração e uso de conversor de TV digitalJosé MarinhoNo ratings yet
- Geometria Plana Teorema Das Bissetrizes Internas e Externas 2016Document5 pagesGeometria Plana Teorema Das Bissetrizes Internas e Externas 2016iancamposlinsNo ratings yet
- Diagrama de Bode: análise da resposta em frequência de sistemas linearesDocument11 pagesDiagrama de Bode: análise da resposta em frequência de sistemas linearesAlan de MeloNo ratings yet
- Sistemas de Numeração PosicionaisDocument6 pagesSistemas de Numeração PosicionaisNascimento JgaNo ratings yet
- Lógica Booleana e Circuitos LógicosDocument3 pagesLógica Booleana e Circuitos Lógicosrogersantosferreira100% (1)
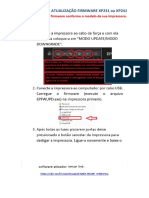
- Tutorial Ativação Chave XP 241 231Document5 pagesTutorial Ativação Chave XP 241 231André Fagundes PereiraNo ratings yet
- Lista de DilataçãoDocument19 pagesLista de DilataçãoWeslley Alves0% (1)
- Lista Resolvida de Funcao ExponencialDocument3 pagesLista Resolvida de Funcao ExponencialsandraNo ratings yet
- Operações com radicaisDocument4 pagesOperações com radicaisVanderson Sabino0% (1)
- Laboratorio de Transferencia de Calor Relatorio 01 Determinacao Da Condutividade Termica Do Cobre K PDFDocument10 pagesLaboratorio de Transferencia de Calor Relatorio 01 Determinacao Da Condutividade Termica Do Cobre K PDFJéssica PriscilaNo ratings yet
- Prova Juliana 1Document1 pageProva Juliana 1Eduardo Guedes CostaNo ratings yet
- Manual SinergiaDocument36 pagesManual SinergiaIsabel CarolinaNo ratings yet
- Guia de reparo de TV plasma PANASONIC com códigos de erro de LED powerDocument53 pagesGuia de reparo de TV plasma PANASONIC com códigos de erro de LED poweralphamusic77% (26)
- Instale e opere sua SPA Weekend com segurançaDocument31 pagesInstale e opere sua SPA Weekend com segurançaLucas AdrielNo ratings yet
- 18 - 1 - Resumo Lugar Das RaizesDocument1 page18 - 1 - Resumo Lugar Das RaizesJDTNo ratings yet
- Painéis Elétricos e CCMsDocument66 pagesPainéis Elétricos e CCMsOsvaldo CruzNo ratings yet
- Apostila de Comandos Elétrico (SENAI) PDFDocument282 pagesApostila de Comandos Elétrico (SENAI) PDFJDT100% (2)
- Apostila 1 - MS Project 2016 (Básico)Document15 pagesApostila 1 - MS Project 2016 (Básico)JDTNo ratings yet
- Apostila Acionamentos Eletricos 2008 NeemiasDocument56 pagesApostila Acionamentos Eletricos 2008 Neemiasrodrigo_0909No ratings yet
- 14 00 Desafios Da Pesquisa e Desenvolvimento para Smart Grid-Aneel-Maximo Luiz PompermayerDocument13 pages14 00 Desafios Da Pesquisa e Desenvolvimento para Smart Grid-Aneel-Maximo Luiz PompermayerJDTNo ratings yet
- 15 20 Sistema de Monitoramento Aplicado Ao Conceito Smartgrid-Alexandre Bagarolli PDFDocument25 pages15 20 Sistema de Monitoramento Aplicado Ao Conceito Smartgrid-Alexandre Bagarolli PDFJDTNo ratings yet
- Apostila SpdaDocument10 pagesApostila SpdaDaiana Negherbon Sanseverino100% (1)
- 15.00 - Sistema Computacional - José Ricardo Portillo Navas - KNBSDocument34 pages15.00 - Sistema Computacional - José Ricardo Portillo Navas - KNBSJDTNo ratings yet
- Apostila SpdaDocument10 pagesApostila SpdaDaiana Negherbon Sanseverino100% (1)
- 08-30 Iec-Amaury Santos PDFDocument12 pages08-30 Iec-Amaury Santos PDFJDTNo ratings yet
- As 10 principais partidas de motoresDocument39 pagesAs 10 principais partidas de motoresJohnathan BarbosaNo ratings yet
- 08-30 Iec-Amaury Santos PDFDocument12 pages08-30 Iec-Amaury Santos PDFJDTNo ratings yet
- 15 20 Sistema de Monitoramento Aplicado Ao Conceito Smartgrid-Alexandre Bagarolli PDFDocument25 pages15 20 Sistema de Monitoramento Aplicado Ao Conceito Smartgrid-Alexandre Bagarolli PDFJDTNo ratings yet
- 10 50 Infraestrutura Necessaria para Smart Grid-Trinity-Paulo HumbertoDocument20 pages10 50 Infraestrutura Necessaria para Smart Grid-Trinity-Paulo HumbertoJDTNo ratings yet
- 14 00 Desafios Da Pesquisa e Desenvolvimento para Smart Grid-Ieeusp-Jose AquilesDocument35 pages14 00 Desafios Da Pesquisa e Desenvolvimento para Smart Grid-Ieeusp-Jose AquilesJDTNo ratings yet
- Apostila SpdaDocument10 pagesApostila SpdaDaiana Negherbon Sanseverino100% (1)
- Curso de Comandos Elétricos e SilbologiaDocument47 pagesCurso de Comandos Elétricos e SilbologiaDarlan78% (9)
- PDS Simples AplicaçãoDocument9 pagesPDS Simples AplicaçãoJDTNo ratings yet
- Smartgrid - Um Caminho Desenhado Na Maturidade Individual e Específica de EmpresaDocument19 pagesSmartgrid - Um Caminho Desenhado Na Maturidade Individual e Específica de EmpresaJDTNo ratings yet
- Apostila Msp430 - C - Parte IDocument55 pagesApostila Msp430 - C - Parte ICecilio MartinsNo ratings yet
- Apostila SpdaDocument10 pagesApostila SpdaDaiana Negherbon Sanseverino100% (1)
- Apostila TechTrain MSP430 PARTE IDocument56 pagesApostila TechTrain MSP430 PARTE IJDT100% (1)
- Padrão de Comunicação Zigbee.Document11 pagesPadrão de Comunicação Zigbee.JDTNo ratings yet
- Revista Potência Ed 148 PDFDocument84 pagesRevista Potência Ed 148 PDFJDTNo ratings yet
- AED - N2 Padrão de Comunicação ZigbeeDocument11 pagesAED - N2 Padrão de Comunicação ZigbeeJDTNo ratings yet
- Intro Ao ArduinoDocument31 pagesIntro Ao ArduinoJDTNo ratings yet
- Apostila de Inversores de Frequência 1Document3 pagesApostila de Inversores de Frequência 1Lupércio GuedesNo ratings yet
- Introdução ao Arduino DuemilanoveDocument89 pagesIntrodução ao Arduino DuemilanoveJDTNo ratings yet
- Manuscrito CinintelDocument10 pagesManuscrito CinintelJosé Esivaldo SantosNo ratings yet
- Tutorial Acompanhamento Pela AS Dez2022Document56 pagesTutorial Acompanhamento Pela AS Dez2022Hugo PortelaNo ratings yet
- Manual Do Usuário - Bomba de Infusão LifemedDocument75 pagesManual Do Usuário - Bomba de Infusão LifemedFlavia Diniz0% (3)
- SICON - Acompanhamento FamiliarDocument4 pagesSICON - Acompanhamento FamiliardilceusilvaNo ratings yet
- Atualização SpotWare 9.4Document53 pagesAtualização SpotWare 9.4Luís SousaNo ratings yet
- Atividade 3 - 29-01-21Document4 pagesAtividade 3 - 29-01-21Samuel Castro RibeiroNo ratings yet
- Processo de Depuração e Características - MATLAB e SimulinkDocument21 pagesProcesso de Depuração e Características - MATLAB e Simulinkmarcelo_fis_matNo ratings yet
- Por Baixo Da TerraDocument4 pagesPor Baixo Da TerraDANIEL ALMEIDANo ratings yet
- 9 Livro de Adm Da Prod Cap 9 ManutençãoDocument29 pages9 Livro de Adm Da Prod Cap 9 Manutençãojuliano30profNo ratings yet
- O ComputadorDocument4 pagesO ComputadorOtávio FilhoNo ratings yet
- Sistemas Operacionais na PUC MinasDocument8 pagesSistemas Operacionais na PUC MinasJoyceNaraBarbosaNo ratings yet
- InfoPLD - Plano de Continuidade de Negócio 20140728-revGERIN PDFDocument11 pagesInfoPLD - Plano de Continuidade de Negócio 20140728-revGERIN PDFRicardo Abu HanaNo ratings yet
- Correção do fator de potência: tecnologia e linhas de produtosDocument44 pagesCorreção do fator de potência: tecnologia e linhas de produtosSuelem SantosNo ratings yet
- Qualidade da Energia FundamentosDocument130 pagesQualidade da Energia FundamentosMarcos S.'.No ratings yet
- Laércio Vasconcelos - Programas de Diagnóstico PART 1Document23 pagesLaércio Vasconcelos - Programas de Diagnóstico PART 1pedrosantos86No ratings yet
- Manual - Telefone Siemens Gigaset SL 5010Document33 pagesManual - Telefone Siemens Gigaset SL 5010Gil NerisNo ratings yet
- Desenho e Projeto de Tubulação IndustrialDocument31 pagesDesenho e Projeto de Tubulação IndustrialJosé Luis Moura100% (1)
- Criando Itens MágicosDocument25 pagesCriando Itens MágicosSerzedelo NetoNo ratings yet
- Controlador Programável MPC4004 Ref. 3-0019.210 Manual Rev. 2.10 Agosto/2001Document146 pagesControlador Programável MPC4004 Ref. 3-0019.210 Manual Rev. 2.10 Agosto/2001Leandro FernandesNo ratings yet
- Normas CAF 2022/2023Document6 pagesNormas CAF 2022/2023LauraNo ratings yet
- Apol - S SeDocument12 pagesApol - S SeDavi & Elessandra100% (1)
- Manual MikroC PRO em PortuguesDocument726 pagesManual MikroC PRO em PortuguesDarilho Batista Ignacio100% (2)
- Registro de profissionais e carteira de identidadeDocument12 pagesRegistro de profissionais e carteira de identidaderglcostaNo ratings yet
- Slides Lideranca Gestao Energias 211023pdf PortuguesDocument82 pagesSlides Lideranca Gestao Energias 211023pdf PortuguesxtamixNo ratings yet
- David Gerrold - O Diabólico Cérebro EletrônicoDocument187 pagesDavid Gerrold - O Diabólico Cérebro EletrônicoJohabe Manassés100% (1)
- Arranjos de BarramentosDocument29 pagesArranjos de BarramentosAlice M.AlmeidaNo ratings yet
- Sistema Operacional SODocument47 pagesSistema Operacional SOSantyago PortelaNo ratings yet
- Rita Emmet - Não Deixe para Depois o Que Você Pode Fazer AgoraDocument7 pagesRita Emmet - Não Deixe para Depois o Que Você Pode Fazer AgoraMarcelo Victor0% (1)
- Por que estudar AssemblyDocument8 pagesPor que estudar AssemblyLincoln DiasNo ratings yet
- REGRAS - Volei de Praia - 2023Document68 pagesREGRAS - Volei de Praia - 2023Heloísa Ferreira Duarte BezerraNo ratings yet
- 17 QuestõesDocument3 pages17 QuestõesGustavo QueirozNo ratings yet