You might also like
- Fir Compiler Ds534Document83 pagesFir Compiler Ds534Manasa UpadhyayaNo ratings yet
- Fpga Implementation of Fir FilterDocument69 pagesFpga Implementation of Fir FilterDebashis Kar100% (1)
- Synplicity Efficient DSPDocument8 pagesSynplicity Efficient DSPravindarsinghNo ratings yet
- XC Sysgen43Document3 pagesXC Sysgen43YogeeshHtNo ratings yet
- Thesis 2002 K14h PDFDocument82 pagesThesis 2002 K14h PDFVishwajeet S BNo ratings yet
- FIR FilterDocument5 pagesFIR FilterManasa UpadhyayaNo ratings yet
- Power Area FILTERSDocument8 pagesPower Area FILTERSRasigan UrNo ratings yet
- MainPaper PallabDocument6 pagesMainPaper PallabkaoutarNo ratings yet
- FPGA Implementation of Digital FiltersDocument9 pagesFPGA Implementation of Digital FiltersMiguel PanduroNo ratings yet
- FPGA Paper PDFDocument18 pagesFPGA Paper PDFDhayanandhNo ratings yet
- Fpga Implementation of Digital FiltersDocument9 pagesFpga Implementation of Digital Filtersm1u2n3n4i5No ratings yet
- Systolic 1Document4 pagesSystolic 1Akilesh MDNo ratings yet
- 6.4.1. Complex FIR FilterDocument100 pages6.4.1. Complex FIR FilterTa DucNo ratings yet
- Fpgas and DSP: Design Alternatives For DSP SolutionsDocument8 pagesFpgas and DSP: Design Alternatives For DSP Solutionsnguyendinh126No ratings yet
- Performance Analysis of Reconfigurable Multiplier Unit For FIR Filter DesignDocument8 pagesPerformance Analysis of Reconfigurable Multiplier Unit For FIR Filter DesignInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Efficient Design Using Fpgas: of Application Specific CoresDocument5 pagesEfficient Design Using Fpgas: of Application Specific CoresK.GurucharanNo ratings yet
- Xtremedsp Solutions: Selection GuideDocument38 pagesXtremedsp Solutions: Selection GuideNithishkumar VenkatachalamNo ratings yet
- Fpga DSP WhitepaperDocument15 pagesFpga DSP Whitepaperzohair_r66No ratings yet
- VLSI ProjectsDocument4 pagesVLSI ProjectsMallisetty YaswanthNo ratings yet
- Fir Compiler XilinxDocument85 pagesFir Compiler Xilinxalisadan_92No ratings yet
- FPGA Implementation of MIMO AlgorithmsDocument4 pagesFPGA Implementation of MIMO AlgorithmsNors NoorNo ratings yet
- 28609262-Chameleon-Chips-Presentation (Compatibility Mode)Document24 pages28609262-Chameleon-Chips-Presentation (Compatibility Mode)मनोज मुंद्राNo ratings yet
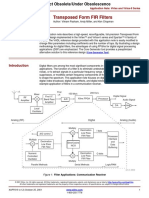
- Transposed Form FIR Filters: Core Generator ToolDocument13 pagesTransposed Form FIR Filters: Core Generator ToolRabab M AlyNo ratings yet
- White Paper Designing High-Performance DSP Hardware Using Catapult C Synthesis and The Altera Accelerated LibrariesDocument9 pagesWhite Paper Designing High-Performance DSP Hardware Using Catapult C Synthesis and The Altera Accelerated Librarieszahid52No ratings yet
- What Is An FPGA?: Figure 1: FPGA Block StructureDocument10 pagesWhat Is An FPGA?: Figure 1: FPGA Block Structureacer551100% (1)
- 10 Hymel Conger AbstractDocument2 pages10 Hymel Conger AbstractTamiltamil TamilNo ratings yet
- Hale 2018Document4 pagesHale 2018aham krishnahaNo ratings yet
- Chameleon ChipDocument26 pagesChameleon Chipkrushang kananiNo ratings yet
- Chameleon Chips PresentationDocument24 pagesChameleon Chips Presentationmanojreads100% (1)
- VHDL Code For FIR Filter PDFDocument4 pagesVHDL Code For FIR Filter PDFpankaj5121990No ratings yet
- FPGA Implementation of FIR Filters Using Pipelined Bit-Serial CSD MultipliersDocument34 pagesFPGA Implementation of FIR Filters Using Pipelined Bit-Serial CSD MultipliersSARATH MOHANDASNo ratings yet
- A Framework For The Design of High Speed Fir Filters On FpgasDocument4 pagesA Framework For The Design of High Speed Fir Filters On Fpgasamit1411narkhedeNo ratings yet
- Application-Specific Instruction-Set Processors (Asips) Are An Emerging Design ParadigmDocument2 pagesApplication-Specific Instruction-Set Processors (Asips) Are An Emerging Design ParadigmAjay Kumar KNo ratings yet
- The Quicklogic Solution: Build Flexibility and Differentiation Into Your Next Low Power SocDocument2 pagesThe Quicklogic Solution: Build Flexibility and Differentiation Into Your Next Low Power SocSGSNo ratings yet
- Why Con Gurable Computing? The Computational Density Advantage of Con Gurable ArchitecturesDocument17 pagesWhy Con Gurable Computing? The Computational Density Advantage of Con Gurable ArchitecturesHari KrishnaNo ratings yet
- Chameleon ChipDocument21 pagesChameleon ChipbiswalsantoshNo ratings yet
- NI Tutorial 9700 enDocument5 pagesNI Tutorial 9700 enharivarahiNo ratings yet
- FPGA Vs ASICDocument9 pagesFPGA Vs ASICKamleshNo ratings yet
- In This Article, Eric Gives An Overview of The Benefits of Using Fpgas in DSP Design and Concludes With A List of Recommended Design RulesDocument3 pagesIn This Article, Eric Gives An Overview of The Benefits of Using Fpgas in DSP Design and Concludes With A List of Recommended Design Rulesvikas310No ratings yet
- Design of Multiplier Less 32 Tap FIR Filter Using VHDL: JournalDocument5 pagesDesign of Multiplier Less 32 Tap FIR Filter Using VHDL: JournalIJMERNo ratings yet
- Chameleon ChipDocument21 pagesChameleon Chip429by3100% (1)
- Lab Report g10Document8 pagesLab Report g10Amit DipankarNo ratings yet
- FPGA Technology XilinxDocument48 pagesFPGA Technology XilinxHossam FadeelNo ratings yet
- Roba Multiplier: A Rounding-Based Approximate Multiplier For High-Speed Yet Energy-Efficient Digital Signal ProcessingDocument9 pagesRoba Multiplier: A Rounding-Based Approximate Multiplier For High-Speed Yet Energy-Efficient Digital Signal ProcessingRatnakarVarunNo ratings yet
- Plasma: An FPGA For Million Gate Systems: 1. AbstractDocument7 pagesPlasma: An FPGA For Million Gate Systems: 1. AbstractDecky SetiyantoNo ratings yet
- Embedded Systems Design with Platform FPGAs: Principles and PracticesFrom EverandEmbedded Systems Design with Platform FPGAs: Principles and PracticesRating: 5 out of 5 stars5/5 (1)
- IMPLEMENTING DIGITAL FILTERS WITH FPGASDocument2 pagesIMPLEMENTING DIGITAL FILTERS WITH FPGASbshashank90No ratings yet
- Haps70 BrochureDocument10 pagesHaps70 BrochureJohnNo ratings yet
- Low-power DA architectures for FIR filtersDocument5 pagesLow-power DA architectures for FIR filtersAbhijeet VatsNo ratings yet
- Application-Specific Customization of Fpga: Parameterized Soft-Core ProcessorsDocument8 pagesApplication-Specific Customization of Fpga: Parameterized Soft-Core ProcessorsK.GurucharanNo ratings yet
- Modified DA Based FIR Filter in Multirate DSP Systems On FPGADocument5 pagesModified DA Based FIR Filter in Multirate DSP Systems On FPGAEditor IJRITCCNo ratings yet
- ullah2021Document14 pagesullah2021roopa_kothapalliNo ratings yet
- Smart Card:: Smart Cards-What Are They?Document12 pagesSmart Card:: Smart Cards-What Are They?infernobibekNo ratings yet
- Altera Assessing FPGA DSP Benchmarks at 40 NMDocument6 pagesAltera Assessing FPGA DSP Benchmarks at 40 NMkn65238859No ratings yet
- Embedded Systems Unit I Part A (2 Marks)Document47 pagesEmbedded Systems Unit I Part A (2 Marks)Vijaya KumarNo ratings yet
- Digital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingFrom EverandDigital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingRating: 5 out of 5 stars5/5 (1)
- Consent For Transfer of Citi Relationships To Axis Bank: BackgroundDocument8 pagesConsent For Transfer of Citi Relationships To Axis Bank: Backgroundvikas310No ratings yet
- Verilog Quick Reference CardDocument12 pagesVerilog Quick Reference CardHector CabreraNo ratings yet
- Liberty Cashback TNCDocument22 pagesLiberty Cashback TNCvikas310No ratings yet
- Using Fpgas To Improve The Performance of Radar, Navigation and Guidance SystemsDocument7 pagesUsing Fpgas To Improve The Performance of Radar, Navigation and Guidance Systemsvikas310No ratings yet
- Fifos in Virtex-5 Fpgas: By: Peter AlfkeDocument3 pagesFifos in Virtex-5 Fpgas: By: Peter Alfkevikas310No ratings yet
- The Six Thinking HatsDocument16 pagesThe Six Thinking Hatsvikas310No ratings yet
- Elements of Sound JudgmentDocument57 pagesElements of Sound Judgmentvikas310No ratings yet
- Fifos in Virtex-5 Fpgas: By: Peter AlfkeDocument3 pagesFifos in Virtex-5 Fpgas: By: Peter Alfkevikas310No ratings yet
- In This Article, Eric Gives An Overview of The Benefits of Using Fpgas in DSP Design and Concludes With A List of Recommended Design RulesDocument3 pagesIn This Article, Eric Gives An Overview of The Benefits of Using Fpgas in DSP Design and Concludes With A List of Recommended Design Rulesvikas310No ratings yet
- Never Design Another FIFODocument2 pagesNever Design Another FIFOvikas310No ratings yet
- wp272 PDFDocument7 pageswp272 PDFKi KiNo ratings yet
- Bit Error Ratio: What Is It? What Does It Mean?: WP322 (v1.0) March 28, 2008Document4 pagesBit Error Ratio: What Is It? What Does It Mean?: WP322 (v1.0) March 28, 2008vikas310No ratings yet
- Designing A Spartan-3 FPGA DDR Memory InterfaceDocument2 pagesDesigning A Spartan-3 FPGA DDR Memory Interfacevikas310No ratings yet
- 8Document14 pages8vikas310No ratings yet
- Designing A Spartan-3 FPGA DDR Memory InterfaceDocument2 pagesDesigning A Spartan-3 FPGA DDR Memory Interfacevikas310No ratings yet
- HDL Coding and Design Practices For Improving Virtex-5 Utilization, Performance, and PowerDocument4 pagesHDL Coding and Design Practices For Improving Virtex-5 Utilization, Performance, and Powervikas310No ratings yet
- Using Fpgas To Improve The Performance of Radar, Navigation and Guidance SystemsDocument7 pagesUsing Fpgas To Improve The Performance of Radar, Navigation and Guidance Systemsvikas310No ratings yet
- 2 Stamoulis VHDLDATE98Document7 pages2 Stamoulis VHDLDATE98vikas310No ratings yet
- HDL Coding and Design Practices For Improving Virtex-5 Utilization, Performance, and PowerDocument4 pagesHDL Coding and Design Practices For Improving Virtex-5 Utilization, Performance, and Powervikas310No ratings yet
- Syllabi GATE2017 PDFDocument73 pagesSyllabi GATE2017 PDFAnkit Kumar AJNo ratings yet
- Ric or Secret Key Cryptography and Asymmetric or Public Key Cryptography. SymmetDocument12 pagesRic or Secret Key Cryptography and Asymmetric or Public Key Cryptography. Symmetvikas310No ratings yet
- WP 01183 Automotive Radar SocfpgaDocument16 pagesWP 01183 Automotive Radar SocfpgaNaim Maktumbi NesaragiNo ratings yet
- The Data Encryption Standard (DES)Document12 pagesThe Data Encryption Standard (DES)RajwecNo ratings yet
- Usage Models For Multi-Gigabit Serial Transceivers: WP157 (v1.0) March 15, 2002Document10 pagesUsage Models For Multi-Gigabit Serial Transceivers: WP157 (v1.0) March 15, 2002vikas310No ratings yet
- Brochure GATE2017Document63 pagesBrochure GATE2017Anonymous wcudDEXNo ratings yet
- Fifos in Virtex-5 Fpgas: By: Peter AlfkeDocument3 pagesFifos in Virtex-5 Fpgas: By: Peter Alfkevikas310No ratings yet
- Computer Security - Network SecurityDocument32 pagesComputer Security - Network Securityvikas310No ratings yet
- Cloud Comp SynopsisDocument10 pagesCloud Comp Synopsisvikas310No ratings yet
- 2004 Comms Design Digital VerificationDocument2 pages2004 Comms Design Digital Verificationvikas310No ratings yet
- Ontrac Major Technical FeaturesDocument3 pagesOntrac Major Technical FeaturesAnnie De WildeNo ratings yet
- User-Friendly and Communicative!: Altivar 312Document11 pagesUser-Friendly and Communicative!: Altivar 312Sayed Ibrahim GhanemNo ratings yet
- Borland® C#Builder™Document12 pagesBorland® C#Builder™BharatiyulamNo ratings yet
- Warner AZ400 SlidesDocument93 pagesWarner AZ400 SlidesYegnasivasaiNo ratings yet
- Unit II Bca NotesDocument24 pagesUnit II Bca NotesSiyana SriNo ratings yet
- CMOS transistor level schematics and stick diagrams for logic gatesDocument8 pagesCMOS transistor level schematics and stick diagrams for logic gatesDeepak Verma100% (3)
- Rocktron Midi Mate User ManualDocument32 pagesRocktron Midi Mate User ManualBlack MammbaNo ratings yet
- AIX TSM Client Installation and ConfigurationDocument5 pagesAIX TSM Client Installation and ConfigurationrutulNo ratings yet
- Adsl Router User ManualDocument34 pagesAdsl Router User ManualRolando NoroñaNo ratings yet
- MITSUKUNI - SHINOHARA CybersecurityDocument5 pagesMITSUKUNI - SHINOHARA CybersecurityAshwani kumarNo ratings yet
- TECHNICAL BULLETIN ECOSYS M3145idn/M3645idn: SubjectDocument19 pagesTECHNICAL BULLETIN ECOSYS M3145idn/M3645idn: SubjectItachi CampoNo ratings yet
- RS3785 - Grade - 10 MicroprocessorDocument104 pagesRS3785 - Grade - 10 MicroprocessorAshish Banstola90% (10)
- Supplier Conversion Code Ver1.7Document20 pagesSupplier Conversion Code Ver1.7nagaNo ratings yet
- Parallel and Distributed Computing Lecture 02Document17 pagesParallel and Distributed Computing Lecture 02abdullah ashrafNo ratings yet
- RPA Architecture OverviewDocument4 pagesRPA Architecture Overviewrohan tiwariNo ratings yet
- Crack Python Interview Part 2Document9 pagesCrack Python Interview Part 2Tgowtham ArasuNo ratings yet
- Sinr Pucch Pusch SrsDocument31 pagesSinr Pucch Pusch SrsJr MgNo ratings yet
- NetEngine 8000 X4X8 V800R022C00 Upgrade GuideDocument104 pagesNetEngine 8000 X4X8 V800R022C00 Upgrade GuideThiago Sampaio RichterNo ratings yet
- University Student Registration SystemDocument62 pagesUniversity Student Registration Systemكرارابوگلل0% (1)
- URTEC-208344-MS 3D Seismic Facies Classification On CPU and GPU HPC ClustersDocument14 pagesURTEC-208344-MS 3D Seismic Facies Classification On CPU and GPU HPC ClustersFät MãNo ratings yet
- HVPD Kronos Ultimate Software - BrandedDocument48 pagesHVPD Kronos Ultimate Software - BrandedAndrie PrasetyoNo ratings yet
- STLDDocument1 pageSTLDdasari_reddy100% (1)
- Sic MCQDocument67 pagesSic MCQshin chanNo ratings yet
- Toshiba B-EV4 DatasheetDocument2 pagesToshiba B-EV4 DatasheetPrayosa0% (1)
- BA Learning MaterialDocument212 pagesBA Learning MaterialSai VenkatNo ratings yet
- Praxis Seminar Panama 18-19 Oct 2018Document99 pagesPraxis Seminar Panama 18-19 Oct 2018Niza VidalNo ratings yet
- Rhel 8 Mock Paper IDocument5 pagesRhel 8 Mock Paper Idhc14301No ratings yet
- EE17401-Measurements and Instrumentation Unit - V: Optical Encoder Type Digital TransducerDocument18 pagesEE17401-Measurements and Instrumentation Unit - V: Optical Encoder Type Digital TransduceravsNo ratings yet
- UFED Physical Analyzer v5.0 Manual March2016Document238 pagesUFED Physical Analyzer v5.0 Manual March2016Allan StuartNo ratings yet
- CSI104 REVIEWDocument6 pagesCSI104 REVIEWNguyen Duc Anh K17HLNo ratings yet