You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- TOR and Specs For SurveyDocument3 pagesTOR and Specs For Surveymchkpp0% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tektronix Rsa306 Bb60c Comparison ChartDocument1 pageTektronix Rsa306 Bb60c Comparison ChartDolNo ratings yet
- Tektronix Rsa306 Bb60c Comparison ChartDocument1 pageTektronix Rsa306 Bb60c Comparison ChartDolNo ratings yet
- HRO Catalog Spring Summer 2021Document125 pagesHRO Catalog Spring Summer 2021stanpjames2309No ratings yet
- 135 KHZ LF Band Front End FilterDocument2 pages135 KHZ LF Band Front End Filterstanpjames2309No ratings yet
- High Performance Low Cost 1.8 To 54 MHZ Low Pass Filter - K8CUDocument6 pagesHigh Performance Low Cost 1.8 To 54 MHZ Low Pass Filter - K8CUstanpjames2309No ratings yet
- Crystal Oscillator Basics and Crystal Selection For frPIC - TM Và PICmicro DevicesDocument14 pagesCrystal Oscillator Basics and Crystal Selection For frPIC - TM Và PICmicro DevicesHao ChungNo ratings yet
- SDR Part 4 PDFDocument12 pagesSDR Part 4 PDFCuem EmcuNo ratings yet
- MAP FicheProduit ENDocument1 pageMAP FicheProduit ENstanpjames2309No ratings yet
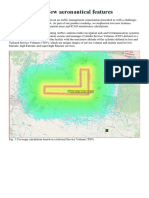
- HTZ Supports Aeronautical FeaturesDocument4 pagesHTZ Supports Aeronautical Featuresstanpjames2309No ratings yet
- 101-156 CaspersDocument56 pages101-156 CaspersAlberto SaldivarNo ratings yet
- Parallel Coupled Line Notch Filter With Wide Spurious-Free PassbandsDocument5 pagesParallel Coupled Line Notch Filter With Wide Spurious-Free Passbandsstanpjames2309No ratings yet
- CERAMIC FILTER For AM ReceiversDocument16 pagesCERAMIC FILTER For AM Receiversstanpjames2309No ratings yet
- A Few Words About Intermodulation Dynamic Range and Roofing FiltersDocument6 pagesA Few Words About Intermodulation Dynamic Range and Roofing Filtersstanpjames2309No ratings yet
- RF MEMS Filters RF MEMS Filters RF MEMS Filters RF MEMS FiltersDocument38 pagesRF MEMS Filters RF MEMS Filters RF MEMS Filters RF MEMS Filtersstanpjames2309No ratings yet
- The History and Future of Wi Fi Po en 3609 6206 82 v0101Document1 pageThe History and Future of Wi Fi Po en 3609 6206 82 v0101monel_24671No ratings yet
- Filter Fundamentals for Generating SSB SignalsDocument8 pagesFilter Fundamentals for Generating SSB Signalsstanpjames2309No ratings yet
- Mechanical Filters-A Review of Progress IEEE 1971Document16 pagesMechanical Filters-A Review of Progress IEEE 1971stanpjames2309No ratings yet
- Rob's 4.4kHz Crystal FilterDocument7 pagesRob's 4.4kHz Crystal Filterstanpjames2309No ratings yet
- Impedance MatchingDocument24 pagesImpedance Matchingstanpjames2309No ratings yet
- External Processing For Controlled Envelope Single Sideband Hershberger - QEX - 1 - 16Document4 pagesExternal Processing For Controlled Envelope Single Sideband Hershberger - QEX - 1 - 16stanpjames2309No ratings yet
- 9 MHZ Filters Built With Inexpensive CrystalsDocument11 pages9 MHZ Filters Built With Inexpensive Crystalsstanpjames2309No ratings yet
- BPF and MXF Series Bandpass FiltersDocument2 pagesBPF and MXF Series Bandpass Filtersstanpjames2309No ratings yet
- By D. B. Gain: The RTL SDR V3Document13 pagesBy D. B. Gain: The RTL SDR V3stanpjames2309No ratings yet
- Crystal Oscillator Basics and Crystal Selection For frPIC - TM Và PICmicro DevicesDocument14 pagesCrystal Oscillator Basics and Crystal Selection For frPIC - TM Và PICmicro DevicesHao ChungNo ratings yet
- 9 MHZ Filters Built With Inexpensive CrystalsDocument11 pages9 MHZ Filters Built With Inexpensive Crystalsstanpjames2309No ratings yet
- Wireless Telegraphy and Telephony MorganDocument215 pagesWireless Telegraphy and Telephony Morganstanpjames2309No ratings yet
- Crystal Test SetDocument8 pagesCrystal Test Setstanpjames2309No ratings yet
- Altair Winprop: Wave Propagation and Radio Network PlanningDocument2 pagesAltair Winprop: Wave Propagation and Radio Network Planningstanpjames2309No ratings yet
- A Practical Approach To Spectrum Analyzing Unit Using RTL-SDRDocument10 pagesA Practical Approach To Spectrum Analyzing Unit Using RTL-SDRstanpjames2309No ratings yet
- KiwiSDR TDOA - First ExperiencesDocument22 pagesKiwiSDR TDOA - First Experiencesstanpjames2309No ratings yet
- SYLLABYUSDocument21 pagesSYLLABYUSnehaNo ratings yet
- Prime MeridianDocument3 pagesPrime MeridianMukesh NalekarNo ratings yet
- Cultural GeographyDocument24 pagesCultural Geographynananajep0% (2)
- CELESTIAL NAVIGATION Module 1Document3 pagesCELESTIAL NAVIGATION Module 1Sharmaine L. LozanoNo ratings yet
- Social ScienceDocument3 pagesSocial ScienceJerry De Leon LptNo ratings yet
- Aircraft Navigation SystemsDocument15 pagesAircraft Navigation SystemsShawn100% (1)
- Surveying ReviewerDocument2 pagesSurveying ReviewerRochelle Adajar-Bacalla100% (2)
- Mapping of Nickel Laterite Resources Using GeograpDocument6 pagesMapping of Nickel Laterite Resources Using GeograpAdi YuswantoNo ratings yet
- DRC Application Ombelle 300 Ne 3Rd Street Fort Lauderdale, FL Date Submitted: 04/21/2022Document85 pagesDRC Application Ombelle 300 Ne 3Rd Street Fort Lauderdale, FL Date Submitted: 04/21/2022the next miami100% (1)
- BUTTIMER 2006 - Reflections On Geography, Religion and Belief SystemsDocument7 pagesBUTTIMER 2006 - Reflections On Geography, Religion and Belief SystemsfjtoroNo ratings yet
- Visual Analysis of River Corridor LandscapesDocument5 pagesVisual Analysis of River Corridor LandscapesReza Dwi PranataNo ratings yet
- 3 Source of Data and ProjectionDocument30 pages3 Source of Data and Projectionranjan08838No ratings yet
- Mapping Aarey A Study of The Impacts ofDocument55 pagesMapping Aarey A Study of The Impacts ofAyan GhareNo ratings yet
- MODULE 3.3 A - STRUCTURAL GEOMORPHOLOGY - EROSION AND LANDSCAPE EVOLUTIONDocument25 pagesMODULE 3.3 A - STRUCTURAL GEOMORPHOLOGY - EROSION AND LANDSCAPE EVOLUTIONStephen ErickNo ratings yet
- Foreign PolicyDocument6 pagesForeign Policyadeel ahmadNo ratings yet
- AP Board 8th Class Social Studies Solutions Chapter 1 Reading and Analysis of Maps - AP Board SolutionsDocument9 pagesAP Board 8th Class Social Studies Solutions Chapter 1 Reading and Analysis of Maps - AP Board SolutionsvenkataNo ratings yet
- Test Bank For Discovering GIS and ArcGIS Pro, 3e Bradley Shellito Test BankDocument5 pagesTest Bank For Discovering GIS and ArcGIS Pro, 3e Bradley Shellito Test BankNail BaskoNo ratings yet
- PP Instructional Materials For Social StudiesDocument19 pagesPP Instructional Materials For Social StudiesAnonymous kiom0L1FqsNo ratings yet
- Cartography: Introduction Datum - Vertical - HorizontalDocument61 pagesCartography: Introduction Datum - Vertical - HorizontalkeerthanamaniNo ratings yet
- Geography Part 3Document154 pagesGeography Part 3CRISTIANO ronaldo100% (1)
- Semi Final Examination Plotting and Navigation ProblemsDocument13 pagesSemi Final Examination Plotting and Navigation Problemsnerissa belloNo ratings yet
- Inception ReportDocument29 pagesInception ReportRUMM100% (1)
- GPHY 422 Course Outline - 110108Document7 pagesGPHY 422 Course Outline - 110108Joel s Koroma100% (1)
- Basics of SurveyingDocument48 pagesBasics of SurveyingMichael MutaleNo ratings yet
- Amerigo VespucciDocument4 pagesAmerigo Vespucciapi-273737114No ratings yet
- MA 4th Sem CBCS Summer 2020 Exam TimetableDocument6 pagesMA 4th Sem CBCS Summer 2020 Exam TimetableAkash RautNo ratings yet
- Notes - USST 7 Geography of South AsiaDocument2 pagesNotes - USST 7 Geography of South AsiaAyesha Syed0% (1)
- Infografia en InglesDocument1 pageInfografia en InglesVasquez Velquez100% (1)
- Kong, Lily - Popular Music in Geographical AnalysesDocument33 pagesKong, Lily - Popular Music in Geographical AnalysesDébora GomesNo ratings yet