You might also like
- Ley Del Deporte Educacin Fsica y Recreacin 11 de Agosto de 20101Document26 pagesLey Del Deporte Educacin Fsica y Recreacin 11 de Agosto de 20101Misael AntonioNo ratings yet
- C6 Representacion ProcesosDocument48 pagesC6 Representacion ProcesosDavid EcheverryNo ratings yet
- ImpDocument2 pagesImpnerioalfonsoNo ratings yet
- Ducto de Gases 3Document1 pageDucto de Gases 3nerioalfonsoNo ratings yet
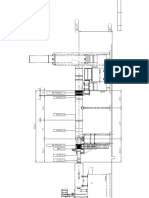
- Area Existente: Planta de Losa N. +10.35Document1 pageArea Existente: Planta de Losa N. +10.35nerioalfonsoNo ratings yet
- Cavitacion-Solucion A Sus Necesidades de BombeoDocument2 pagesCavitacion-Solucion A Sus Necesidades de BombeoJorge Santos RomeroNo ratings yet
- S 0305 Medici On Caudal 1Document29 pagesS 0305 Medici On Caudal 1Postillo Espinoza MessiasNo ratings yet
- Ducto de Gases 1Document1 pageDucto de Gases 1nerioalfonsoNo ratings yet
- MingaDocument95 pagesMinganerioalfonsoNo ratings yet
- Vista Aero EnfriadoresDocument1 pageVista Aero EnfriadoresnerioalfonsoNo ratings yet
- Ducto de Gases 2Document1 pageDucto de Gases 2nerioalfonsoNo ratings yet
- Gato - Hoja1Document1 pageGato - Hoja1nerioalfonsoNo ratings yet
- MAteriales Skid BlendingDocument1 pageMAteriales Skid BlendingnerioalfonsoNo ratings yet
- Proyectos Con ChimneasDocument5 pagesProyectos Con ChimneasnerioalfonsoNo ratings yet
- Area Existente: Planta de Losa N. +15.55Document1 pageArea Existente: Planta de Losa N. +15.55nerioalfonsoNo ratings yet
- Petroecuador: Emitido paraDocument1 pagePetroecuador: Emitido paranerioalfonsoNo ratings yet
- Tipicos de Construccion SercoELDocument17 pagesTipicos de Construccion SercoELnerioalfonsoNo ratings yet
- Herramientas para Construcción de TanquesDocument7 pagesHerramientas para Construcción de TanquesnerioalfonsoNo ratings yet
- 30 FrasesDocument1 page30 FrasesnerioalfonsoNo ratings yet
- Formulario 13 Metodologia de Construccion TermogasDocument1 pageFormulario 13 Metodologia de Construccion TermogasnerioalfonsoNo ratings yet
- Caso Sprint - Analisis.Document1 pageCaso Sprint - Analisis.nerioalfonsoNo ratings yet
- Especificaciones TecnicasDocument143 pagesEspecificaciones TecnicasnerioalfonsoNo ratings yet
- Transport AdoresDocument4 pagesTransport AdoresPaolaNo ratings yet
- Petroecuador: Emitido paraDocument1 pagePetroecuador: Emitido paranerioalfonsoNo ratings yet
- El Terreno Mecanica de Suelos - Matilde González UPCDocument308 pagesEl Terreno Mecanica de Suelos - Matilde González UPCjulian_andres51100% (5)
- Petroecuador: Emitido paraDocument1 pagePetroecuador: Emitido paranerioalfonsoNo ratings yet
- Proyectos Con ChimneasDocument5 pagesProyectos Con ChimneasnerioalfonsoNo ratings yet
- Aislamiento PDFDocument8 pagesAislamiento PDFJose RamonNo ratings yet
- Userdefinedline-6"-H1A3: PetroecuadorDocument1 pageUserdefinedline-6"-H1A3: PetroecuadornerioalfonsoNo ratings yet
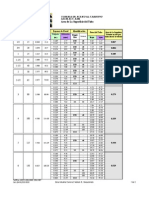
- Tabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6Document3 pagesTabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6reblas100% (6)
- Calculo III 0253Document317 pagesCalculo III 0253DarkKaizerNo ratings yet
- Linealizar Entrada 4 A 20 MaDocument6 pagesLinealizar Entrada 4 A 20 MaJuan Carlos CosmeNo ratings yet
- Examen Final Programacion Iis 2021Document6 pagesExamen Final Programacion Iis 2021Samuel Mosquera GranadosNo ratings yet
- Regresion-Lineal-inter PolinomialDocument7 pagesRegresion-Lineal-inter PolinomialMaribel RmNo ratings yet
- ACTIVIDAD 2 (TEAMS) Probabilidad y EstadisticaDocument7 pagesACTIVIDAD 2 (TEAMS) Probabilidad y EstadisticaIsa Loewen SkarbnikNo ratings yet
- Raíces Reales GeneralDocument2 pagesRaíces Reales Generalvictor_1981No ratings yet
- Admision Unet Examen Resuelto Paso A PasoDocument8 pagesAdmision Unet Examen Resuelto Paso A Pasonelsonbap1100% (1)
- PACIDocument18 pagesPACIPamela AndreaNo ratings yet
- S11.s2 - MaterialDocument18 pagesS11.s2 - MaterialMaritzaNo ratings yet
- Dialnet ProgramacionFuncionalYLambdaCalculo 4902465 PDFDocument11 pagesDialnet ProgramacionFuncionalYLambdaCalculo 4902465 PDFhumbertoNo ratings yet
- Apuntes Clase 17 Marzo Analisis NumericoDocument17 pagesApuntes Clase 17 Marzo Analisis Numericojoshua medinaNo ratings yet
- Universidad Nacional Abierta Enseñanza MatematicaDocument27 pagesUniversidad Nacional Abierta Enseñanza MatematicaDubraska SilvaNo ratings yet
- Ecuaciones diferenciales homogéneas: métodos de resoluciónDocument13 pagesEcuaciones diferenciales homogéneas: métodos de resoluciónJose Milton Guardia MamaniNo ratings yet
- Libro Bruño 1º EsoDocument108 pagesLibro Bruño 1º EsoMaria Rodriguez80% (5)
- Cruz DemostrativaDocument1 pageCruz DemostrativaKarito Lisleit Rufino Saavedra100% (1)
- Tutorial Matlab - Computación Aplicada A Sistemas Eléctricos de PotenciaDocument48 pagesTutorial Matlab - Computación Aplicada A Sistemas Eléctricos de PotenciaAldo Ulises Rivas RosasNo ratings yet
- Iv Metodo de AsignacionDocument5 pagesIv Metodo de AsignacionLisandro AsmarNo ratings yet
- Ecuaciones de empalme para 16 problemas de trazado vialDocument16 pagesEcuaciones de empalme para 16 problemas de trazado vialJhonatan RamirezNo ratings yet
- Semana #2. RadicacionDocument4 pagesSemana #2. RadicaciondavidNo ratings yet
- Limites TextoDocument23 pagesLimites Textodaniel mamaniNo ratings yet
- División con dos dígitos y un dígitoDocument9 pagesDivisión con dos dígitos y un dígitoIda AguilarNo ratings yet
- 00 Fonctions ReelesDocument34 pages00 Fonctions ReelesAntonio OsorioNo ratings yet
- Medidas de posición y dispersión en estadística biomédicaDocument40 pagesMedidas de posición y dispersión en estadística biomédicaLorenzo AnsaldiNo ratings yet
- G.apr - No.004 Mat.11 Heider LinaresDocument6 pagesG.apr - No.004 Mat.11 Heider LinaresLomo OhgNo ratings yet
- Núcleo 1 - Actividad de AprendizajeDocument4 pagesNúcleo 1 - Actividad de AprendizajeMarcela ReyesNo ratings yet
- Matematica ContinentalñDocument6 pagesMatematica ContinentalñUriel QuispeNo ratings yet
- Capitulo 1-Repaso de AlgebraDocument45 pagesCapitulo 1-Repaso de AlgebraCarlos VargasNo ratings yet
- Antunes, Celso - Como Desarrollar Contenidos Aplicando Las Inteligencias MultiplesDocument50 pagesAntunes, Celso - Como Desarrollar Contenidos Aplicando Las Inteligencias MultiplesGrover Adán Tapia Domínguez100% (2)
- TrabajoColaborativoTarea 3grupo100410 - 90 CalculoDocument36 pagesTrabajoColaborativoTarea 3grupo100410 - 90 CalculoXimenaQuevedoNo ratings yet