You might also like
- Ameribar: Action Plans and Sample SchedulesDocument1 pageAmeribar: Action Plans and Sample SchedulesBrianna Bar PrepNo ratings yet
- Hematology Guide for Anemia and Iron MetabolismDocument46 pagesHematology Guide for Anemia and Iron MetabolismGiannis GkouzionisNo ratings yet
- Spelling Bee Guide 2015Document13 pagesSpelling Bee Guide 2015Angela MarkovskaNo ratings yet
- School Learning and Development Plan For Head TeachersDocument3 pagesSchool Learning and Development Plan For Head TeachersLiza Bacudo100% (1)
- Brooklyn Friends School SP 2008Document20 pagesBrooklyn Friends School SP 2008Kevin J RuthNo ratings yet
- Paper 8-The Role of Hyperspectral ImagingDocument13 pagesPaper 8-The Role of Hyperspectral Imagingshaikhzubair31100% (1)
- DNA Molecule & Central DogmaDocument43 pagesDNA Molecule & Central DogmaJoanna Ruth SeproNo ratings yet
- Spectral Matching Approaches in Hyperspectral Image ProcessingDocument22 pagesSpectral Matching Approaches in Hyperspectral Image ProcessingMohammad Avaz SadaatNo ratings yet
- Activity 1:individual ActivityDocument3 pagesActivity 1:individual ActivityErika Mae NarvaezNo ratings yet
- Nonaka and Takeuchi Knowledge Spiral ModelDocument18 pagesNonaka and Takeuchi Knowledge Spiral ModelkangdediNo ratings yet
- Academic Word List PDFDocument28 pagesAcademic Word List PDFukchaudharyNo ratings yet
- A Review of Image Classification Approaches and TechniquesDocument6 pagesA Review of Image Classification Approaches and TechniquesArtur JNo ratings yet
- Hyperspectral Imaging: January 2018Document6 pagesHyperspectral Imaging: January 2018Rania ZaatourNo ratings yet
- Aplicaciones de Aprendizaje Profundo para Imágenes Hiperespectrales-Una Revisión SistemáticaDocument18 pagesAplicaciones de Aprendizaje Profundo para Imágenes Hiperespectrales-Una Revisión SistemáticaAlexcondzoNo ratings yet
- 17-082 Proof2Document19 pages17-082 Proof2Clément MoutardNo ratings yet
- Image analysis techniques for biologyDocument52 pagesImage analysis techniques for biologySaurabh Malik100% (1)
- MRI - Diffusion IQTDocument16 pagesMRI - Diffusion IQTRaiyanNo ratings yet
- Remote Sensing Image Scene Classification: Benchmark and State of The ArtDocument17 pagesRemote Sensing Image Scene Classification: Benchmark and State of The Artesmail ahmedNo ratings yet
- 1 s2.0 S2667102621000061 MainDocument10 pages1 s2.0 S2667102621000061 Mainwenjing bianNo ratings yet
- Proof of Concept - Bio-MarkerDocument5 pagesProof of Concept - Bio-MarkerbionicsNo ratings yet
- A Technique For Classification of High Resolution Satellite Images Using Object-Based SegmentationDocument12 pagesA Technique For Classification of High Resolution Satellite Images Using Object-Based SegmentationashishNo ratings yet
- A Survey On Frameworks and Techniques of Image Mining: J. KarthikeyanDocument8 pagesA Survey On Frameworks and Techniques of Image Mining: J. KarthikeyanRachana MedehalNo ratings yet
- Evaluation and Performance Analysis of Brain MRI Segmentation MethodsDocument10 pagesEvaluation and Performance Analysis of Brain MRI Segmentation MethodsNaresh GhorpadeNo ratings yet
- Satellite Image Classification With Deep Learning SurveyDocument5 pagesSatellite Image Classification With Deep Learning SurveyEditor IJTSRDNo ratings yet
- Deep Semantic Segmentation of Natural and Medical ImagesDocument21 pagesDeep Semantic Segmentation of Natural and Medical ImagesFang PreyNo ratings yet
- A New Approach For Clustering of X-Ray ImagesDocument5 pagesA New Approach For Clustering of X-Ray ImagesAbdullah AbdullahNo ratings yet
- Multimodal Medical Image Fusionbasedon Deep Learning Neural Networkfor Clinical Treatment AnalysisDocument18 pagesMultimodal Medical Image Fusionbasedon Deep Learning Neural Networkfor Clinical Treatment AnalysisngontingtopyarnaurNo ratings yet
- Sub Raja 2020Document5 pagesSub Raja 2020plovonrNo ratings yet
- Deep Learning Deep Learning HyperspectralDocument18 pagesDeep Learning Deep Learning Hyperspectralcarlosgg33No ratings yet
- Evaluation of Image Fusion AlgorithmsDocument5 pagesEvaluation of Image Fusion AlgorithmsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Abnormality Classification and Localization Using Dual - 2022 - Computers in BiDocument19 pagesAbnormality Classification and Localization Using Dual - 2022 - Computers in Bidebora eireneNo ratings yet
- Review of Image Recognition From Image RepositoryDocument5 pagesReview of Image Recognition From Image RepositoryIJRASETPublicationsNo ratings yet
- Deep learning fusion of CT, MRI, PET scansDocument18 pagesDeep learning fusion of CT, MRI, PET scansRakesh BandariNo ratings yet
- Advanced Spectral Classifiers For Hyperspectral Images A ReviewDocument25 pagesAdvanced Spectral Classifiers For Hyperspectral Images A ReviewAdduru U G SankararaoNo ratings yet
- (IJCST-V4I3P40) :chaitali Dhaware, Mrs. K. H. WanjaleDocument3 pages(IJCST-V4I3P40) :chaitali Dhaware, Mrs. K. H. WanjaleEighthSenseGroupNo ratings yet
- Satellite Image Classification Using Image Encoding and Artificial Neural NetworkDocument6 pagesSatellite Image Classification Using Image Encoding and Artificial Neural NetworkAniket PrakashNo ratings yet
- Overviewof Data Mining Techniquesand Image SegmentationDocument5 pagesOverviewof Data Mining Techniquesand Image SegmentationIIR indiaNo ratings yet
- Sustainability 13 01224 v2Document29 pagesSustainability 13 01224 v2truongthaoNo ratings yet
- Project Name: Center of Excellence in Artificial Intelligence For Medical Image SegmentationDocument6 pagesProject Name: Center of Excellence in Artificial Intelligence For Medical Image SegmentationDr. Aravinda C V NMAMITNo ratings yet
- 细粒度图像分类综述_申志军 (1)Document10 pages细粒度图像分类综述_申志军 (1)kanade000999No ratings yet
- Content-Based Medical Image Retrieval Using Low-LeDocument9 pagesContent-Based Medical Image Retrieval Using Low-Lezspksmg2mkNo ratings yet
- J Cageo 2014 07 006Document16 pagesJ Cageo 2014 07 006OmatoukNo ratings yet
- An Examination of Image Mining: Approaches, Techniques, and ApplicationDocument4 pagesAn Examination of Image Mining: Approaches, Techniques, and ApplicationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Information FusionDocument22 pagesInformation FusionJavi DoorsNo ratings yet
- Can Semantic Labeling Methods Generalize To Any City? The Inria Aerial Image Labeling BenchmarkDocument5 pagesCan Semantic Labeling Methods Generalize To Any City? The Inria Aerial Image Labeling BenchmarkGene Jh CheeNo ratings yet
- Feature Extraction With Multiscale Covariance Maps For Hyperspectral Image ClassificationDocument15 pagesFeature Extraction With Multiscale Covariance Maps For Hyperspectral Image ClassificationrekhaNo ratings yet
- A Comparison of X-Ray Image Segmentation TechniquesDocument8 pagesA Comparison of X-Ray Image Segmentation Techniquesdian anugrahNo ratings yet
- Hybrid Imaging Instrumentation and Data ProcessingDocument30 pagesHybrid Imaging Instrumentation and Data Processingsaleemparray614No ratings yet
- 2022 Zuo Deep Learning Optical Metrology ReviewDocument54 pages2022 Zuo Deep Learning Optical Metrology ReviewDiego Eusse NaranjoNo ratings yet
- RESUME SEMINAR ICoLiSTDocument4 pagesRESUME SEMINAR ICoLiSTpiko ahlanNo ratings yet
- Kumar 2021 J. Phys. - Conf. Ser. 1950 012087Document13 pagesKumar 2021 J. Phys. - Conf. Ser. 1950 012087Dharmi JaviyaNo ratings yet
- A Survey On Deep Learning Techniques For Medical Image Analysis RiyajDocument20 pagesA Survey On Deep Learning Techniques For Medical Image Analysis Riyajdisha rawal100% (1)
- 1119-Article Text-1850-1-10-20221018Document18 pages1119-Article Text-1850-1-10-20221018Srividya KondaguntaNo ratings yet
- Classifying Medical Images Using Synergic Deep LearningDocument8 pagesClassifying Medical Images Using Synergic Deep LearningAbdou TlmNo ratings yet
- K-Means and Image Processing Use in Histopathological Image AnalysisDocument6 pagesK-Means and Image Processing Use in Histopathological Image AnalysisFaiez Musa Lahmood AlrufayeNo ratings yet
- Sensor FormatMDPI Revised MajorDocument13 pagesSensor FormatMDPI Revised MajorJunaid BaberNo ratings yet
- Remote Sensing Image Classification A Comprehensiv PDFDocument24 pagesRemote Sensing Image Classification A Comprehensiv PDFHanin GamalNo ratings yet
- Bharath Simha Reddy 2021 IOP Conf. Ser. Mater. Sci. Eng. 1022 012020Document11 pagesBharath Simha Reddy 2021 IOP Conf. Ser. Mater. Sci. Eng. 1022 012020Fateeha Fatima TurkNo ratings yet
- Exploring The Usefulness of Light Field Camera For Biometrics: An Empirical Study On Face and Iris RecognitionDocument16 pagesExploring The Usefulness of Light Field Camera For Biometrics: An Empirical Study On Face and Iris RecognitionWafa BenzaouiNo ratings yet
- Guide to Image Processing Techniques for Plant Disease DetectionDocument20 pagesGuide to Image Processing Techniques for Plant Disease DetectionSayantan Banerjee100% (1)
- New Approaches to Image Processing based Failure Analysis of Nano-Scale ULSI DevicesFrom EverandNew Approaches to Image Processing based Failure Analysis of Nano-Scale ULSI DevicesRating: 5 out of 5 stars5/5 (1)
- Nihms 1034737Document42 pagesNihms 1034737mawara khanNo ratings yet
- Deep Learning Can See The Unseeable: Predicting Molecular Markers From MRI of Brain GliomasDocument7 pagesDeep Learning Can See The Unseeable: Predicting Molecular Markers From MRI of Brain GliomasPriyanka VermaNo ratings yet
- Image Registration Methods A SurveyDocument25 pagesImage Registration Methods A SurveyCillian MurphyNo ratings yet
- KK - SKS - C1 - A Hybrid Feature Modeling Approach For Content-Based Medical Image RetrievalDocument6 pagesKK - SKS - C1 - A Hybrid Feature Modeling Approach For Content-Based Medical Image Retrievalmuroorkarthik55No ratings yet
- Unsupervised Deep Feature Extraction For Remote Sensing Image ClassificationDocument14 pagesUnsupervised Deep Feature Extraction For Remote Sensing Image Classification于富昇No ratings yet
- Laporan Klasifikasi MultispektralDocument28 pagesLaporan Klasifikasi MultispektralOctavia AzzahrahNo ratings yet
- An Iterative Hyperspectral Image Segmentation Method Using A Cross Analysis of Spectral and Spatial InformationDocument11 pagesAn Iterative Hyperspectral Image Segmentation Method Using A Cross Analysis of Spectral and Spatial InformationAndreea CameliaNo ratings yet
- LED-Based Photoacoustic Imaging: From Bench to BedsideFrom EverandLED-Based Photoacoustic Imaging: From Bench to BedsideMithun Kuniyil Ajith SinghNo ratings yet
- Machine Learning-GkouzionisDocument14 pagesMachine Learning-GkouzionisGiannis GkouzionisNo ratings yet
- Machine Learning-GkouzionisDocument14 pagesMachine Learning-GkouzionisGiannis GkouzionisNo ratings yet
- Wavelet Decomposition - NotesDocument4 pagesWavelet Decomposition - NotesGiannis GkouzionisNo ratings yet
- Aliasing PDFDocument11 pagesAliasing PDFGiannis GkouzionisNo ratings yet
- Self LearningDocument3 pagesSelf LearningGiannis Gkouzionis0% (1)
- Cartoon and Texture Decomposition - NotesDocument3 pagesCartoon and Texture Decomposition - NotesGiannis GkouzionisNo ratings yet
- 1. Retinex based methods: Commented (ΛΚ1) : ΟιεικόνεςστησυνέχειααποσυντίθεταιολοκλDocument4 pages1. Retinex based methods: Commented (ΛΚ1) : ΟιεικόνεςστησυνέχειααποσυντίθεταιολοκλGiannis GkouzionisNo ratings yet
- Wavelet Decomposition - NotesDocument4 pagesWavelet Decomposition - NotesGiannis GkouzionisNo ratings yet
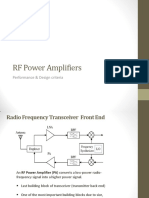
- RF AmpsDocument30 pagesRF AmpsGiannis GkouzionisNo ratings yet
- Filtered Back Projection NotesDocument5 pagesFiltered Back Projection NotesGiannis GkouzionisNo ratings yet
- Super ResolutionDocument1 pageSuper ResolutionGiannis GkouzionisNo ratings yet
- Super Resolution ApplicationsDocument2 pagesSuper Resolution ApplicationsGiannis GkouzionisNo ratings yet
- RF Low Noise AmpDocument28 pagesRF Low Noise AmpGiannis GkouzionisNo ratings yet
- Typeset Equations PDFDocument41 pagesTypeset Equations PDFGiannis GkouzionisNo ratings yet
- Mad21975 ch03Document22 pagesMad21975 ch03Aulia AmaniNo ratings yet
- Cell StructureDocument14 pagesCell StructureGiannis GkouzionisNo ratings yet
- Automata TheoryDocument53 pagesAutomata TheoryGiannis GkouzionisNo ratings yet
- BSC Modul 1: Electric Circuits Theory BasicsDocument52 pagesBSC Modul 1: Electric Circuits Theory BasicsGiannis GkouzionisNo ratings yet
- ACTION PLAN IN GUIDANCE S.Y. 2021-2022Document2 pagesACTION PLAN IN GUIDANCE S.Y. 2021-2022Maria Noly Villotes EntinoNo ratings yet
- Best AI Essay WriterDocument2 pagesBest AI Essay WriterPeter JhonsonNo ratings yet
- Models Show Nature's RealityDocument7 pagesModels Show Nature's RealityanaNo ratings yet
- Nota:: What Does She Dislike About Her Job?Document7 pagesNota:: What Does She Dislike About Her Job?JosefaNo ratings yet
- IT Week1Document11 pagesIT Week1Mustafa AdilNo ratings yet
- Daftar PustakaDocument7 pagesDaftar PustakaZulaicha MumarridzohNo ratings yet
- Edtpa Lesson Plan Guide LPGDocument5 pagesEdtpa Lesson Plan Guide LPGapi-660566244No ratings yet
- Cuti Sempena Tahun Baru Hijrah Isnin 3/10/2016Document8 pagesCuti Sempena Tahun Baru Hijrah Isnin 3/10/2016hafizah_90No ratings yet
- MODULE 4 Semantics 201 PDFDocument5 pagesMODULE 4 Semantics 201 PDFShean Jerica SalemNo ratings yet
- Block Brake With Long ShoeDocument9 pagesBlock Brake With Long ShoeAdarsh KumarNo ratings yet
- Lmpact of Global Is at Ion On LADAKH (A Cultural Perspective)Document4 pagesLmpact of Global Is at Ion On LADAKH (A Cultural Perspective)Prtk NayakNo ratings yet
- Social Work NotesDocument4 pagesSocial Work NoteszahidazizNo ratings yet
- Education Vietnam DevelopmentDocument39 pagesEducation Vietnam DevelopmentDwi SagittaNo ratings yet
- DLL - Wavespeed-WavelengthDocument4 pagesDLL - Wavespeed-WavelengthFilamae JunioNo ratings yet
- Cold Calling 26 AugDocument4 pagesCold Calling 26 AugGajveer SinghNo ratings yet
- The Scientific MethodDocument1 pageThe Scientific MethodPaulNo ratings yet
- Second Language Writing Challenges for Saudi LearnersDocument31 pagesSecond Language Writing Challenges for Saudi LearnersRamizNo ratings yet
- Adobe Scan Oct 19, 2023Document10 pagesAdobe Scan Oct 19, 2023niladriputatunda1No ratings yet
- Finan ResumeDocument3 pagesFinan ResumeNhat HoangNo ratings yet
- Spanish 2 Examen Final Presentacion Dia 1Document20 pagesSpanish 2 Examen Final Presentacion Dia 1api-263267469No ratings yet
- EmtlDocument707 pagesEmtlLaxmiSahithi100% (1)
- E LearningDocument58 pagesE Learningtummalapalli venkateswara rao100% (1)
- ICLTSET 24 BrochureDocument2 pagesICLTSET 24 BrochureGopinath SNo ratings yet