You might also like
- Ksync NotesDocument6 pagesKsync NotesRAMUNo ratings yet
- Instruction-Level Parallelism via Pipelining and Multiple IssueDocument21 pagesInstruction-Level Parallelism via Pipelining and Multiple IssuedanielNo ratings yet
- 1.interprocess Communication Mechanisms 2.memory Management and Virtual MemoryDocument45 pages1.interprocess Communication Mechanisms 2.memory Management and Virtual MemorySri VardhanNo ratings yet
- Interrupt Handling: Understanding Kernel Contexts and Bottom Half ProcessingDocument26 pagesInterrupt Handling: Understanding Kernel Contexts and Bottom Half ProcessingRajesh ReddyNo ratings yet
- Managing CPU ProcessorsDocument12 pagesManaging CPU ProcessorspermasaNo ratings yet
- Synchronization: Han Wang CS 3410, Spring 2012Document67 pagesSynchronization: Han Wang CS 3410, Spring 2012vlnNo ratings yet
- Read-Copy Update (RCU) in the Linux Kernel: A Scalable Alternative to Read-Write LocksDocument25 pagesRead-Copy Update (RCU) in the Linux Kernel: A Scalable Alternative to Read-Write LocksZafir HafeezNo ratings yet
- 2009 07 11 NCEES AE ComputersDocument56 pages2009 07 11 NCEES AE ComputersHashem Mohamed HashemNo ratings yet
- MasonCC F17 Exploit MitigationDocument148 pagesMasonCC F17 Exploit MitigationLincoln DiasNo ratings yet
- Informations Some Interfaces of Proc Filesystem. Is There Any Other Ways To Get Process Memory Informations Apart From Proc Interfaces?Document10 pagesInformations Some Interfaces of Proc Filesystem. Is There Any Other Ways To Get Process Memory Informations Apart From Proc Interfaces?kumar0% (1)
- Interrupt - IO Part1Document20 pagesInterrupt - IO Part1aesyopNo ratings yet
- 08_architectureDocument51 pages08_architecture21139019No ratings yet
- Performance Optimization Techniques for GPU MemoryDocument77 pagesPerformance Optimization Techniques for GPU MemoryMichael ShiNo ratings yet
- 2003 Wilcox Softirq PDFDocument6 pages2003 Wilcox Softirq PDFhotsync101No ratings yet
- Questions PDFDocument8 pagesQuestions PDFvenkateshNo ratings yet
- Mitigations and Other Real Security Features: Largely Invisible Security ImprovementsDocument29 pagesMitigations and Other Real Security Features: Largely Invisible Security Improvementsluis sotoNo ratings yet
- CS205B - Runlevels, Shells & Single-User Mode CommandsDocument4 pagesCS205B - Runlevels, Shells & Single-User Mode CommandsSer DavisNo ratings yet
- Lecture 2Document31 pagesLecture 2Stefan BoehmerNo ratings yet
- AVR Programming: Interrupts and Timers: Sven Gestegård Robertz Department of Computer Science Lund University SwedenDocument18 pagesAVR Programming: Interrupts and Timers: Sven Gestegård Robertz Department of Computer Science Lund University SwedengcrossnNo ratings yet
- Minimal Arm OsDocument38 pagesMinimal Arm OsAbbas Raza ZaidiNo ratings yet
- Lisa18 Slides MastersDocument127 pagesLisa18 Slides Mastersadrien.blanchetNo ratings yet
- Interrupts and System Calls: Don Porter CSE 506Document50 pagesInterrupts and System Calls: Don Porter CSE 506Mehmet DemirNo ratings yet
- Fast, Simple I/O Concurrency For Ruby Ruby のための、高速・簡単な並行 Io: Rubykaigi2009Document67 pagesFast, Simple I/O Concurrency For Ruby Ruby のための、高速・簡単な並行 Io: Rubykaigi2009oldmoe100% (2)
- Linux Synchronization Mechanisms for Driver DevelopmentDocument16 pagesLinux Synchronization Mechanisms for Driver DevelopmentgopihcNo ratings yet
- Linux Administration - Linux Interview Questions 7Document5 pagesLinux Administration - Linux Interview Questions 7click2chaituNo ratings yet
- GPU Architecture GuideDocument36 pagesGPU Architecture GuideMichael ShiNo ratings yet
- Tut3 ArchitectureDocument62 pagesTut3 ArchitectureJ VNo ratings yet
- CTRL Hijacking2Document36 pagesCTRL Hijacking2Neeraj GargNo ratings yet
- Basic Computer Architecture ReviewDocument19 pagesBasic Computer Architecture ReviewkingNo ratings yet
- Architectural Support For OSDocument13 pagesArchitectural Support For OSHave No IdeaNo ratings yet
- Avr CoreDocument145 pagesAvr CoreStephanie FloresNo ratings yet
- Sajjad-Troubleshooting Storage PerformanceDocument48 pagesSajjad-Troubleshooting Storage Performancesajjad_erNo ratings yet
- OpenMP PresentationDocument51 pagesOpenMP PresentationKarthic SundaramNo ratings yet
- Distributed SystemsDocument238 pagesDistributed SystemsOTMANE ER-RAGRAGUINo ratings yet
- CTMT Chap 07.processor Structure and FunctionDocument38 pagesCTMT Chap 07.processor Structure and FunctionTrần Đình Minh KhoaNo ratings yet
- Verdeyen Laser Electronics SolutionsDocument27 pagesVerdeyen Laser Electronics SolutionsKhalid TeslaNo ratings yet
- Multicore TLP (1Document22 pagesMulticore TLP (1AsHraf G. ElrawEiNo ratings yet
- RTLinuxDocument34 pagesRTLinuxpradnya patilNo ratings yet
- CHAPTER 5 - Computing Components: Professor: Johnnie Baker Computer Science Department Kent State UniversityDocument42 pagesCHAPTER 5 - Computing Components: Professor: Johnnie Baker Computer Science Department Kent State Universitysqamar68No ratings yet
- ARM ArchitectureDocument30 pagesARM ArchitectureKaran Singh 21BEE1163No ratings yet
- Future Processors To Use Coarse-Grain ParallelismDocument48 pagesFuture Processors To Use Coarse-Grain ParallelismArchana RkNo ratings yet
- ARM Exception Slides-RDocument27 pagesARM Exception Slides-RAyushman SharmaNo ratings yet
- Exm Opencl Asian Option Opencl FpgaDocument19 pagesExm Opencl Asian Option Opencl FpgaPaul RogerNo ratings yet
- Lab 12Document17 pagesLab 12Naz MemonNo ratings yet
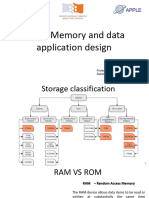
- Lab 2 Memory and data application designDocument22 pagesLab 2 Memory and data application designakkauntdlyaigrichegotoescheNo ratings yet
- 3.OSStructureDocument15 pages3.OSStructuremeyself11No ratings yet
- Arhitecturi de Microcalculatoare: - Von Neuman - CaracteristiciDocument18 pagesArhitecturi de Microcalculatoare: - Von Neuman - CaracteristiciIoan SusneaNo ratings yet
- Lec - 6 InterruptsDocument76 pagesLec - 6 Interruptsjarvis 1011No ratings yet
- Kernel SMP Ban Galore 2003Document18 pagesKernel SMP Ban Galore 2003irc_ro2048No ratings yet
- Openshift Installation Lab: OselabDocument20 pagesOpenshift Installation Lab: OselabAnkushNo ratings yet
- ARM Exception Handling: CS2253 Owen Kaser, UNBSJDocument33 pagesARM Exception Handling: CS2253 Owen Kaser, UNBSJasha_159104875No ratings yet
- Chapter 2 ILPDocument89 pagesChapter 2 ILPSetina AliNo ratings yet
- Lec05 Introduction To Macros and SRAM LintDocument48 pagesLec05 Introduction To Macros and SRAM Lintyanjia8161100No ratings yet
- Volatile VariableDocument16 pagesVolatile Variableapi-3829352No ratings yet
- Linux Insides - Interrupts - Linux Interrupts 1Document4 pagesLinux Insides - Interrupts - Linux Interrupts 1Avinash PalNo ratings yet
- Module 4Document27 pagesModule 4ramyaramanaNo ratings yet
- EcosDocument36 pagesEcosarunmethaNo ratings yet
- And Motivation: PresenterDocument22 pagesAnd Motivation: PresenterKatarina JovanovicNo ratings yet
- AOS-CX Simulator - VRF Part 1 Lab GuideDocument17 pagesAOS-CX Simulator - VRF Part 1 Lab Guiderashmi mNo ratings yet
- DRBD-Cookbook: How to create your own cluster solution, without SAN or NAS!From EverandDRBD-Cookbook: How to create your own cluster solution, without SAN or NAS!No ratings yet
- HW 2 Sol 1Document8 pagesHW 2 Sol 1Chuang JamesNo ratings yet
- Exercise 1 (9 Points) : Information Systems January 14, 2014 Master of Science in Computer EngineeringDocument2 pagesExercise 1 (9 Points) : Information Systems January 14, 2014 Master of Science in Computer EngineeringChuang JamesNo ratings yet
- Functional Dependencies: Cleveland State University CIS 611 - Relational Databases Prepared by Victor MatosDocument59 pagesFunctional Dependencies: Cleveland State University CIS 611 - Relational Databases Prepared by Victor MatosChuang JamesNo ratings yet
- Ext3 Journaling File System: Chadd Williams Shrug 10/05/2001Document21 pagesExt3 Journaling File System: Chadd Williams Shrug 10/05/2001Rahul PatelNo ratings yet
- Red Hat Enterprise Linux-7-High Availability Add-On Overview-En-US 2016Document16 pagesRed Hat Enterprise Linux-7-High Availability Add-On Overview-En-US 2016Chuang JamesNo ratings yet
- Bus Controller For SAB 8086Document11 pagesBus Controller For SAB 8086Chuang JamesNo ratings yet
- Bus Controller For IAPX86 - 88Document5 pagesBus Controller For IAPX86 - 88Chuang JamesNo ratings yet
- Two Sides of Reinventing The Wheel-Aug09Document4 pagesTwo Sides of Reinventing The Wheel-Aug09Chuang JamesNo ratings yet
- Using Bookmarks and Cross-References in Word PDFDocument4 pagesUsing Bookmarks and Cross-References in Word PDFChuang JamesNo ratings yet
- Rethinking The Service Model Scaling Ethernet To A Million Nodes2004 PDFDocument6 pagesRethinking The Service Model Scaling Ethernet To A Million Nodes2004 PDFChuang JamesNo ratings yet
- Red Hat Enterprise Linux-7-High Availability Add-On Administration-En-US 2016Document28 pagesRed Hat Enterprise Linux-7-High Availability Add-On Administration-En-US 2016Chuang JamesNo ratings yet
- Red Hat Enterprise Linux-7-High Availability Add-On Reference-En-US 2016Document118 pagesRed Hat Enterprise Linux-7-High Availability Add-On Reference-En-US 2016Chuang JamesNo ratings yet
- 689 ChiangDocument5 pages689 ChiangChuang JamesNo ratings yet
- Red Hat Enterprise Linux-5-Deployment Guide-en-US PDFDocument915 pagesRed Hat Enterprise Linux-5-Deployment Guide-en-US PDFShrawan KumarNo ratings yet
- Red Hat Enterprise Linux-7-Global File System 2-En-US 2016Document68 pagesRed Hat Enterprise Linux-7-Global File System 2-En-US 2016Chuang JamesNo ratings yet
- Computer ArchitectureDocument101 pagesComputer ArchitectureSoyak_1987No ratings yet
- Red Hat Enterprise Linux 6 Deployment GuideDocument853 pagesRed Hat Enterprise Linux 6 Deployment Guidesrisrinivas76No ratings yet
- Red Hat Enterprise Linux-5-Installation Guide-en-US PDFDocument377 pagesRed Hat Enterprise Linux-5-Installation Guide-en-US PDFUmer Aziz RanaNo ratings yet
- Mastering Cmake PDFDocument448 pagesMastering Cmake PDFJoseph Voss100% (3)
- GnuDocument220 pagesGnupuiuf07No ratings yet
- COmputer ArithmeticDocument9 pagesCOmputer Arithmeticbkvuvce8170No ratings yet
- Pipeline Architecture PDFDocument42 pagesPipeline Architecture PDFChuang James100% (1)
- Unit - 5 Computer OrganizationDocument396 pagesUnit - 5 Computer OrganizationSayeedabu1No ratings yet
- Introduction to Pipelining and HazardsDocument17 pagesIntroduction to Pipelining and HazardsBlítzPrédätørNo ratings yet
- System Analysis and DesignDocument222 pagesSystem Analysis and DesignMnjira AbdallahNo ratings yet
- Tan-Delta and Capacitance Test Set For HT Generator/Motor TestingDocument3 pagesTan-Delta and Capacitance Test Set For HT Generator/Motor Testingmustafa180567% (3)
- Trimble SPS 882 Smart AntennaDocument2 pagesTrimble SPS 882 Smart AntennaMuhammad 'Izza FuadiNo ratings yet
- Datalink, Diagnostic CANDocument17 pagesDatalink, Diagnostic CANPablo Porras100% (1)
- Typical KNX GRMS With IPDocument1 pageTypical KNX GRMS With IPNATHANNo ratings yet
- Office Vocabulay KeyDocument4 pagesOffice Vocabulay KeytinydaisyNo ratings yet
- Lab 6 Mux and DecoderDocument6 pagesLab 6 Mux and DecoderRifah Shanjida MomoNo ratings yet
- Beneheart R12: ElectrocardiographDocument2 pagesBeneheart R12: ElectrocardiographFandi AhmadNo ratings yet
- Oscillator BasicsDocument20 pagesOscillator BasicsRizGust Anunnaki100% (1)
- AM4 Vcore VRM Ratings v1.4 (2019-11-07) - AM4 Vcore VRM Ratings v1.4Document6 pagesAM4 Vcore VRM Ratings v1.4 (2019-11-07) - AM4 Vcore VRM Ratings v1.4dylanNo ratings yet
- Flame-Resistant, High-Temperature Phthalonitrile CompositesDocument1 pageFlame-Resistant, High-Temperature Phthalonitrile CompositesU.S. Naval Research LaboratoryNo ratings yet
- Datasheet Flatpack2 2U IntegratedDocument2 pagesDatasheet Flatpack2 2U IntegratedJohn RobertsNo ratings yet
- Memory Validation List ExternalDocument285 pagesMemory Validation List ExternalEmerson ValdiviesoNo ratings yet
- Stratex XP4 ManualDocument126 pagesStratex XP4 ManualDave Corbett0% (1)
- Soi TechnologyDocument37 pagesSoi Technologysindhu bhargavi100% (2)
- SD / HD Production Switcher: Configuration & Ordering InformationDocument35 pagesSD / HD Production Switcher: Configuration & Ordering Informationjhon hernandezNo ratings yet
- DG-BG4300NU (HW Ver.B2) : 3G/4G USB Modem Compatibility ListDocument3 pagesDG-BG4300NU (HW Ver.B2) : 3G/4G USB Modem Compatibility ListrskcadNo ratings yet
- Wave Shaping and Swiching CircuitsDocument5 pagesWave Shaping and Swiching Circuitskaran007_mNo ratings yet
- Installing Computer Systems and NetworksDocument55 pagesInstalling Computer Systems and NetworksCathy DoodzNo ratings yet
- Instructions and Advices To Use The Electronic Controller Logik 25-SDocument23 pagesInstructions and Advices To Use The Electronic Controller Logik 25-SsebastianNo ratings yet
- Jacobs Improved (2012) PDFDocument9 pagesJacobs Improved (2012) PDFవేలుసామి లింగాసామిNo ratings yet
- Inverter Catalog - MUST 2020 NEWDocument26 pagesInverter Catalog - MUST 2020 NEWsteven6diaz-2No ratings yet
- Panasonic KX-NCS License Compatibility ChartDocument2 pagesPanasonic KX-NCS License Compatibility ChartMilad HaghshenasNo ratings yet
- Midterm DigitalDocument15 pagesMidterm DigitalRie LeNo ratings yet
- PML ION 7500 Power Quality AnalyzersDocument5 pagesPML ION 7500 Power Quality AnalyzersRogerNo ratings yet
- Ims To PSTN Callflow PDFDocument9 pagesIms To PSTN Callflow PDFsolarisanNo ratings yet
- Clear Vision ExamVue 1717WC Wireless DetectorDocument2 pagesClear Vision ExamVue 1717WC Wireless Detectorbobot ortizNo ratings yet
- Circuit Design For An Ion Mobility SpectrometerDocument86 pagesCircuit Design For An Ion Mobility Spectrometer4ndr01d0n3No ratings yet
- Partes Crown AudioDocument78 pagesPartes Crown AudioFlorentino TorresNo ratings yet
- ICT Network Equipment, Voice and Data Cable Labelling StandardDocument7 pagesICT Network Equipment, Voice and Data Cable Labelling StandardtasnimilysNo ratings yet
- Computer Workshop PSBTEDocument21 pagesComputer Workshop PSBTEShubhanshu KumarNo ratings yet