You might also like
- Tecnicas de Operacao 915 CDocument37 pagesTecnicas de Operacao 915 CRonald Alexs Lopez Aguilar100% (2)
- Proposta de teste de avaliação de Matemática A para o 10o anoDocument11 pagesProposta de teste de avaliação de Matemática A para o 10o anoLiliana Silva100% (1)
- Geometria Espacial - Cilindros - Exercicios PDFDocument13 pagesGeometria Espacial - Cilindros - Exercicios PDFLukasVictorNo ratings yet
- Calendario 2021Document9 pagesCalendario 2021lmORphlNo ratings yet
- PortariaDocument10 pagesPortariaPedroNo ratings yet
- Carteira Eleven de Renda Fixa - MaioDocument5 pagesCarteira Eleven de Renda Fixa - MaiolmORphlNo ratings yet
- Edital02 2018 Processo Seletivo Doutorado 2018 2Document5 pagesEdital02 2018 Processo Seletivo Doutorado 2018 2lmORphlNo ratings yet
- Carteira Small Caps - MaioDocument3 pagesCarteira Small Caps - MaiolmORphlNo ratings yet
- Aula 9 Intro ModelagemDocument29 pagesAula 9 Intro ModelagemlmORphlNo ratings yet
- Edital 05 - 2017 Apoio FLUXO - CONTÍNUO - Publicação de Artigos - PGS - EXTRADocument4 pagesEdital 05 - 2017 Apoio FLUXO - CONTÍNUO - Publicação de Artigos - PGS - EXTRAlmORphlNo ratings yet
- Inversa MatrizesDocument3 pagesInversa MatrizeslmORphlNo ratings yet
- Síntese de Redes Lineares de Antenas de Microfita Com Diagramas de Irradiação Conformados para Sistemas de Comunicação 4GDocument120 pagesSíntese de Redes Lineares de Antenas de Microfita Com Diagramas de Irradiação Conformados para Sistemas de Comunicação 4GlmORphlNo ratings yet
- Musical Theory Complete - PT-BRDocument37 pagesMusical Theory Complete - PT-BRHenrique Matulis100% (2)
- Sistemas de coordenadas e operadores vetoriais aplicados em eletromagnetismoDocument51 pagesSistemas de coordenadas e operadores vetoriais aplicados em eletromagnetismolmORphlNo ratings yet
- Dissonâncias rítmica e métrica: uma análise conceitualDocument7 pagesDissonâncias rítmica e métrica: uma análise conceitualEliana Guglielmetti SulpicioNo ratings yet
- 6 Paquimetro Sistema Ingles PDFDocument9 pages6 Paquimetro Sistema Ingles PDFLuciano BroboskiNo ratings yet
- UFRPE prova de Mecânica Geral sobre forças em cordas, placas e centroideDocument2 pagesUFRPE prova de Mecânica Geral sobre forças em cordas, placas e centroideLucas RodolfoNo ratings yet
- DissertaçãoDocument134 pagesDissertaçãofabioriemannNo ratings yet
- Medidas de posição estatísticasDocument17 pagesMedidas de posição estatísticasLucas Henrique AndradeNo ratings yet
- Relatório de FlambagemDocument26 pagesRelatório de FlambagemRaphael Rodrigues MirandaNo ratings yet
- Apostila de Programação de Computadores 1Document441 pagesApostila de Programação de Computadores 1anaccoNo ratings yet
- Funções Polinomiais do 2o Grau: Trajetórias e AplicaçõesDocument28 pagesFunções Polinomiais do 2o Grau: Trajetórias e AplicaçõesPapiro ReceitaNo ratings yet
- Lista de exercícios matemáticosDocument2 pagesLista de exercícios matemáticosSamuel Vilela de LimaNo ratings yet
- Índices de refração de líquidos com refractômetro de AbbeDocument44 pagesÍndices de refração de líquidos com refractômetro de AbbeTomás MahalambeNo ratings yet
- Demografia 8o Ano - Correção Ficha TrabalhoDocument8 pagesDemografia 8o Ano - Correção Ficha TrabalhoSala de EstudoNo ratings yet
- Física: Cinemática e DinâmicaDocument75 pagesFísica: Cinemática e DinâmicaLaerte Rafael SchneiderNo ratings yet
- O realismo em Popper e Peirce: um contraponto filosóficoDocument13 pagesO realismo em Popper e Peirce: um contraponto filosóficoRaquel Rosalia AdamiNo ratings yet
- Trigonometria No Dia A DiaDocument7 pagesTrigonometria No Dia A DiaMarta SofiaNo ratings yet
- Processo de extraçãoDocument54 pagesProcesso de extraçãoHumberto MenaldoNo ratings yet
- Questões Aulão ENEM Mat1Document6 pagesQuestões Aulão ENEM Mat1Virginia PaulinoNo ratings yet
- Eletrização e Princípios da EletrostáticaDocument29 pagesEletrização e Princípios da EletrostáticaEvandroVianaNo ratings yet
- Simulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesDocument3 pagesSimulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesJose Felipe Lopes100% (1)
- 10 1 1 468 539 PDFDocument295 pages10 1 1 468 539 PDFVitor HugoNo ratings yet
- WEG Sca 05 Manual Da Comunicacao Profibus DP 0899.5818 Manual Portugues BRDocument26 pagesWEG Sca 05 Manual Da Comunicacao Profibus DP 0899.5818 Manual Portugues BRginaldo35No ratings yet
- 02 - Apostila - Educação Matemática Na Educação Básica e No Ensino SuperiorDocument79 pages02 - Apostila - Educação Matemática Na Educação Básica e No Ensino SuperiorDimas Matos Silva100% (1)
- Lotomática 2 - Valor PosicionalDocument2 pagesLotomática 2 - Valor PosicionalGeraldo JuniorNo ratings yet
- Movimento em Duas e Três DimensõesDocument41 pagesMovimento em Duas e Três DimensõesAndreas KneipNo ratings yet
- Aplicação de Válvulas Redutoras de Pressão Na Redução de Perdas Reais em Redes de Distribuição de Água Na Unidade de Neócio Leste - SabespDocument93 pagesAplicação de Válvulas Redutoras de Pressão Na Redução de Perdas Reais em Redes de Distribuição de Água Na Unidade de Neócio Leste - SabespRafael HoraNo ratings yet
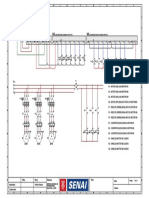
- Esquema elétrico de um sistema de controle de motoresDocument1 pageEsquema elétrico de um sistema de controle de motoresLuiz Carlos AguilellaNo ratings yet
- Questões Física II ADocument2 pagesQuestões Física II AErikikoNo ratings yet
- Teste de Hipóteses sobre Médias PopulacionaisDocument2 pagesTeste de Hipóteses sobre Médias Populacionais011294feNo ratings yet