You might also like
- Botadores HidraulicosDocument7 pagesBotadores HidraulicosNicolás SantarelliNo ratings yet
- Distribucion Variable PDFDocument37 pagesDistribucion Variable PDFAlberto Abarca100% (1)
- Servicio de Mantenimiento Preventivo y Correctivo Al Monoblock y Cabeza de Un Motor AutomotrizDocument12 pagesServicio de Mantenimiento Preventivo y Correctivo Al Monoblock y Cabeza de Un Motor AutomotrizOrlando Gonzalez0% (1)
- Funcionamiento de BUZOS HIDRÁULICOS Parte 1Document11 pagesFuncionamiento de BUZOS HIDRÁULICOS Parte 1River Man SegNo ratings yet
- Embragues CentrifugosDocument22 pagesEmbragues CentrifugosPablo SanchezNo ratings yet
- Circuito CánisterDocument7 pagesCircuito CánisterMariela Belén100% (1)
- Avances y Retrasos de VálvulasDocument3 pagesAvances y Retrasos de VálvulasKarmy Pop100% (2)
- Misfire FinalDocument9 pagesMisfire FinalRichard Guaman Paucar0% (1)
- Motor de ArranqueDocument9 pagesMotor de ArranquePaulo Cesar Ramirez VerdugoNo ratings yet
- Tipos de Bombas de LubricacionDocument6 pagesTipos de Bombas de LubricacionBrayan Ayasta SánchezNo ratings yet
- Geometria de La DireccionDocument4 pagesGeometria de La Direccionoskar83% (6)
- Diagnostico de VacioDocument4 pagesDiagnostico de VacioLorenzo BuitronNo ratings yet
- Funcionamiento Del Termostato Del MotorDocument4 pagesFuncionamiento Del Termostato Del MotorJhosteing Morales0% (1)
- Transmision Manual PDFDocument211 pagesTransmision Manual PDFNerio MoralesNo ratings yet
- Diagnóstico del sistema de inyección de combustibleDocument27 pagesDiagnóstico del sistema de inyección de combustibleJean carlos78% (9)
- Manual Cambio Correa DistribucionDocument26 pagesManual Cambio Correa Distribucionchamizillo85100% (1)
- Bombas de TransferenciaDocument23 pagesBombas de TransferenciaJulio Barraza Baza100% (1)
- Unidad de Engranajes PlanetariosDocument36 pagesUnidad de Engranajes PlanetariosFelix Junior Vilchez CastilloNo ratings yet
- Puesta A Punto de Un Motor de 4 TiemposDocument6 pagesPuesta A Punto de Un Motor de 4 TiemposEdgar Beltran100% (1)
- Embrague de AnulacionDocument4 pagesEmbrague de Anulaciondarwin100% (1)
- Solucion de Problemas en El Sistema de FrenosDocument2 pagesSolucion de Problemas en El Sistema de FrenosLeonardo PizarroNo ratings yet
- Comprobación de fugas por cilindro: diagnóstico y soluciónDocument3 pagesComprobación de fugas por cilindro: diagnóstico y soluciónGonzalo Ojeda100% (1)
- Tipos de CulataDocument4 pagesTipos de CulataJuan Manuel Challco QuinonesNo ratings yet
- Sistema EncendidoDocument15 pagesSistema EncendidoCatherine MeloNo ratings yet
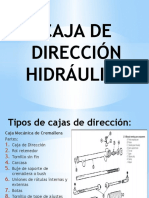
- Caja de Dirección HidráulicaDocument10 pagesCaja de Dirección HidráulicaEdgar Jhonatan Escobedo Martinez67% (3)
- Instrumentos de Puesta A PuntoDocument26 pagesInstrumentos de Puesta A PuntoLuis100% (1)
- Desmontaje - Montaje - Suspension TraseraDocument22 pagesDesmontaje - Montaje - Suspension Traseraapi-3806781100% (2)
- Sistemas de Inyección Electrónica Diesel: CRIDocument34 pagesSistemas de Inyección Electrónica Diesel: CRIDe La Cruz CarlosNo ratings yet
- MonoblockDocument64 pagesMonoblockAlonzo Zelada Roa0% (3)
- Sistema de Inyeccion MultipuntoDocument16 pagesSistema de Inyeccion MultipuntocarpathosswNo ratings yet
- Sistema de Encendido OignicionDocument90 pagesSistema de Encendido OignicionMarco Lopez100% (1)
- Fallas Bon - VeDocument19 pagesFallas Bon - VeJose David Huanca Taype100% (2)
- Aceite CVTDocument1 pageAceite CVTAlexis DavidNo ratings yet
- Sistema CVVT HyundaiDocument41 pagesSistema CVVT HyundaiEfraín Jesús Márquez Flores100% (3)
- Tipos de transmisión manual y sus componentesDocument56 pagesTipos de transmisión manual y sus componentesBenjamin Lòpez Gutierrez67% (3)
- Introducción Caja de Cambios AutomáticasDocument8 pagesIntroducción Caja de Cambios AutomáticasSebastian Ayala GilNo ratings yet
- Direccion Mecánica Por Bolas RecirculantesDocument14 pagesDireccion Mecánica Por Bolas RecirculantesGermanMollesaca100% (1)
- Armada y Desarmado de Un MotorDocument5 pagesArmada y Desarmado de Un MotorManuel Estuardo Morales67% (6)
- Presentacion Arbol de LevasDocument35 pagesPresentacion Arbol de LevasJosias Bravo100% (2)
- Calibracion y Puesta A Punto GNC Llerena SebastianDocument13 pagesCalibracion y Puesta A Punto GNC Llerena SebastianXavier HidalgoNo ratings yet
- Verificacion Sistema de Lubricacion, EnfriamientoDocument34 pagesVerificacion Sistema de Lubricacion, EnfriamientoKellie Cooper60% (5)
- Unidad de Engranajes Planetarios atDocument19 pagesUnidad de Engranajes Planetarios atBrayan LopezNo ratings yet
- Sistema - Dirección Hidraulica PDFDocument11 pagesSistema - Dirección Hidraulica PDFOrielNo ratings yet
- Presentación Transmisiones HidráulicasDocument46 pagesPresentación Transmisiones HidráulicasCesar Gomez100% (1)
- Motor de Arranque CoaxialDocument13 pagesMotor de Arranque CoaxialIvan Benavides Mendez100% (1)
- Comprobacion Bloque Motor y Tren Alternativo PDFDocument17 pagesComprobacion Bloque Motor y Tren Alternativo PDFcreafff100% (1)
- Guía para El Ajuste y Calibración de Válvulas - Ajuste de Valvulas, Calibración de Valvulas, Buzos HidraulicosDocument21 pagesGuía para El Ajuste y Calibración de Válvulas - Ajuste de Valvulas, Calibración de Valvulas, Buzos Hidraulicosornitorrinco3375% (4)
- Bujías de PrecalentamientoDocument7 pagesBujías de PrecalentamientoRichard RawlingsNo ratings yet
- Dinamometro AutomotrizDocument10 pagesDinamometro AutomotrizCarlos Rengifo QuezadaNo ratings yet
- Válvula Reguladora de PresiónTISALEMADocument3 pagesVálvula Reguladora de PresiónTISALEMADavid TisalemaNo ratings yet
- Sistema de lubricación del motor: funciones y componentesDocument25 pagesSistema de lubricación del motor: funciones y componentesYuliethsita PulidoNo ratings yet
- Presentacion Common RailDocument33 pagesPresentacion Common RailAnonymous ijpgot8fNo ratings yet
- Partes y Elementos Principales de Un Motor OttoDocument11 pagesPartes y Elementos Principales de Un Motor OttoMiguel100% (1)
- Foro Temático Reparacion de Motores MedicionesDocument5 pagesForo Temático Reparacion de Motores MedicionesRafael GoñasNo ratings yet
- Partes de Un MotorDocument21 pagesPartes de Un MotorLizbeth CondeNo ratings yet
- Manual Mecanica Automotriz Diferencias Motores Gasolina DieselDocument14 pagesManual Mecanica Automotriz Diferencias Motores Gasolina DieselJ Zito JefferxitoNo ratings yet
- Guia AutomotorDocument62 pagesGuia AutomotorNorberto LopezNo ratings yet
- Partes Principales de Un Motor DieselDocument10 pagesPartes Principales de Un Motor DieselPatricio Espinoza ArancibiaNo ratings yet
- Taques Mecanicos e HidraulicosDocument3 pagesTaques Mecanicos e HidraulicosJavier Toromoreno Galvez100% (1)
- Presentación MOTOR OTTODocument88 pagesPresentación MOTOR OTTOmejiafajardoNo ratings yet
- Atirantados Bolivia 2012 1Document98 pagesAtirantados Bolivia 2012 1Juan Daniel Rojas Palma0% (1)
- Esfuerzo Cortante en La Industria AlimentariaDocument18 pagesEsfuerzo Cortante en La Industria AlimentariatifanikiNo ratings yet
- Sustentacion Final TesisDocument63 pagesSustentacion Final TesisMarlio CardonaNo ratings yet
- SulfatosDocument29 pagesSulfatosVictor Alejandro Huertas Prieto100% (1)
- Contenido HidrologiaDocument4 pagesContenido HidrologiaRafael Alexander Ceiba RNo ratings yet
- Guia - Gestion Esterilizacion OsakidetzaDocument133 pagesGuia - Gestion Esterilizacion OsakidetzaGerardo Herrera Latorre100% (1)
- Cuerpos Geometricos - ContinuacionDocument5 pagesCuerpos Geometricos - Continuaciongodoykatherine065No ratings yet
- Procesamiento MercurioDocument5 pagesProcesamiento MercurioasdrumelNo ratings yet
- Ejercicios Mate II PUCPDocument4 pagesEjercicios Mate II PUCPedgarNo ratings yet
- Determinación de masas relativas de granos comunesDocument8 pagesDeterminación de masas relativas de granos comunesAnaNo ratings yet
- 025 - Cambio de Liners Chute de Pantalon - Planta Pebbles - Rev2Document17 pages025 - Cambio de Liners Chute de Pantalon - Planta Pebbles - Rev2CIROMANOLO100% (1)
- Levantamiento TopográficoDocument32 pagesLevantamiento TopográficoMacx Velasquez CoaquiraNo ratings yet
- Procedimiento de Alivio de TensionesDocument13 pagesProcedimiento de Alivio de TensionesAnonymous wuvXb0iNo ratings yet
- Corriente eléctrica: concepto y ley de CoulombDocument19 pagesCorriente eléctrica: concepto y ley de CoulombjeinerNo ratings yet
- Bases Del Diseño Vial - Principios y Metas BasicasDocument30 pagesBases Del Diseño Vial - Principios y Metas BasicasRuben AlarconNo ratings yet
- Silabo de Matemáticas para La Ingeniería I. Ing. AgroindustrialDocument12 pagesSilabo de Matemáticas para La Ingeniería I. Ing. AgroindustrialJuan Eloy BonillaNo ratings yet
- Informe Sobre Mecánica CuánticaDocument9 pagesInforme Sobre Mecánica CuánticaJohn AriasNo ratings yet
- Elementos de ContornoDocument108 pagesElementos de ContornoMatías MartínezNo ratings yet
- Grupos Encuentro RogersDocument7 pagesGrupos Encuentro Rogerseduardo islas garciaNo ratings yet
- Prueba 4to Basico La Materia 2019Document4 pagesPrueba 4to Basico La Materia 2019Javiera Dellafiori LealNo ratings yet
- Por qué se hace investigación en matemáticaDocument5 pagesPor qué se hace investigación en matemáticaRoger ErnestoNo ratings yet
- Guia de Ejercitacion de Cinematic ADocument7 pagesGuia de Ejercitacion de Cinematic Aantonella_reineroNo ratings yet
- Universidad Autónoma de Santo DomingoDocument24 pagesUniversidad Autónoma de Santo DomingoEdimil MercedesNo ratings yet
- 5 - I - Prolog 31 - 08Document31 pages5 - I - Prolog 31 - 08Antonella Davila SandovalNo ratings yet
- Manual de Herramientas Del Ho'OponoponoDocument19 pagesManual de Herramientas Del Ho'OponoponoIvana Lombardia100% (1)
- Abre puertas de garaje lm711MDDocument4 pagesAbre puertas de garaje lm711MDPolo RickyNo ratings yet
- Musica y MatematicasDocument35 pagesMusica y MatematicasHumberto Castro Sotil100% (1)
- Examen 3BDocument3 pagesExamen 3BPepe PertíñezNo ratings yet
- Osciladores AcopladosDocument7 pagesOsciladores AcopladosYendry Alexandra BlancoNo ratings yet
- Porosidad 1Document22 pagesPorosidad 1Karola PreciosisimaNo ratings yet