You might also like
- Exam2 (Sample With Solutions)Document5 pagesExam2 (Sample With Solutions)Richard BondNo ratings yet
- Ldcs Material 2Document14 pagesLdcs Material 2Mangaiyarkarasi VengatachalamNo ratings yet
- Ldcs MaterialDocument14 pagesLdcs MaterialMangaiyarkarasi VengatachalamNo ratings yet
- PLC Solution BookDocument49 pagesPLC Solution BookJagadeesh Rajamanickam71% (14)
- Chapter 1: PIC16F887 Microcontroller - Device OverviewDocument17 pagesChapter 1: PIC16F887 Microcontroller - Device OverviewMakhloufi HocineNo ratings yet
- PIC16F887 Microcontroller OverviewDocument12 pagesPIC16F887 Microcontroller OverviewCataNo ratings yet
- Chapter 11Document21 pagesChapter 11Khalid MasoodNo ratings yet
- Lab 3 - Interrupts, low power and watchdog timerDocument13 pagesLab 3 - Interrupts, low power and watchdog timerAmna EhtshamNo ratings yet
- Laboratory3 Marking SchemeDocument13 pagesLaboratory3 Marking SchemeAmna EhtshamNo ratings yet
- Co Unit2 Part1Document11 pagesCo Unit2 Part1Manjushree N.SNo ratings yet
- Srmist Department of It 15It314J-Principles of Operating Systems Cycle Test-1 Answer Key Part - BDocument8 pagesSrmist Department of It 15It314J-Principles of Operating Systems Cycle Test-1 Answer Key Part - BPandiaraj RajNo ratings yet
- Unit 4 16marksDocument12 pagesUnit 4 16markssramalingam288953No ratings yet
- Time-Controlled Interrupts With The S7-22xDocument2 pagesTime-Controlled Interrupts With The S7-22xwww.otomasyonegitimi.comNo ratings yet
- PLC QuestionsDocument17 pagesPLC QuestionsbahyNo ratings yet
- What Are The Various PLC System in SIMATIC S7 Range ?Document10 pagesWhat Are The Various PLC System in SIMATIC S7 Range ?Qamar Hassan IqbalNo ratings yet
- CREATING TIME DELAYS AND DATA TRANSFER BETWEEN CONTROLLERSDocument7 pagesCREATING TIME DELAYS AND DATA TRANSFER BETWEEN CONTROLLERSPrerna Sanjivan MhatreNo ratings yet
- Computer Organization and Architecture Cs2253: Part-ADocument21 pagesComputer Organization and Architecture Cs2253: Part-AjanukarthiNo ratings yet
- Tutorial On Simatic s5 Control System :practical Programming and Fault FindingDocument22 pagesTutorial On Simatic s5 Control System :practical Programming and Fault Findingak4dili80% (5)
- Embedded C Timer Interrupt 8051Document12 pagesEmbedded C Timer Interrupt 8051Sivaranjan Goswami100% (2)
- Adv. MicrocontrollerDocument12 pagesAdv. Microcontrollermd mamnunNo ratings yet
- Share ProcesssssssDocument42 pagesShare ProcesssssssMuskan JainNo ratings yet
- Interrupt Structure of 8051Document16 pagesInterrupt Structure of 8051Amar SinghNo ratings yet
- AutomationDocument31 pagesAutomationJerry JosephNo ratings yet
- Module 2Document37 pagesModule 2Amruta KhangaonkarNo ratings yet
- Programmable Logic Controller BasicsDocument28 pagesProgrammable Logic Controller BasicsMOHAMMED RAHEELNo ratings yet
- Volume6 2003 PDFDocument31 pagesVolume6 2003 PDFZeljkoSipcicNo ratings yet
- PLC Programming Basics: Memory Organization, Program Scan Cycle & Types of ProgrammingDocument41 pagesPLC Programming Basics: Memory Organization, Program Scan Cycle & Types of ProgrammingNaga RajanNo ratings yet
- B010-PLC Basics: Programmable Logic Controllers ExplainedDocument10 pagesB010-PLC Basics: Programmable Logic Controllers ExplainedPratab VijayanNo ratings yet
- Mechatronics UNIT4&5Document45 pagesMechatronics UNIT4&5saba78% (18)
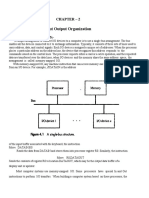
- Input Output Organization: Chapter - 2Document22 pagesInput Output Organization: Chapter - 2Rahul JainNo ratings yet
- MCU LAB GUIDEDocument26 pagesMCU LAB GUIDEssmtejani2No ratings yet
- Sequential control labDocument3 pagesSequential control labعسم ساماNo ratings yet
- Introduction To PLCDocument14 pagesIntroduction To PLCMeowwwewNo ratings yet
- Unit-2 Case Study Embedded System For Automatic Washing MachineDocument11 pagesUnit-2 Case Study Embedded System For Automatic Washing Machinesujith84% (19)
- (2019-CPE-28) MP Assignment 2Document14 pages(2019-CPE-28) MP Assignment 2Nitasha HumaNo ratings yet
- IPC Lab 9Document12 pagesIPC Lab 9abdullah1996No ratings yet
- 8 MPLAB ICD & PIC 16F877 Tutorial: CY CY OSC OSCDocument9 pages8 MPLAB ICD & PIC 16F877 Tutorial: CY CY OSC OSCrobotbusterNo ratings yet
- Practical Work 4 Salleh AbasDocument10 pagesPractical Work 4 Salleh AbasMuhd Syazmi F1050No ratings yet
- End Sem ExamDocument20 pagesEnd Sem Examdorejis472No ratings yet
- GSM Home SecurityDocument52 pagesGSM Home SecurityCheedella Subbarao100% (1)
- DEMO9S08QG8 - APP Example Application User GuideDocument4 pagesDEMO9S08QG8 - APP Example Application User GuideEDERTREVISANNo ratings yet
- Raewwwwwwwwwwwwwwwwwwwwwwwww: RUNG - A Section of The PLC Ladder Program That Terminates in An OutputDocument6 pagesRaewwwwwwwwwwwwwwwwwwwwwwwww: RUNG - A Section of The PLC Ladder Program That Terminates in An Outputpatil_555No ratings yet
- Lect 20 EtDocument10 pagesLect 20 EtmadhavNo ratings yet
- Interrupt system and pipelining in 8086Document16 pagesInterrupt system and pipelining in 8086Haalim MNo ratings yet
- Programming The Application: First With Siemens: Organizing The Program in S7Document41 pagesProgramming The Application: First With Siemens: Organizing The Program in S7George GNo ratings yet
- PLC Full ReportDocument10 pagesPLC Full ReportJian Jie0% (1)
- RISC Instruction Set:: I) Data Manipulation InstructionsDocument8 pagesRISC Instruction Set:: I) Data Manipulation InstructionsSwarup BharNo ratings yet
- Introduction To Programmable Logic Controllers: What Is PLC?Document16 pagesIntroduction To Programmable Logic Controllers: What Is PLC?Ann RazonNo ratings yet
- Laboratory3 ECIDocument12 pagesLaboratory3 ECIfa20-bce-046No ratings yet
- PLC 1703025724Document14 pagesPLC 1703025724Yeyen RoyhanNo ratings yet
- 9 Interrupt Structures PDFDocument0 pages9 Interrupt Structures PDFMH BerNo ratings yet
- Unit IVCAO NotesDocument67 pagesUnit IVCAO NotesAshish PalandurkarNo ratings yet
- Timers & Interrupts in PIC 16F84: Timer ModuleDocument5 pagesTimers & Interrupts in PIC 16F84: Timer ModuleSanjiv KumarNo ratings yet
- 17EC3652 Lab ManualDocument50 pages17EC3652 Lab ManualMmk ReddyNo ratings yet
- Electrical Engineering Department Academic Session: Oktober 2020Document9 pagesElectrical Engineering Department Academic Session: Oktober 2020Hazrin HelmiNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingFrom EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingRating: 4 out of 5 stars4/5 (1)
- Irregular VerbsDocument8 pagesIrregular VerbsSzabadszállási EditNo ratings yet
- Spelling PluralsDocument2 pagesSpelling PluralssumathisumiNo ratings yet
- Spelling PluralsDocument2 pagesSpelling PluralssumathisumiNo ratings yet
- A Gentle Introduction To Blockchain Technology Web PDFDocument18 pagesA Gentle Introduction To Blockchain Technology Web PDFFirozNo ratings yet
- Midtermexam PLC 2015 0Document3 pagesMidtermexam PLC 2015 0ahmedNo ratings yet
- Format For IotDocument40 pagesFormat For Iothanovar raviNo ratings yet
- Nordic Thingy 53 Data SheetDocument2 pagesNordic Thingy 53 Data SheetTerence Jhon TabonNo ratings yet
- Translate - Google SDocument1 pageTranslate - Google SJoan VeranoNo ratings yet
- Blibli Merchant API Documentation v-3.6.0 PDFDocument92 pagesBlibli Merchant API Documentation v-3.6.0 PDFKanto TerrorNo ratings yet
- CTC 3D Printer ManualDocument38 pagesCTC 3D Printer ManualNimmala Ganesh100% (1)
- MHW-N1964 Designing Healthcare Applications With NXPDocument111 pagesMHW-N1964 Designing Healthcare Applications With NXPfrhuttonNo ratings yet
- Question Paper For JTO Phase-I Data Communication: Fill in The Blanks/ Short Answer questions/True/False TypeDocument3 pagesQuestion Paper For JTO Phase-I Data Communication: Fill in The Blanks/ Short Answer questions/True/False Typerockingprad6066No ratings yet
- KST GripperSpotTech 31 en PDFDocument53 pagesKST GripperSpotTech 31 en PDFfaspNo ratings yet
- Appendix ADocument72 pagesAppendix AFelipe DiasNo ratings yet
- BPM Analysis TechniquesDocument6 pagesBPM Analysis Techniquesjustinbui85No ratings yet
- Ios Notes For ProfessionalsDocument893 pagesIos Notes For ProfessionalsVignesh Vicky100% (1)
- Reusable Firmware Development A Practical Approach To APIs, HALs and Drivers (PDFDrive)Document321 pagesReusable Firmware Development A Practical Approach To APIs, HALs and Drivers (PDFDrive)Adithya RajagopalanNo ratings yet
- cs8079 Human Computer Interaction MCQDocument13 pagescs8079 Human Computer Interaction MCQAbhishek A. NadgireNo ratings yet
- SecurityCenter 4.8 User Guide PDFDocument160 pagesSecurityCenter 4.8 User Guide PDFabbuvitsNo ratings yet
- Cloud-1 42 Subjects PDFDocument8 pagesCloud-1 42 Subjects PDFHarlianNo ratings yet
- Questions For Late Bloomers:: CBSE Ques. No. Chapter / Topic Marks Distribution of Marks Question WiseDocument12 pagesQuestions For Late Bloomers:: CBSE Ques. No. Chapter / Topic Marks Distribution of Marks Question WiseanshNo ratings yet
- SoD Risk Matrix by DTI 2.0 1Document3 pagesSoD Risk Matrix by DTI 2.0 1Moises Mojica CastañedaNo ratings yet
- Project Title: Replace Crude Oil Samplers - Yanbu North TerminalDocument1 pageProject Title: Replace Crude Oil Samplers - Yanbu North TerminalMuhammad SalmanNo ratings yet
- LPADocument16 pagesLPABhaskar AmbikapathyNo ratings yet
- TM-3532 AVEVA Diagrams (14.1) Diagrams - PID Designer Rev 2.0Document208 pagesTM-3532 AVEVA Diagrams (14.1) Diagrams - PID Designer Rev 2.0Adeniran Joshua100% (1)
- Offline Assessment For Exchange ServerDocument2 pagesOffline Assessment For Exchange ServerHieu PhamNo ratings yet
- The 10th TSSA Program Book v1.0 Final Version PDFDocument19 pagesThe 10th TSSA Program Book v1.0 Final Version PDFAyu Rosyida zainNo ratings yet
- SACS UtilitiesDocument45 pagesSACS UtilitiesUmar KidaNo ratings yet
- Dynamic Fields in WebUI Using GET - A Method (No PDFDocument6 pagesDynamic Fields in WebUI Using GET - A Method (No PDFsumanthcrmNo ratings yet
- Lab#1Document16 pagesLab#1Imran KhanNo ratings yet
- DBMS Theory QuestionDocument26 pagesDBMS Theory Questiondieos leousisNo ratings yet
- Corel DrawDocument23 pagesCorel DrawananthakrishnanNo ratings yet
- HD44780 LCD Datasheet ExplainedDocument1 pageHD44780 LCD Datasheet ExplainedAnkit Daftery100% (4)
- Novell Groupwise: Troubleshooting: 2 Solutions To Common ProblemsDocument107 pagesNovell Groupwise: Troubleshooting: 2 Solutions To Common ProblemsEnriquePhoenixNo ratings yet
- Java File Dialog BoxDocument4 pagesJava File Dialog BoxMargerie FrueldaNo ratings yet