You might also like
- Analisis Matricial PDFDocument115 pagesAnalisis Matricial PDFWladimir Diego Curasma100% (2)
- 100Mod-MDR - Resortes - 2da ParteDocument30 pages100Mod-MDR - Resortes - 2da ParteGerald Medina SandovalNo ratings yet
- Obtenga ecuaciones diferenciales modelo mecánico 2 masas-muelles-amortiguadoresDocument10 pagesObtenga ecuaciones diferenciales modelo mecánico 2 masas-muelles-amortiguadoresandres becerraNo ratings yet
- Capítulo 5 Series InfinitasDocument26 pagesCapítulo 5 Series InfinitasLUIS DANIEL TORRES ANAYANo ratings yet
- IdE TP 3Document2 pagesIdE TP 3HoracioNo ratings yet
- Sumatorias y sucesiones recursivasDocument3 pagesSumatorias y sucesiones recursivasYeisson MesaNo ratings yet
- Momento3 Jhonf Algebra-1Document11 pagesMomento3 Jhonf Algebra-1Larry Bryan WilsonNo ratings yet
- CapacitoresDocument7 pagesCapacitoresMaria Alejandra Colon OsorioNo ratings yet
- PD-04 (D) Prueba de Desarrolo 4 Fisica 1Document2 pagesPD-04 (D) Prueba de Desarrolo 4 Fisica 1JHORDAN GASPAR ATAUCUSINo ratings yet
- Introducción a la integral definidaDocument13 pagesIntroducción a la integral definidaJulioNo ratings yet
- Taller 1 PDFDocument1 pageTaller 1 PDFMarttin HernandezNo ratings yet
- Practica ResueltaDocument22 pagesPractica ResueltaAlexander ChapaNo ratings yet
- Ej Electro p1 PDFDocument38 pagesEj Electro p1 PDFDILAND ONOFRE CASTRO CASTRONo ratings yet
- Método Derigidez Con Apoyos Elásticos.Document33 pagesMétodo Derigidez Con Apoyos Elásticos.Jeanpier DancourtNo ratings yet
- Matemática 3 - Forma de JordanDocument12 pagesMatemática 3 - Forma de JordanDiego MammatusNo ratings yet
- Ecuaciones de la hipérbola y sus propiedades geométricasDocument21 pagesEcuaciones de la hipérbola y sus propiedades geométricasvictor100% (1)
- Parcial SismoDocument13 pagesParcial SismoSmit RodriguezNo ratings yet
- Fuerzas electrostáticas y campo eléctrico entre cargas puntualesDocument4 pagesFuerzas electrostáticas y campo eléctrico entre cargas puntualesJhonatan Rojas HornaNo ratings yet
- Mecanica Cuantica Cohen Complemento NIIIDocument8 pagesMecanica Cuantica Cohen Complemento NIIIAnonymous IGyCbLNo ratings yet
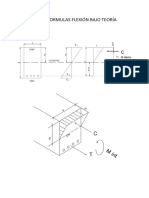
- Deducción Formulas Flexion Teoría ElásticaDocument6 pagesDeducción Formulas Flexion Teoría ElásticaKenny Pabón CevallosNo ratings yet
- Deducción Formulas Flexion Teoría ElásticaDocument6 pagesDeducción Formulas Flexion Teoría Elásticaflor samaniegoNo ratings yet
- Solución de Ejercicios de Las Guías de ElectromagnetismoDocument118 pagesSolución de Ejercicios de Las Guías de ElectromagnetismoCamie Utsushimi50% (2)
- Teorema Del RestoDocument18 pagesTeorema Del RestoNina Yujra RamiroNo ratings yet
- PDF Encuentre La Constante de Resorte Torsional Equivalente Del Sistema Que Se Muestra en La Figura 1docx CompressDocument4 pagesPDF Encuentre La Constante de Resorte Torsional Equivalente Del Sistema Que Se Muestra en La Figura 1docx CompressAviles Martínez Juan antonioNo ratings yet
- Tarea T-2.2 - Sistemas Analogos Gpo. A ResueltaDocument7 pagesTarea T-2.2 - Sistemas Analogos Gpo. A ResueltaHans GomezNo ratings yet
- 3 Algebra Primeras Clases I 2022Document16 pages3 Algebra Primeras Clases I 2022ALVARO APAZA CHOQUENo ratings yet
- Electrodinámica Tarea 1 SolucionesDocument14 pagesElectrodinámica Tarea 1 SolucionesSergio Urzua GajardoNo ratings yet
- Ej Electro p1 PDFDocument38 pagesEj Electro p1 PDFJayceemikel100% (1)
- Capitulo 2 Modifcado FinalDocument59 pagesCapitulo 2 Modifcado FinalOribe SalinasNo ratings yet
- Problemas de Razones y ProporcionesDocument2 pagesProblemas de Razones y ProporcionesHumberto CyyNo ratings yet
- Respuesta dinámica de edificios simples al movimiento de la baseDocument23 pagesRespuesta dinámica de edificios simples al movimiento de la baseDC AltlvNo ratings yet
- Serie1 Cálculo Integral-2023Document2 pagesSerie1 Cálculo Integral-2023Ana DalayNo ratings yet
- Apoyos ElásticosDocument50 pagesApoyos ElásticosRonald VerasteguiNo ratings yet
- SistEcuacLinePlanDocument2 pagesSistEcuacLinePlanalexiaclcNo ratings yet
- Estadistica Descriptiva y Probabilidades-559Document1 pageEstadistica Descriptiva y Probabilidades-559hernan ccorimanya sopantaNo ratings yet
- 1 - Difusión Con Reacción QuímicaDocument10 pages1 - Difusión Con Reacción QuímicaDaniel Santillan RuizNo ratings yet
- Solucionario 453Document2 pagesSolucionario 453sgpizarro100% (1)
- Estructura 2PDocument6 pagesEstructura 2PGalvin Michael Roldan CaicedoNo ratings yet
- vA/C_sistema_cuerdasDocument10 pagesvA/C_sistema_cuerdasheider duarteNo ratings yet
- 8 - Viga Sobre Fundacion ElasticaDocument17 pages8 - Viga Sobre Fundacion ElasticaAnonymous Ffi8DR67% (3)
- Olguín Carranza - Diana Laura - M12S1AI1Document9 pagesOlguín Carranza - Diana Laura - M12S1AI1luna pereNo ratings yet
- Actividades 3Document14 pagesActividades 3Dara Elizabeth Sotomayor Vargas50% (2)
- Parcial ResistenciaDocument15 pagesParcial ResistenciaomarNo ratings yet
- CAP. 20 ELECTROSTATICA - Física NovaDocument12 pagesCAP. 20 ELECTROSTATICA - Física Novaraul_icpNo ratings yet
- Semana 5 - Diferencias Finitas - InterpolacionDocument14 pagesSemana 5 - Diferencias Finitas - InterpolacionKevin GuilletNo ratings yet
- Ejercicios Analisis para 5 PuntosDocument10 pagesEjercicios Analisis para 5 PuntosPercy Daniel Ramos Champa100% (1)
- CruzCastillo Francisco M12S2AI3Document6 pagesCruzCastillo Francisco M12S2AI3BlackCapp Brazy CrossNo ratings yet
- La Electricidad Del GloboDocument6 pagesLa Electricidad Del GloboPeter GarciaNo ratings yet
- Devanado Imbricado y Devanado OnduladoDocument5 pagesDevanado Imbricado y Devanado OnduladoItzel Virginia Rivas SosaNo ratings yet
- PD4 Mef2 2020-1Document2 pagesPD4 Mef2 2020-1ABCAndresNo ratings yet
- Ejercicios Resuelstos Transformada InversaDocument9 pagesEjercicios Resuelstos Transformada InversaMEKArotNo ratings yet
- Vibracion Mecanica Tarea 1 - Parcial 1Document2 pagesVibracion Mecanica Tarea 1 - Parcial 1KHALIL ABISAID NAHON VELASQUEZNo ratings yet
- Resolucion Portico MathcadDocument2 pagesResolucion Portico MathcadMarkito QuindeNo ratings yet
- Mètodo de Esfuerzos Admisibles (Seccion Transformada)Document19 pagesMètodo de Esfuerzos Admisibles (Seccion Transformada)MARLENE ROJAS MEDINANo ratings yet
- Edificio Simple Al Movimiento de La BaseDocument4 pagesEdificio Simple Al Movimiento de La BaseSusAn Vale LopezNo ratings yet
- La ecuación general de segundo grado en dos y tres variablesFrom EverandLa ecuación general de segundo grado en dos y tres variablesNo ratings yet
- Trabajo InformaticaDocument21 pagesTrabajo InformaticarodrigoNo ratings yet
- Manual de Administracion de Negocios PDFDocument118 pagesManual de Administracion de Negocios PDFElizabeth Roque Ramos100% (2)
- Formto fpr4Document6 pagesFormto fpr4rodrigoNo ratings yet
- Tarea SenatiDocument4 pagesTarea SenatirodrigoNo ratings yet
- Past PerfectDocument19 pagesPast PerfectrodrigoNo ratings yet
- EquipoDocument1 pageEquiporodrigoNo ratings yet
- Foro Codigo de EticaDocument2 pagesForo Codigo de EticarodrigoNo ratings yet
- GEOMETRÍA Y DISEÑO DE VIGA DE CONCRETO ARMADODocument9 pagesGEOMETRÍA Y DISEÑO DE VIGA DE CONCRETO ARMADOLuis Gonzalez RamosNo ratings yet
- Poemas 01Document18 pagesPoemas 01lopezvictoryNo ratings yet
- Estadistica Tarea 2Document2 pagesEstadistica Tarea 2rodrigoNo ratings yet
- Ingles Tu CasaDocument1 pageIngles Tu CasarodrigoNo ratings yet
- Invierte Pe PDFDocument13 pagesInvierte Pe PDFEber Cconislla ChacmanaNo ratings yet
- DownloadDocument6 pagesDownloadrodrigoNo ratings yet
- P31 005Document198 pagesP31 005SusanLuceroSanchezArdilesNo ratings yet
- Caidas Verticales e InclinadasDocument19 pagesCaidas Verticales e InclinadasMarco Antonio Delgado Sepulveda100% (3)
- Sesion N°5Document10 pagesSesion N°5rodrigoNo ratings yet
- Sesion #10 PDFDocument3 pagesSesion #10 PDFrodrigoNo ratings yet
- Octubre Del 2012: Municipalidad Distrital de Simon BolivarDocument50 pagesOctubre Del 2012: Municipalidad Distrital de Simon BolivardavisNo ratings yet
- Pistas y VeredasDocument153 pagesPistas y VeredasrodrigoNo ratings yet
- PERFIL de Pistas y VeredasDocument73 pagesPERFIL de Pistas y VeredasHeidy Jackeline Barbaran Espinoza100% (3)
- DownloadDocument7 pagesDownloadrodrigoNo ratings yet
- Octubre Del 2012: Municipalidad Distrital de Simon BolivarDocument50 pagesOctubre Del 2012: Municipalidad Distrital de Simon BolivardavisNo ratings yet
- Caídas VerticalesDocument7 pagesCaídas VerticalesPam ESNo ratings yet
- Octubre Del 2012: Municipalidad Distrital de Simon BolivarDocument50 pagesOctubre Del 2012: Municipalidad Distrital de Simon BolivardavisNo ratings yet
- FierroDocument1 pageFierrorodrigoNo ratings yet
- DownloadDocument7 pagesDownloadrodrigoNo ratings yet
- Cantidad 111Document1 pageCantidad 111rodrigoNo ratings yet
- 09 - Ensayo de Compresion SimpleDocument6 pages09 - Ensayo de Compresion SimpleEduardo Olivares TrinidadNo ratings yet
- Informe 2Document3 pagesInforme 2Andrés Urbina100% (1)
- Psicomotricidad en la educación infantil: estimulando el desarrollo integral de los niñosDocument3 pagesPsicomotricidad en la educación infantil: estimulando el desarrollo integral de los niñosEmî SiuvaNo ratings yet
- TEST-4 Prevencion Riesgos Laborales y Otros OPE 2017 (21!07!2017)Document7 pagesTEST-4 Prevencion Riesgos Laborales y Otros OPE 2017 (21!07!2017)Kristina Arenas Macias100% (1)
- Factores Del MacroentornoDocument18 pagesFactores Del MacroentornoPercy Cardenas OchoaNo ratings yet
- 1 - Org y Adm 1 TEORIADocument71 pages1 - Org y Adm 1 TEORIAmarcela aresNo ratings yet
- Nexus 2018 EspañolDocument14 pagesNexus 2018 Españolivanelmasterrible100% (1)
- Galton y La EugenesiaDocument0 pagesGalton y La EugenesiaJesús CosamalónNo ratings yet
- EscalaResilienciaDocument4 pagesEscalaResilienciarolando100% (1)
- Qué es Síntesis, Metáfora y RefranesDocument1 pageQué es Síntesis, Metáfora y RefranesJosue PerezNo ratings yet
- Psicología y currículo: claves para un diseño efectivoDocument6 pagesPsicología y currículo: claves para un diseño efectivoGloria Tarrío VillaverdeNo ratings yet
- Manual de Puentes PDFDocument717 pagesManual de Puentes PDFEmene Monja GarciaNo ratings yet
- Ejercicio en Clase ResoluciónDocument2 pagesEjercicio en Clase ResoluciónEmpresa GamiNo ratings yet
- 05 Buscando Una HuacaDocument11 pages05 Buscando Una HuacaGabriel De La Cruz PradoNo ratings yet
- Rubrica para Valorar Mapa MentalDocument2 pagesRubrica para Valorar Mapa MentalIng Siste CompNo ratings yet
- Planificación de pozos horizontalesDocument32 pagesPlanificación de pozos horizontalesBrandon Parada100% (1)
- Evaluación de diagnóstico de Ciencias SocialesDocument7 pagesEvaluación de diagnóstico de Ciencias Socialesdave stanley iguasnia palominoNo ratings yet
- Propiedades de Los LogaritmosDocument4 pagesPropiedades de Los LogaritmosRobinson Chopra Chopra0% (1)
- Reporte 4. RecortadoresDocument7 pagesReporte 4. RecortadoresCésar Francisco Hurtado MongeNo ratings yet
- Anova y Pruebas Duncan y TukeyDocument14 pagesAnova y Pruebas Duncan y TukeyGustavo Quispe CoaquiraNo ratings yet
- Transferencia de Calor en Estado InestableDocument4 pagesTransferencia de Calor en Estado InestableLucy Varas Rojas100% (2)
- 02 - Identificacion de Oportunidades de NegocioDocument12 pages02 - Identificacion de Oportunidades de Negocioerick.delcastillo100% (1)
- Historia Desconocida de Los Hombres-Robert Charroux PDFDocument346 pagesHistoria Desconocida de Los Hombres-Robert Charroux PDFjhony9664% (11)
- Caso Práctico Comportamiento OrganizativoDocument10 pagesCaso Práctico Comportamiento OrganizativoLeon_Mabuni100% (1)
- TaponexDocument36 pagesTaponexJaime AnzaNo ratings yet
- Levantamiento TopograficoDocument6 pagesLevantamiento Topograficoromel carazas morrielNo ratings yet
- Liderazgo LateralDocument2 pagesLiderazgo LateralReclutamiento EfectivoNo ratings yet
- Resumen - R. H. Hilton (1988) "Introducción"Document3 pagesResumen - R. H. Hilton (1988) "Introducción"ReySalmonNo ratings yet
- El Reloj Estratégico de Bowman (I)Document2 pagesEl Reloj Estratégico de Bowman (I)contacto100% (1)
- Plan de MateDocument1 pagePlan de MateEdison PinchaoNo ratings yet
- IntroducciónDocument51 pagesIntroducciónAdrián Sosa NuezNo ratings yet