You might also like
- Unidad 2 Ecuaciones ParametricasDocument27 pagesUnidad 2 Ecuaciones ParametricasAlberto Zepeda100% (1)
- SEcuaciones No LinealesDocument59 pagesSEcuaciones No LinealesHector Mamani CutipaNo ratings yet
- FuncionesDocument75 pagesFuncionesLuis Miguel Cobos De La HozNo ratings yet
- EJERCICIO 4 y 5 (Letra C)Document5 pagesEJERCICIO 4 y 5 (Letra C)Sebastian FotografiaNo ratings yet
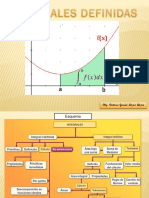
- Calculo Integral DefinidaDocument22 pagesCalculo Integral DefinidaNialitoNo ratings yet
- Primer Parcial Matematicas EspecialesDocument12 pagesPrimer Parcial Matematicas EspecialesAlejandra RomeroNo ratings yet
- Actividad en Equipo 4.1Document11 pagesActividad en Equipo 4.1Diana VillegasNo ratings yet
- Rmawgen en EsDocument73 pagesRmawgen en EsGary JancoNo ratings yet
- Reporte Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenDocument25 pagesReporte Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenfredirevNo ratings yet
- Tema 5.1Document13 pagesTema 5.1Edgar Antonio Rocha SolísNo ratings yet
- Curvas Dar ZarroukDocument4 pagesCurvas Dar Zarroukvelkus2013No ratings yet
- Exposicion Mate DerivadaaaaaaDocument17 pagesExposicion Mate DerivadaaaaaaKeiko Atoche CoronelNo ratings yet
- Metodo SimplexDocument20 pagesMetodo SimplexZulma Itzel Caballero PoolNo ratings yet
- Deflexion de Una Viga Aplicacion de EcuaDocument14 pagesDeflexion de Una Viga Aplicacion de EcuaCristhian Rivero MarrufoNo ratings yet
- Modulo Matematica 2023 Con Respuestas 28 NovDocument12 pagesModulo Matematica 2023 Con Respuestas 28 NovIvan Sersing100% (1)
- Investigación-Correa CarrascoDocument12 pagesInvestigación-Correa CarrascoJEFFERSON DENILSON CORREA CARRASCONo ratings yet
- Métodos Numéricos - Propagación ErroresDocument4 pagesMétodos Numéricos - Propagación ErroresLuis SantiagoNo ratings yet
- 19 - 2020-02 - CII-ING - Integrales Dobles Sobre RectángulosDocument16 pages19 - 2020-02 - CII-ING - Integrales Dobles Sobre RectángulosKryspo Salsa FrescaNo ratings yet
- Calculo Vectorial IV y VDocument21 pagesCalculo Vectorial IV y VBrian BriceñoNo ratings yet
- El Método Del Simplex Fue Creado en 1947 Por El Matemático George DantzigDocument8 pagesEl Método Del Simplex Fue Creado en 1947 Por El Matemático George Dantzigsamira103No ratings yet
- Resumen de Algebra IDocument11 pagesResumen de Algebra IEmiliano Randolfo SeguraNo ratings yet
- Evaluacion Final - Modelos de Toma de Decisiones - (Document8 pagesEvaluacion Final - Modelos de Toma de Decisiones - (Oscar ColmenaresNo ratings yet
- Trabajo Practico N°6-5toañoDocument2 pagesTrabajo Practico N°6-5toañoFaga FleitaNo ratings yet
- Tecnologia 17 000477Document11 pagesTecnologia 17 000477MaricieloHuaracaNo ratings yet
- Clase 8A. Aplicacion Regla de Cramer - Solución Sistema de Ecuaciones Lineales1Document24 pagesClase 8A. Aplicacion Regla de Cramer - Solución Sistema de Ecuaciones Lineales1Karen GrajalesNo ratings yet
- Medidas de PosiciónDocument21 pagesMedidas de PosiciónRuth Aurelia Quispe AguilarNo ratings yet
- Investigación de La Unidad 3. Proceso de Ortonormalización de Gram-SchmidtDocument4 pagesInvestigación de La Unidad 3. Proceso de Ortonormalización de Gram-SchmidtLAYLA MARRUFO PEREZNo ratings yet
- Conjetura de PoincaréDocument4 pagesConjetura de PoincaréLuisNo ratings yet
- Examen de Destrezas de CálculoDocument3 pagesExamen de Destrezas de CálculoJosé RNo ratings yet
- Guia Rotaciones 1 MedioDocument2 pagesGuia Rotaciones 1 MedioDami Canales GonzalezNo ratings yet