You might also like
- Power Systems Electromagnetic Transients Simulation (Malestrom) PDFDocument449 pagesPower Systems Electromagnetic Transients Simulation (Malestrom) PDFmohsinaman100% (1)
- Design Criteria For Low Distortion in Feedback Opamp Circuits (Bjørnar Hernes)Document101 pagesDesign Criteria For Low Distortion in Feedback Opamp Circuits (Bjørnar Hernes)hajianamirNo ratings yet
- Apache UnleashedDocument656 pagesApache UnleashedhajianamirNo ratings yet
- Medium Voltage Technical Guide: Basics For MV Cubicle DesignDocument84 pagesMedium Voltage Technical Guide: Basics For MV Cubicle DesignVasu Devan100% (3)
- Tutorial Understanding NFPA 70EDocument1 pageTutorial Understanding NFPA 70EhajianamirNo ratings yet
- NFPA 70E Standard For Electrical Safety in The WorkplaceDocument771 pagesNFPA 70E Standard For Electrical Safety in The Workplacehajianamir100% (1)
- The Manual of Free Energy Devices and Systems (1991)Document128 pagesThe Manual of Free Energy Devices and Systems (1991)kury93% (183)
- Schneider Medium Voltage Equipment Design GuideDocument491 pagesSchneider Medium Voltage Equipment Design GuidehajianamirNo ratings yet
- Power Electronics Handbook RASHIDDocument522 pagesPower Electronics Handbook RASHIDhajianamirNo ratings yet
- Schneider Electric Cahier Technique 151Document24 pagesSchneider Electric Cahier Technique 151Anonymous BwLfvuNo ratings yet
- NFPA 70E-2009 Standard For Electrical Safety in The WorkplaceDocument125 pagesNFPA 70E-2009 Standard For Electrical Safety in The WorkplacehajianamirNo ratings yet
- Tutorial Understanding NFPA 70EDocument1 pageTutorial Understanding NFPA 70EhajianamirNo ratings yet
- Waveguide HandbookDocument217 pagesWaveguide HandbookmangyanNo ratings yet
- Industrial Color Testing (2nd Edition)Document388 pagesIndustrial Color Testing (2nd Edition)api-19731065No ratings yet
- Electric Motor Test RepairDocument160 pagesElectric Motor Test Repairrotorbrent100% (2)
- Electrical Installation Technical ManualDocument165 pagesElectrical Installation Technical ManualhajianamirNo ratings yet
- Chemical Process Safety 3rd Ed. - R. Sanders (2005) WWDocument187 pagesChemical Process Safety 3rd Ed. - R. Sanders (2005) WWhajianamirNo ratings yet
- Chemical Process Safety 3rd Ed. - R. Sanders (2005) WWDocument187 pagesChemical Process Safety 3rd Ed. - R. Sanders (2005) WWhajianamirNo ratings yet
- Electrical Installation Designs - 2nd EditionDocument223 pagesElectrical Installation Designs - 2nd EditionRad Briones LibrandaNo ratings yet
- Design Criteria For Low Distortion in Feedback Opamp Circuits (Bjørnar Hernes)Document101 pagesDesign Criteria For Low Distortion in Feedback Opamp Circuits (Bjørnar Hernes)hajianamirNo ratings yet
- Electric Motor Test RepairDocument160 pagesElectric Motor Test Repairrotorbrent100% (2)
- Electrical Installation Designs, 2nd EditionDocument223 pagesElectrical Installation Designs, 2nd Editionhajianamir100% (1)
- Electrical Installation Technical ManualDocument165 pagesElectrical Installation Technical ManualhajianamirNo ratings yet
- Tutorial Understanding NFPA 70EDocument1 pageTutorial Understanding NFPA 70EhajianamirNo ratings yet
- Design Criteria For Low Distortion in Feedback Opamp Circuits (Bjørnar Hernes)Document101 pagesDesign Criteria For Low Distortion in Feedback Opamp Circuits (Bjørnar Hernes)hajianamirNo ratings yet
- Chemical Process Safety 3rd Ed. - R. Sanders (2005) WWDocument187 pagesChemical Process Safety 3rd Ed. - R. Sanders (2005) WWhajianamirNo ratings yet
- Tutorial Understanding NFPA 70EDocument1 pageTutorial Understanding NFPA 70EhajianamirNo ratings yet
- The Manual of Free Energy Devices and Systems (1991)Document128 pagesThe Manual of Free Energy Devices and Systems (1991)kury93% (183)
- Tutorial Understanding NFPA 70EDocument1 pageTutorial Understanding NFPA 70EhajianamirNo ratings yet
- Electric Motor Test RepairDocument160 pagesElectric Motor Test Repairrotorbrent100% (2)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Stationary Concrete Pumps en G 16345-0 PDFDocument20 pagesStationary Concrete Pumps en G 16345-0 PDFLUIS ISAAC LEON PARONo ratings yet
- CV Enric Durany enDocument2 pagesCV Enric Durany enenricduranyNo ratings yet
- SportOptics 2014-2015Document31 pagesSportOptics 2014-2015ivaldeztNo ratings yet
- BTS Training Fiber Optic Advanced SplicingDocument5 pagesBTS Training Fiber Optic Advanced Splicingjama99No ratings yet
- GRI 20RS-12-B Data SheetDocument6 pagesGRI 20RS-12-B Data SheetJMAC SupplyNo ratings yet
- DEA R ScriptsDocument3 pagesDEA R ScriptsFrancisco SilvaNo ratings yet
- Nichrome60 Wire Data SheetDocument2 pagesNichrome60 Wire Data SheetvvingtsabtaNo ratings yet
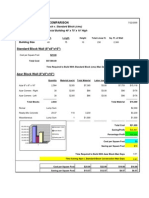
- AZAR Block CostcomparisonDocument8 pagesAZAR Block CostcomparisontckittuNo ratings yet
- 1986 Lobel RobinsonDocument18 pages1986 Lobel RobinsonNathallia SalvadorNo ratings yet
- Sad Thesis Guidelines FinalsDocument13 pagesSad Thesis Guidelines FinalsJes RamosNo ratings yet
- Que Dice Ese Gesto Descargar GratisDocument2 pagesQue Dice Ese Gesto Descargar GratisjavierNo ratings yet
- Determining The Redundancy FactorDocument6 pagesDetermining The Redundancy FactorEdris Salehi GolsefidiNo ratings yet
- Design of A Fluidized Drum GranulatorDocument6 pagesDesign of A Fluidized Drum GranulatorditchcheNo ratings yet
- Dewatering SystemDocument124 pagesDewatering SystemSpyros NannosNo ratings yet
- Solar TrackerDocument13 pagesSolar TrackerMuthuRajNo ratings yet
- Pipeline Tow MethodDocument25 pagesPipeline Tow MethodctrlaltdestroyNo ratings yet
- 50TJDocument56 pages50TJHansen Henry D'souza100% (2)
- How Do We Classify An Antipumping Relay?: What Will Happen If Antipumping Relay Circuit Is Not Present?Document6 pagesHow Do We Classify An Antipumping Relay?: What Will Happen If Antipumping Relay Circuit Is Not Present?joseNo ratings yet
- Supercharging: Superchargers & TurbochargersDocument11 pagesSupercharging: Superchargers & TurbochargersAkhil Here100% (1)
- 5TH Week EnergyDocument6 pages5TH Week EnergyMira VeranoNo ratings yet
- Odv-065r18ejj-G DS 2-0-3Document1 pageOdv-065r18ejj-G DS 2-0-3Евгений Переверзев0% (1)
- SteelKote EP ZN HS: High-Build Zinc-Rich Epoxy PrimerDocument3 pagesSteelKote EP ZN HS: High-Build Zinc-Rich Epoxy Primerprasanth cp100% (1)
- 01-01 Boltec S - SafetyDocument30 pages01-01 Boltec S - SafetyALVARO ANTONIO SILVA DELGADONo ratings yet
- Cassette toilet spare parts guide for models C2, C3 and C4Document21 pagesCassette toilet spare parts guide for models C2, C3 and C4georgedragosNo ratings yet
- 3 Phase Induction Motors Objective Questions With AnswersDocument3 pages3 Phase Induction Motors Objective Questions With AnswersMohan Raj0% (2)
- Bottom Ash HopperDocument8 pagesBottom Ash HopperBhargav ChaudhariNo ratings yet
- Power and Simplicity: Pace ScientificDocument16 pagesPower and Simplicity: Pace ScientificAnonymous mNQq7ojNo ratings yet
- Ford Essex V6 EngineDocument8 pagesFord Essex V6 EngineJoakamaster 16No ratings yet