You might also like
- Chapter 2 2d TransformationDocument21 pagesChapter 2 2d TransformationManpreet KaurNo ratings yet
- CH 2 طائراتDocument30 pagesCH 2 طائراتmohammed.yassen987No ratings yet
- Chapter Four 4. TransformationsDocument14 pagesChapter Four 4. TransformationsmazengiyaNo ratings yet
- L4-I Computer GraphicsDocument19 pagesL4-I Computer GraphicsروابيNo ratings yet
- Shape Matching: Similarity Measures and AlgorithmsDocument10 pagesShape Matching: Similarity Measures and AlgorithmsMiguel Angel Segura TimoteoNo ratings yet
- COMPUTER GRAPHICS TRANSFORMATIONDocument14 pagesCOMPUTER GRAPHICS TRANSFORMATIONsdfNo ratings yet
- BLOCK 2 Computer Graphics IgnouDocument87 pagesBLOCK 2 Computer Graphics IgnouDanielle PerryNo ratings yet
- Unit 2 Cad Notes MtechDocument27 pagesUnit 2 Cad Notes MtechGnana ShekarNo ratings yet
- CG 3Document10 pagesCG 3sefefe hunegnawNo ratings yet
- Chapter Five GraphicsDocument37 pagesChapter Five GraphicswalelegneNo ratings yet
- Unit IiiDocument27 pagesUnit IiiLee CangNo ratings yet
- 2D Transformation PDFDocument11 pages2D Transformation PDFbassam lateefNo ratings yet
- MIT Computational Geometry Problem Set 2 on Spline CurvesDocument3 pagesMIT Computational Geometry Problem Set 2 on Spline Curvesbaoke renNo ratings yet
- Cga Unit 2Document106 pagesCga Unit 2kiran sankarNo ratings yet
- (X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheDocument4 pages(X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheAshima ChopraNo ratings yet
- Assignment-1 (230201024)Document7 pagesAssignment-1 (230201024)fmdatazoneNo ratings yet
- L4 - II Computer GraphicsDocument21 pagesL4 - II Computer GraphicsروابيNo ratings yet
- LarLinAlg8 LecturePPTs 06 01Document29 pagesLarLinAlg8 LecturePPTs 06 01AguilaNo ratings yet
- CG Chapter 5Document15 pagesCG Chapter 5rajmaisuria111No ratings yet
- Chapter 3Document51 pagesChapter 3Teze TadeNo ratings yet
- Computer Graphics Using Open GL, 3 Edition F. S. Hill, Jr. and S. KelleyDocument49 pagesComputer Graphics Using Open GL, 3 Edition F. S. Hill, Jr. and S. KelleyAbrahamNo ratings yet
- 2D TransformationDocument38 pages2D TransformationSarvodhya Bahri0% (1)
- Similarity TransformationsDocument20 pagesSimilarity TransformationsTushar PanditNo ratings yet
- CGR U3T2 3 Presentation10Document18 pagesCGR U3T2 3 Presentation10Kaiwalya MatreNo ratings yet
- Transformations Matrix IntroductionDocument8 pagesTransformations Matrix IntroductionHarsh ShuklaNo ratings yet
- Transformations - Practice Problems For CADDocument6 pagesTransformations - Practice Problems For CADbinduNo ratings yet
- 2D Conformal Transformation-Rev1Document43 pages2D Conformal Transformation-Rev1Nurafiqah HumairaNo ratings yet
- Computer Graphics and Animation - 09 TransformationsDocument35 pagesComputer Graphics and Animation - 09 TransformationsmisteryfollowNo ratings yet
- 01 TransformationsDocument16 pages01 TransformationsAnonymous 9q5GEfm8INo ratings yet
- Chapter 5 Transformations of The Euclidean PlaneDocument14 pagesChapter 5 Transformations of The Euclidean PlaneLitoy ArquizaNo ratings yet
- CG SolutionDocument3 pagesCG Solutionlibranhitesh7889No ratings yet
- CG QnaDocument13 pagesCG QnaabcNo ratings yet
- Presentation of Linear Algebra by MinaDocument12 pagesPresentation of Linear Algebra by MinaMinahil UmarNo ratings yet
- Basic Transformations:: TranslationDocument8 pagesBasic Transformations:: TranslationprincejiNo ratings yet
- Computer Numerical Control: TransformationsDocument56 pagesComputer Numerical Control: TransformationsibraheemNo ratings yet
- Lec4 PDFDocument91 pagesLec4 PDFArun ShalNo ratings yet
- Chapter 3 Scan ConversionDocument24 pagesChapter 3 Scan ConversionHimanshu GautamNo ratings yet
- 2D & 3D Geometric Transformations ExplainedDocument123 pages2D & 3D Geometric Transformations Explainedkhalil alhatabNo ratings yet
- CG Chapter 5Document61 pagesCG Chapter 5kiramelaku1No ratings yet
- Transformation in Computer GraphicsDocument10 pagesTransformation in Computer Graphicssakthiek3No ratings yet
- CG Exp5 C28Document24 pagesCG Exp5 C28Prathmesh GaikwadNo ratings yet
- Geometric Transformations: 2D and 3DDocument44 pagesGeometric Transformations: 2D and 3DJihan HasanNo ratings yet
- Graphing Higher-Order ProceduresDocument9 pagesGraphing Higher-Order ProceduresGurparkash Singh SohiNo ratings yet
- Computer Graphics: Geometric Objects and TransformationsDocument71 pagesComputer Graphics: Geometric Objects and TransformationsArulNo ratings yet
- Vehicle Dynamics CH 2 & 3Document96 pagesVehicle Dynamics CH 2 & 3Ashley MoreiraNo ratings yet
- 2 D TransformationDocument43 pages2 D TransformationNilesh RanaNo ratings yet
- Vector Valued FunctionDocument15 pagesVector Valued FunctionEncik ComotNo ratings yet
- Vector LessonsDocument36 pagesVector LessonsMarc RiveraNo ratings yet
- Curves: Lecture Notes of Computer Graphics Prepared by DR - Eng. Ziyad Tariq Al-Ta'iDocument14 pagesCurves: Lecture Notes of Computer Graphics Prepared by DR - Eng. Ziyad Tariq Al-Ta'iDhahair A AbdullahNo ratings yet
- Matrix in Computer GraphicsDocument17 pagesMatrix in Computer GraphicsG Vinay KumarNo ratings yet
- Microlink Introduction to Coordinate TransformationsDocument14 pagesMicrolink Introduction to Coordinate Transformationsnaod abrehamNo ratings yet
- Linear Algebra and Image Processing: Additional Theory in 40 CharactersDocument8 pagesLinear Algebra and Image Processing: Additional Theory in 40 CharactersSoma SundarNo ratings yet
- Chapter 2 Theory IMPDocument39 pagesChapter 2 Theory IMPankush ghoshNo ratings yet
- 053 Block 2 PDFDocument87 pages053 Block 2 PDFAnkush PandayNo ratings yet
- 22CDC12 AnswersDocument14 pages22CDC12 AnswersJEEVAANANTH KNo ratings yet
- Lecture 1 - Intro To Vector AnalysisDocument20 pagesLecture 1 - Intro To Vector AnalysisJ KimNo ratings yet
- ENGM541 Lab7Document9 pagesENGM541 Lab7moooo yii trrhjNo ratings yet
- Application For Freshers: Infosys LimitedDocument2 pagesApplication For Freshers: Infosys LimitedShubham TyagiNo ratings yet
- Consumer Buying Behaviour MBADocument115 pagesConsumer Buying Behaviour MBAmail_ankitkr40% (5)
- School of Mechanical Engineering Laboratory ManualDocument19 pagesSchool of Mechanical Engineering Laboratory ManualShubham TyagiNo ratings yet
- INTRODUCTION 2 Cad CamDocument12 pagesINTRODUCTION 2 Cad CamPrashant MeshramNo ratings yet
- Coca ColaDocument15 pagesCoca ColaShubham TyagiNo ratings yet
- Summer Internship Presentation On "Comparative Study Between Coke and Pepsi"Document9 pagesSummer Internship Presentation On "Comparative Study Between Coke and Pepsi"Shubham TyagiNo ratings yet
- Data AnalysisDocument20 pagesData AnalysisShubham TyagiNo ratings yet
- Internship ReportDocument99 pagesInternship ReportShubham TyagiNo ratings yet
- Coca ColaDocument15 pagesCoca ColaShubham TyagiNo ratings yet
- Data AnalysisDocument20 pagesData AnalysisShubham TyagiNo ratings yet
- Grigori Yakovlevich Perelman's Parents Are Yakov Perelman, An Electrical EngineerDocument7 pagesGrigori Yakovlevich Perelman's Parents Are Yakov Perelman, An Electrical EngineerMihai PopNo ratings yet
- Latihan CalculusDocument26 pagesLatihan CalculusMuhammad RayhanNo ratings yet
- Find Angle Measures Using Triangle TheoremsDocument2 pagesFind Angle Measures Using Triangle TheoremsSolomon FloresNo ratings yet
- Problems and Solutions 2 1Document21 pagesProblems and Solutions 2 1nikuukinNo ratings yet
- Investigating Parallel and Perpendicular Lines - LauraDocument2 pagesInvestigating Parallel and Perpendicular Lines - Lauraapi-457322801No ratings yet
- CBSE Solved Sample Papers For Class 6 For MathsDocument10 pagesCBSE Solved Sample Papers For Class 6 For MathsyoganaNo ratings yet
- Math 2nd Puc Imp QuestionsDocument11 pagesMath 2nd Puc Imp QuestionsNoo EntryNo ratings yet
- VCE Y11 General Maths OutlineDocument19 pagesVCE Y11 General Maths OutlineZhiyong HuangNo ratings yet
- C103-Linear Algebra PDFDocument2 pagesC103-Linear Algebra PDFSandeep SivNo ratings yet
- It Is Given That The Line: y Ax BXC DX Xe A B D eDocument5 pagesIt Is Given That The Line: y Ax BXC DX Xe A B D eChan RicNo ratings yet
- Constructions: Sample Question 1Document4 pagesConstructions: Sample Question 1Ayush JaiswalNo ratings yet
- General Physics 1 VECTORDocument57 pagesGeneral Physics 1 VECTORPortia Egken100% (1)
- Solids Volume Formulas GuideDocument4 pagesSolids Volume Formulas GuideGil John Awisen0% (1)
- IMO Sample Papers Class 4 Sample PaperDocument2 pagesIMO Sample Papers Class 4 Sample PaperPra Mou100% (3)
- 2IV60 Computer Graphics Graphics Primitives and Attributes: Jack Van Wijk TU/eDocument45 pages2IV60 Computer Graphics Graphics Primitives and Attributes: Jack Van Wijk TU/eKunjan MehtaNo ratings yet
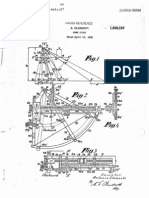
- Clementi Bombsight US1968127Document4 pagesClementi Bombsight US1968127Dreamk990No ratings yet
- 2 LociDocument22 pages2 LociMohamed MohyeldinNo ratings yet
- Sci - MG - Maths General - Science & Math - 4chanDocument10 pagesSci - MG - Maths General - Science & Math - 4chanGeorge AryanitiNo ratings yet
- MAT 211, Spring 2012 Solutions To Homework Assignment 9Document5 pagesMAT 211, Spring 2012 Solutions To Homework Assignment 9okeNo ratings yet
- Unit-16 Sequences and Series of FunctionsDocument18 pagesUnit-16 Sequences and Series of FunctionsChandradeep Reddy TeegalaNo ratings yet
- Tarea Limites Infinitos y Al InfinitoDocument4 pagesTarea Limites Infinitos y Al InfinitoKryztyan ARNo ratings yet
- PRE CALCULUS 2ndQ SLMDocument45 pagesPRE CALCULUS 2ndQ SLMWilmar RonioNo ratings yet
- Geometry Ancient Kemet YesDocument29 pagesGeometry Ancient Kemet YesJonahJuniorNo ratings yet
- Maths CH 092Document110 pagesMaths CH 092muscularindianNo ratings yet
- 4 ESO Academics - UNIT 08 - VECTORS AND LINES.Document18 pages4 ESO Academics - UNIT 08 - VECTORS AND LINES.Goheim100% (1)
- MAT099 Past Years QuestionDocument4 pagesMAT099 Past Years QuestionSyarifah Anis AqilaNo ratings yet
- Dr. Roman U. Sexl, Dr. Helmuth K. Urbantke Auth. Relativity, Groups, Particles Special Relativity and Relativistic Symmetry in Field and Particle PhysicsDocument399 pagesDr. Roman U. Sexl, Dr. Helmuth K. Urbantke Auth. Relativity, Groups, Particles Special Relativity and Relativistic Symmetry in Field and Particle Physicsabbey100% (1)
- Principles of 2D PDFDocument96 pagesPrinciples of 2D PDFJerome GeeNo ratings yet