You might also like
- Navegación de Robot Móvil Usando Kinect, Opencv Y ArduinoDocument8 pagesNavegación de Robot Móvil Usando Kinect, Opencv Y ArduinoAlbertoGonzálezNo ratings yet
- Aplicacion Sensor Kinect MedicinaDocument6 pagesAplicacion Sensor Kinect MedicinaLuisNo ratings yet
- Proyecto Tangible 2008Document24 pagesProyecto Tangible 2008JuanNo ratings yet
- Minibot SDocument7 pagesMinibot Slisbeth escalonaNo ratings yet
- Processing: Desarrollo de interfaces de usuario, aplicaciones de visión artificial e IoT para Arduino y ESP8266From EverandProcessing: Desarrollo de interfaces de usuario, aplicaciones de visión artificial e IoT para Arduino y ESP8266Rating: 5 out of 5 stars5/5 (1)
- Reporte Servicio FinalDocument19 pagesReporte Servicio FinalJorge GarciaNo ratings yet
- Proyecto KinectDocument4 pagesProyecto KinectWilson Aldana SotomonteNo ratings yet
- Trabajo Iot - GadgetsDocument37 pagesTrabajo Iot - GadgetsQUIROZ LOPEZ OSCAR ESTEBANNo ratings yet
- Puzzlebot ReporteDocument12 pagesPuzzlebot ReporteAnatanael Jesús Miranda FaustinoNo ratings yet
- Práctica 4 Robótica IndustrialDocument7 pagesPráctica 4 Robótica Industrial4IV05 MOCTEZUMA GUERRERO JOSHUA (luxLwatch)No ratings yet
- PRACTICA#2 Contador de Objetos y Monedas Por Visión - MEC 8-2Document8 pagesPRACTICA#2 Contador de Objetos y Monedas Por Visión - MEC 8-2alberto.am0104No ratings yet
- Diseño e implementación de un brazo robótico ajedrecista autónomo con visión e inteligencia artificialDocument5 pagesDiseño e implementación de un brazo robótico ajedrecista autónomo con visión e inteligencia artificialfirts twoNo ratings yet
- Informe FinalDocument13 pagesInforme FinalDANILO JESUS GUTIERREZ JACOMENo ratings yet
- Reporte Final de SVA.Document14 pagesReporte Final de SVA.Juan Manuel Robles chavezNo ratings yet
- Laboratorio 1 de Sistemas OperativosDocument18 pagesLaboratorio 1 de Sistemas Operativosmaricielo avalos chinoNo ratings yet
- Manual Kinect FinalDocument50 pagesManual Kinect FinalPablo PalominoNo ratings yet
- Dispositivos TradicionalesDocument3 pagesDispositivos TradicionalesMario CruzNo ratings yet
- Mecatrónica Del GestoDocument7 pagesMecatrónica Del GestoLino García MoralesNo ratings yet
- 3_S3Document26 pages3_S3enrique ziulNo ratings yet
- Dispensador de Semilla CompletoDocument11 pagesDispensador de Semilla CompletoDaniel SalazarNo ratings yet
- Redes AéreasDocument5 pagesRedes AéreasAlberto LedezmaNo ratings yet
- Informe de RoboticaDocument11 pagesInforme de RoboticaBayron EduardoNo ratings yet
- Parking Digital Centro Comercial ChipichapeDocument20 pagesParking Digital Centro Comercial ChipichapeXimena ArboledaNo ratings yet
- Factores Humanos en La Realidad Virtual y Aumentada, y Tecnologías de VisualizaciónDocument34 pagesFactores Humanos en La Realidad Virtual y Aumentada, y Tecnologías de VisualizaciónLuis NinaNo ratings yet
- Anteproyecto V2Document8 pagesAnteproyecto V2Gustavo Alejandro RivasNo ratings yet
- Integracion Con Vision Artificial Orb 120Document99 pagesIntegracion Con Vision Artificial Orb 120Alay camilo lopezNo ratings yet
- AnteproyectoDocument17 pagesAnteproyectoThom Ero SenninNo ratings yet
- Vision ArtificialDocument9 pagesVision ArtificialErik VRNo ratings yet
- Informe Final TFG - Denis MontoyaDocument12 pagesInforme Final TFG - Denis MontoyaAgung AnomNo ratings yet
- Actividad 2Document8 pagesActividad 21123123123No ratings yet
- Trabajo IntroduccionDocument13 pagesTrabajo Introduccioncristian890527No ratings yet
- Informe Proyecto Integrador 2020Document8 pagesInforme Proyecto Integrador 2020Diego RoaNo ratings yet
- Nuevas Interfaces y Sus AplicacionesDocument8 pagesNuevas Interfaces y Sus Aplicacioneshasler licapaNo ratings yet
- Tarea My Open LabDocument3 pagesTarea My Open LabKarinaNo ratings yet
- Kinect 2Document18 pagesKinect 2Eddy Fernando López SañayNo ratings yet
- Krypton 4 EsDocument3 pagesKrypton 4 EsPatricia SaamNo ratings yet
- 4 Ejemplos de Interfaz GestualDocument2 pages4 Ejemplos de Interfaz Gestualpepe pepeNo ratings yet
- Computación Ubicua, Realidad Virtual, Realidad Aumentada e Internet de Las CosasDocument11 pagesComputación Ubicua, Realidad Virtual, Realidad Aumentada e Internet de Las CosasAlicia NicoleNo ratings yet
- Paper-Robot ArañaDocument3 pagesPaper-Robot ArañaAmalias Sotelo VillanuevaNo ratings yet
- Reprote de Estadia DefinitivoDocument53 pagesReprote de Estadia DefinitivoALAN JARED LAGUNA RAMIREZNo ratings yet
- Proyecto de Ciclo - Banda TransportadoraDocument7 pagesProyecto de Ciclo - Banda TransportadoraCarlos Enrique De Gumucio VargasNo ratings yet
- 018 - Sistema de Movimiento Imagen para Manipulaciã N de Alto Riesgo Usando Visiã N ArtificialDocument5 pages018 - Sistema de Movimiento Imagen para Manipulaciã N de Alto Riesgo Usando Visiã N ArtificialDiego MuñaquiNo ratings yet
- Diseño e Implementación Un Sistema Inteligente en Un Robot para El Seguimiento de TrayectoriaDocument17 pagesDiseño e Implementación Un Sistema Inteligente en Un Robot para El Seguimiento de TrayectoriaPerccy CastilloNo ratings yet
- Robot TeledirigidoDocument4 pagesRobot TeledirigidojuanNo ratings yet
- Tele Operacion de Un Robot Medinte Realidad AumentadaDocument11 pagesTele Operacion de Un Robot Medinte Realidad AumentadaNeo SolisNo ratings yet
- MouseDocument6 pagesMouseariel rochaNo ratings yet
- FFT ProgramadaDocument66 pagesFFT ProgramadaclaytonherreraNo ratings yet
- Captura de Pantalla 2022-05-04 A La(s) 3.06.45 P.M.Document3 pagesCaptura de Pantalla 2022-05-04 A La(s) 3.06.45 P.M.Paula BuenoNo ratings yet
- Avance SolucionarElProblema IvansierraDocument6 pagesAvance SolucionarElProblema IvansierraJuan Miguel MuñozNo ratings yet
- DISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)Document4 pagesDISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)joseiutNo ratings yet
- Roboticas-VelocistaDocument6 pagesRoboticas-VelocistaDiana MahechaNo ratings yet
- 83 PDFDocument10 pages83 PDFMeri SangoquizaNo ratings yet
- Computadoras Del FuturoDocument6 pagesComputadoras Del FuturoErika Reyes100% (1)
- Paper Mano RoboticaDocument5 pagesPaper Mano RoboticaDiego MuñaquiNo ratings yet
- TFG - Berjon Valles, AnaDocument112 pagesTFG - Berjon Valles, AnaNadia JaraNo ratings yet
- Plicación de Inteligencia Ambiental para La Plataforma de Cámaras Inteligentes NteoxDocument89 pagesPlicación de Inteligencia Ambiental para La Plataforma de Cámaras Inteligentes NteoxAmazing ThingsNo ratings yet
- Robot Delta ProyectoDocument4 pagesRobot Delta ProyectoAyanami MartinezNo ratings yet
- Aprendizaje Profundo para La Identificacion de Objetos en Robótica MóvilDocument9 pagesAprendizaje Profundo para La Identificacion de Objetos en Robótica MóvilAnonymous baiz9RdSNo ratings yet
- Plan solucionar problema roboticaDocument7 pagesPlan solucionar problema roboticaJhon SuarezNo ratings yet
- 42 Jaime Andres Vanegas Beltran - Fase 1 - Aporte IndividualDocument8 pages42 Jaime Andres Vanegas Beltran - Fase 1 - Aporte IndividualAlejita ApraezNo ratings yet
- Vehiculo Teledirigido Por Internet para TelepresenciaDocument10 pagesVehiculo Teledirigido Por Internet para TelepresenciaAnonymous 6WUzAScL2No ratings yet
- Tutorial PicDocument29 pagesTutorial PicAngel ChicchonNo ratings yet
- Lectura de Drones para Marcaje de ContenedoresDocument7 pagesLectura de Drones para Marcaje de ContenedoresAnonymous 6WUzAScL2No ratings yet
- TFG-Reñones-Domínguez-2017 - Manipulacion Objetos Vision Artificial PDFDocument65 pagesTFG-Reñones-Domínguez-2017 - Manipulacion Objetos Vision Artificial PDFAnonymous 6WUzAScL2No ratings yet
- Manual de Microcontroladores PICDocument68 pagesManual de Microcontroladores PICabraham-tellez-5555No ratings yet
- 55acaf693a19b PDFDocument191 pages55acaf693a19b PDFAnonymous 6WUzAScL2No ratings yet
- Control de Un UAV de Ala Fija en ExterioresDocument11 pagesControl de Un UAV de Ala Fija en ExterioresAnonymous 6WUzAScL2No ratings yet
- Leccion 1 (Actividad 1) - Introducion A La Tecnologia Celular PDFDocument4 pagesLeccion 1 (Actividad 1) - Introducion A La Tecnologia Celular PDFEdwin LozanoNo ratings yet
- INVE - MEM - 2013 - 165051 - Kinect Como Sensor para Pulverizacion InteligenteDocument6 pagesINVE - MEM - 2013 - 165051 - Kinect Como Sensor para Pulverizacion InteligenteAnonymous 6WUzAScL2No ratings yet
- Artículo SAAEI - Plataforma UcDocument6 pagesArtículo SAAEI - Plataforma UcekinetNo ratings yet
- 55780c5b88b0d - Vehiculo Navegacion Autonoma Inspeccion CultivosDocument11 pages55780c5b88b0d - Vehiculo Navegacion Autonoma Inspeccion CultivosAnonymous 6WUzAScL2No ratings yet
- TFG-Reñones-Domínguez-2017 - Manipulacion Objetos Vision Artificial PDFDocument65 pagesTFG-Reñones-Domínguez-2017 - Manipulacion Objetos Vision Artificial PDFAnonymous 6WUzAScL2No ratings yet
- Leccion 1 (Actividad 1) - Introducion A La Tecnologia Celular PDFDocument4 pagesLeccion 1 (Actividad 1) - Introducion A La Tecnologia Celular PDFEdwin LozanoNo ratings yet
- T.te Marquez Ortiz John Hanner (Uc Pic)Document123 pagesT.te Marquez Ortiz John Hanner (Uc Pic)Anonymous 6WUzAScL2No ratings yet
- UAM7364Document80 pagesUAM7364Hector AvendañoNo ratings yet
- MemòriaDocument121 pagesMemòriaNathy Princess CuevaNo ratings yet
- CPR Cursillo CnuRT 4Document0 pagesCPR Cursillo CnuRT 4Ignovacion TegnologicaNo ratings yet
- ID107 Intro DsPÏCDocument27 pagesID107 Intro DsPÏCAnonymous 6WUzAScL2100% (1)
- Tutorial PicDocument136 pagesTutorial PicDanny Paguay100% (3)
- Curso de PICDocument32 pagesCurso de PICPablo Andrés100% (11)
- Curso de Microcontroladores Pic18f4550Document69 pagesCurso de Microcontroladores Pic18f4550Toño Man Aat100% (1)
- Lea en Español y Hable Inglés en 90 Días - Francisco G. Hernandez M.Document250 pagesLea en Español y Hable Inglés en 90 Días - Francisco G. Hernandez M.TESA100% (1)
- Apunte PUCV - Algebra Lineal (Luisa Aburto)Document262 pagesApunte PUCV - Algebra Lineal (Luisa Aburto)Macarena Catalán González100% (1)
- Electricidad Y Electrónica - Agustín RelaDocument285 pagesElectricidad Y Electrónica - Agustín RelaAnonymous 6WUzAScL250% (4)
- Puente Inversor Trifasico - Diseño y ConstruccionDocument149 pagesPuente Inversor Trifasico - Diseño y ConstruccionAnonymous 6WUzAScL2100% (1)
- Diodo Schottky BarreraDocument6 pagesDiodo Schottky BarreraAndres GuevaraNo ratings yet
- Circuitos de Control en Lectronica de PotenciaDocument46 pagesCircuitos de Control en Lectronica de PotenciaAnonymous 6WUzAScL2No ratings yet
- Diseño Gráfico y ResoluciónDocument36 pagesDiseño Gráfico y ResoluciónXimena Anabel Linares SotoNo ratings yet
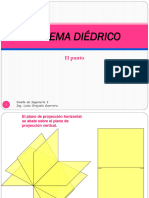
- Sistema Diedrico PuntoDocument5 pagesSistema Diedrico PuntoALEXANDRA BRIGHIT VELARDE ESCOBARNo ratings yet
- Lamina Como Dibujar La Pieza Con Las Vistas PDFDocument1 pageLamina Como Dibujar La Pieza Con Las Vistas PDFmitecnoinglesNo ratings yet
- IA MultimodalDocument2 pagesIA MultimodalrojasperezjoaquinliNo ratings yet
- FOTOGRAMETRÍA - Analítica y DigitalDocument54 pagesFOTOGRAMETRÍA - Analítica y DigitalnerardoNo ratings yet
- Proyecto de Grado - Claudia SanchezDocument163 pagesProyecto de Grado - Claudia SanchezwallywigerNo ratings yet
- Clase 07 - IADocument22 pagesClase 07 - IAVictorMotaNo ratings yet
- Vision Por Computadora de IncubadoraDocument4 pagesVision Por Computadora de IncubadoraBrian TorresNo ratings yet
- Dibujo Técnico - Tipos de Perspectivas - MVBlogDocument36 pagesDibujo Técnico - Tipos de Perspectivas - MVBlogchiazzaroNo ratings yet
- IA en Acción - Cinco Casos Prácticos - MicrosoftDocument43 pagesIA en Acción - Cinco Casos Prácticos - MicrosoftGiugliaNo ratings yet
- Perspectiva Cónica 2 Puntos de Fuga Método MatemáticoDocument10 pagesPerspectiva Cónica 2 Puntos de Fuga Método Matemáticoivan castroNo ratings yet
- Bitacora SimulacionDocument12 pagesBitacora SimulacionDiego FélixNo ratings yet
- P-1 Control Vision EstereoscopicaDocument3 pagesP-1 Control Vision EstereoscopicaleandroNo ratings yet
- Historia y escalas de la fotogrametría aéreaDocument32 pagesHistoria y escalas de la fotogrametría aérealuis angel lopez palpa0% (1)
- Tipos de Perspectivas AxonométricaDocument13 pagesTipos de Perspectivas AxonométricaMiguel de Maria0% (1)
- Geometria Descriptiva-ADocument7 pagesGeometria Descriptiva-AKARLA CECILIA CASTRO CARPIONo ratings yet
- El Libro de Prueba de Bernell Stereo Contiene Tres Secciones de PruebaDocument3 pagesEl Libro de Prueba de Bernell Stereo Contiene Tres Secciones de PruebamaranatadennisNo ratings yet
- Evaluacion Final - Escenario 8Document11 pagesEvaluacion Final - Escenario 8carol gonzalezNo ratings yet
- Dibujo Arquitectonico 3 PERSPECTIVA ORTOGONALDocument35 pagesDibujo Arquitectonico 3 PERSPECTIVA ORTOGONALHector Gomez de la TorreNo ratings yet
- Cotización 534-dDocument2 pagesCotización 534-djose2chemo2orihuelaNo ratings yet
- CV DMCDocument3 pagesCV DMCYesuly AndradeNo ratings yet
- @createcolDocument17 pages@createcolErik CjNo ratings yet
- Ejercicios de Perspectiva Isométrica Con Planos Paralelos A Los Del SistemaDocument8 pagesEjercicios de Perspectiva Isométrica Con Planos Paralelos A Los Del SistemaeltallerdedibujoNo ratings yet
- 2014 01 08ejercicios FotogrametriaDocument26 pages2014 01 08ejercicios FotogrametriaArnold OlascoagaNo ratings yet
- Como Convertir Un Archivo JPG en PDF OnlineDocument2 pagesComo Convertir Un Archivo JPG en PDF OnlineCherylNo ratings yet
- Detección de formas y segmentación de imágenes mediante análisis de contornosDocument5 pagesDetección de formas y segmentación de imágenes mediante análisis de contornoshorlandovragasNo ratings yet
- Resumen De-Diseno de Un Sistema Automatico de Seleccion de Frutos de Cafe Mediante Tecnicas de Vision ArtificialDocument7 pagesResumen De-Diseno de Un Sistema Automatico de Seleccion de Frutos de Cafe Mediante Tecnicas de Vision ArtificialeliNo ratings yet
- Examen Parcial 1Document17 pagesExamen Parcial 1Amin Daniel CorralNo ratings yet
- Tema 5Document25 pagesTema 5Marta SanchezNo ratings yet
- DICOM. Conceptos BásicosDocument7 pagesDICOM. Conceptos BásicosAlejandro BertoletNo ratings yet