You might also like
- Steel Ana O'Brien CatalogDocument140 pagesSteel Ana O'Brien CatalogCarlos ElchamiNo ratings yet
- Automatic Missile Detection SystemDocument17 pagesAutomatic Missile Detection SystemMOHAMMAD ASLAMNo ratings yet
- Bibliography Report Quadrotor Control MethodsDocument47 pagesBibliography Report Quadrotor Control MethodsPablo Fernández de la Granja100% (2)
- Radio Remote-Control and Telemetry and Their Application to MissilesFrom EverandRadio Remote-Control and Telemetry and Their Application to MissilesRating: 4 out of 5 stars4/5 (1)
- Agricultural Structures 2019Document71 pagesAgricultural Structures 2019Rabson NjaravavaniNo ratings yet
- Missile Detection and DestroyerDocument6 pagesMissile Detection and DestroyeranushreeNo ratings yet
- Microcontroller Based Radar SystemDocument19 pagesMicrocontroller Based Radar SystemMeet MakwanaNo ratings yet
- Microcontroller Based Automatic Missile Detection and Destroy SystemDocument31 pagesMicrocontroller Based Automatic Missile Detection and Destroy SystemMOHAMMAD ASLAMNo ratings yet
- Microcontroller Based Missile Detection and Destroying 8154 Rv8KK7qDocument21 pagesMicrocontroller Based Missile Detection and Destroying 8154 Rv8KK7qThor OdinsonNo ratings yet
- Seminar Report On Missile Detection SystemDocument26 pagesSeminar Report On Missile Detection SystemSaurabh SinghNo ratings yet
- Missile Detection and Auto Destroy System DocumentDocument61 pagesMissile Detection and Auto Destroy System Documentdileeppatra100% (6)
- Technical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed SensorsDocument3 pagesTechnical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed Sensorshamed razaNo ratings yet
- Gourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleDocument19 pagesGourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleRaj MandloiNo ratings yet
- Dish Positioning Control by IR RemoteDocument5 pagesDish Positioning Control by IR Remoteomonacho100% (1)
- Health Monitoring GloveDocument7 pagesHealth Monitoring GloveYashNo ratings yet
- Diamond Security System in A Museum With Loud 60dB SireN1Document50 pagesDiamond Security System in A Museum With Loud 60dB SireN1Midde ShekarNo ratings yet
- Vehicle Tracking System Using GPS and GSM TechnologyDocument5 pagesVehicle Tracking System Using GPS and GSM TechnologyIJRASETPublicationsNo ratings yet
- Smart Notice BoardDocument42 pagesSmart Notice BoardDhiraj BhattNo ratings yet
- Electric Lineman Safety System using One Time Passwords (OTPDocument63 pagesElectric Lineman Safety System using One Time Passwords (OTPSiva KumarNo ratings yet
- Iot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaDocument17 pagesIot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaakashlogicNo ratings yet
- Iot Based Surveillance Robot IJERTV7IS030061Document5 pagesIot Based Surveillance Robot IJERTV7IS030061rgkusumbaNo ratings yet
- Automatic Ration Distribution by Using Raspberry PiDocument5 pagesAutomatic Ration Distribution by Using Raspberry PiIJIRSTNo ratings yet
- Motor Speed Control System by Using GSM MobileDocument16 pagesMotor Speed Control System by Using GSM MobileAditya TomarNo ratings yet
- A Study On Plasma AntennaDocument2 pagesA Study On Plasma AntennaJimi JimiNo ratings yet
- Intelligent Ambulance Traffic Light SystemDocument19 pagesIntelligent Ambulance Traffic Light SystemSampath Kumar BejgamaNo ratings yet
- Pce Mini Project Report: "RF Transmitter and Receiver"Document9 pagesPce Mini Project Report: "RF Transmitter and Receiver"sumit sanchetiNo ratings yet
- MTech (DCN) DEC-I ManualDocument34 pagesMTech (DCN) DEC-I ManualMallikarjun DeshmukhNo ratings yet
- Cognitive RadioDocument33 pagesCognitive RadioJanardhan Reddy TNo ratings yet
- Women Safety Night Patrolling RobotDocument8 pagesWomen Safety Night Patrolling RobotIJRASETPublicationsNo ratings yet
- IoT Based Hydroponic Monitoring SystemDocument9 pagesIoT Based Hydroponic Monitoring SystemUrmatan MarvinNo ratings yet
- Substation Protection Devices ExplainedDocument24 pagesSubstation Protection Devices ExplainedAshish AgarwalNo ratings yet
- Password Based Circuit BreakerDocument7 pagesPassword Based Circuit BreakerAnuj TripathiNo ratings yet
- Project Report 2Document28 pagesProject Report 2akhileshNo ratings yet
- Project Reprt333Document49 pagesProject Reprt333dhirajsingh_avit83% (6)
- Ultrasonic sensor spectacles guide blind peopleDocument19 pagesUltrasonic sensor spectacles guide blind peopleparitosh kushwahaNo ratings yet
- DC MOTOR GSM REORT FinalDocument28 pagesDC MOTOR GSM REORT FinalUMADEVI K MNo ratings yet
- Smart Helmet For Bike Rider Safety Final PPT Copy 2Document15 pagesSmart Helmet For Bike Rider Safety Final PPT Copy 2Ashish PandeyNo ratings yet
- Accident Detection System Using GPS and GSMDocument15 pagesAccident Detection System Using GPS and GSMPadma Vasavi KNo ratings yet
- AI-Based Navigator For Hassle-Free Navigation For Visually ImpairedDocument6 pagesAI-Based Navigator For Hassle-Free Navigation For Visually Impairednihal bhandaryNo ratings yet
- Arduino-Based Ultrasonic Radar System Detects Objects Under 40cmDocument1 pageArduino-Based Ultrasonic Radar System Detects Objects Under 40cmosamaNo ratings yet
- Intelligent System For Toxic Gas Detection Using GSMDocument36 pagesIntelligent System For Toxic Gas Detection Using GSMstalin882657% (7)
- Final PPT (Autosaved)Document34 pagesFinal PPT (Autosaved)KARTHIK.K 18BEC023No ratings yet
- 13 IoT Based Electrical Device Surveillance and Control SystemDocument3 pages13 IoT Based Electrical Device Surveillance and Control SystemdileeppatraNo ratings yet
- IOT BASED SMART EV WIRELESS CHARGING LANE WITH REAL TIME LOCATION TRACKING Ijariie17236Document5 pagesIOT BASED SMART EV WIRELESS CHARGING LANE WITH REAL TIME LOCATION TRACKING Ijariie17236Divya G KNo ratings yet
- Coin Detection Mobile ChargingDocument39 pagesCoin Detection Mobile ChargingAman GuptaNo ratings yet
- Power Theft by IOTT 1Document11 pagesPower Theft by IOTT 1Manoj KolliparaNo ratings yet
- Automatic Traffic Light Control System Using Image Processing in EthiopiaDocument1 pageAutomatic Traffic Light Control System Using Image Processing in EthiopiaShubham LandeNo ratings yet
- Blind Stick NewDocument40 pagesBlind Stick NewPriya KabirNo ratings yet
- Project Presentation PDFDocument22 pagesProject Presentation PDFARIF KANONNo ratings yet
- EEE 3210 Final Project ReportDocument19 pagesEEE 3210 Final Project ReportDerrick ThamNo ratings yet
- Technologies: Research and Application of A SCADA System For A MicrogridDocument11 pagesTechnologies: Research and Application of A SCADA System For A MicrogridDave KevinNo ratings yet
- Android Controlled Wildlife Observation RobotDocument83 pagesAndroid Controlled Wildlife Observation RobotdileeppatraNo ratings yet
- Easy To Swallow Wireless TelemetryDocument23 pagesEasy To Swallow Wireless TelemetryAshok GudivadaNo ratings yet
- Software Defined Cognitive Radio Using Labview-Ieee FormatDocument6 pagesSoftware Defined Cognitive Radio Using Labview-Ieee FormatRijul ChoudhryNo ratings yet
- Patient Monitoring System Using GSM For Hospitals and Old Age HomesDocument5 pagesPatient Monitoring System Using GSM For Hospitals and Old Age Homesvgmanjunatha100% (1)
- Iot Enabled Forest Fire Detection and Early Warning SystemDocument14 pagesIot Enabled Forest Fire Detection and Early Warning Systemiot forumNo ratings yet
- Project Report FinalDocument60 pagesProject Report Finalaisha singhNo ratings yet
- Int Fire Alarm - CPL Okems Tu (HND)Document80 pagesInt Fire Alarm - CPL Okems Tu (HND)NjitnumNo ratings yet
- 986 1059 PB PDFDocument6 pages986 1059 PB PDFmadan kumarNo ratings yet
- Development of An Embedded System For Distance Measuring Using Ultrasonic SensorDocument4 pagesDevelopment of An Embedded System For Distance Measuring Using Ultrasonic SensornikhithaNo ratings yet
- Infrared Object Position Locator: Oladapo, Opeoluwa AyokunleDocument44 pagesInfrared Object Position Locator: Oladapo, Opeoluwa Ayokunleoopeoluwa_1No ratings yet
- .Follower Robotic Cart Using Ultrasonic SensorDocument4 pages.Follower Robotic Cart Using Ultrasonic SensorArvin LanceNo ratings yet
- Annexure To VMSDocument13 pagesAnnexure To VMSMelissa FieldsNo ratings yet
- Energy Conscious Architecture - Edge AmsterdamDocument7 pagesEnergy Conscious Architecture - Edge AmsterdamPriyanjita AdhikariNo ratings yet
- Sigrafil C Pan Based Carbon Fiber eDocument8 pagesSigrafil C Pan Based Carbon Fiber eMomberg Huggler Ribeiro OliveiraNo ratings yet
- Machine DesignDocument14 pagesMachine Designraj gangwarNo ratings yet
- T PAUL Uni DuE 2014-10-07Document118 pagesT PAUL Uni DuE 2014-10-07Le LuuNo ratings yet
- MF 02 01 Hazards Identification Risk Assessments and Controls Issue 1Document11 pagesMF 02 01 Hazards Identification Risk Assessments and Controls Issue 1Bhanu Pratap ChoudhuryNo ratings yet
- Iw-02 Lime Stucco Waterproof Finish Rev 02 Final PDFDocument115 pagesIw-02 Lime Stucco Waterproof Finish Rev 02 Final PDFlinga2014No ratings yet
- M.M.A. Welding ElectrodeDocument1 pageM.M.A. Welding ElectrodecwiksjNo ratings yet
- Water Management ManualDocument175 pagesWater Management Manualwinston100% (3)
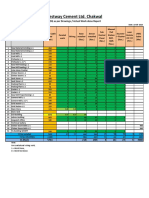
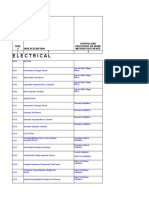
- Bestway Cement Ltd. Chakwal: BOQ As Per Drawings / Actual Work Done ReportDocument2 pagesBestway Cement Ltd. Chakwal: BOQ As Per Drawings / Actual Work Done ReportIsrar HussainNo ratings yet
- LMI Seal Gap System BrochureDocument4 pagesLMI Seal Gap System Brochurekanzi12No ratings yet
- SAUER DANFOSS Series 45 E Frame Open Circuit Axial Piston Pumps Service IOM FOR TOLKO PDFDocument32 pagesSAUER DANFOSS Series 45 E Frame Open Circuit Axial Piston Pumps Service IOM FOR TOLKO PDFJAGDEV PANESARNo ratings yet
- Escavadora John Deere 120CDocument553 pagesEscavadora John Deere 120CGilberto Torres83% (6)
- Sl5ds2 Switch and Check ValveDocument4 pagesSl5ds2 Switch and Check ValveHassan ShathakNo ratings yet
- Modeling of Spindle-Bearing and Machine Tool Systems For Virtual Simulation of Milling OperationsDocument9 pagesModeling of Spindle-Bearing and Machine Tool Systems For Virtual Simulation of Milling OperationsYak OubNo ratings yet
- Resinas Castro CrysticDocument11 pagesResinas Castro Crysticsepe00No ratings yet
- Azipod PresentationDocument18 pagesAzipod Presentationkhaihui100% (1)
- Furniture StylesDocument41 pagesFurniture StylesKarthi Keyan RNo ratings yet
- AGI CatalogDocument8 pagesAGI Cataloghusein965No ratings yet
- Ae01 PDFDocument34 pagesAe01 PDFTrajko GorgievskiNo ratings yet
- Left4dead PolishDocument49 pagesLeft4dead PolishmvnivanNo ratings yet
- Clay ProductsDocument40 pagesClay ProductsRaghav100% (1)
- Lapp - Pro217en - PT FSL 5x075 - Db0034302en - DatasheetDocument1 pageLapp - Pro217en - PT FSL 5x075 - Db0034302en - DatasheetMihai BancuNo ratings yet
- Catalog MasterLogic-200 Eng R02Document46 pagesCatalog MasterLogic-200 Eng R02Marky SpicerNo ratings yet
- EnMS ToolsDocument66 pagesEnMS ToolsMoriyasuNguyenNo ratings yet
- Quality Plan For Electrical WorkDocument16 pagesQuality Plan For Electrical WorknercyNo ratings yet
- Advances in Drilling: Drill Bit InnovationsDocument96 pagesAdvances in Drilling: Drill Bit InnovationsshaonaaNo ratings yet
- AS 1544.2-2003 Hoja7 Pag5Document1 pageAS 1544.2-2003 Hoja7 Pag5elmerNo ratings yet