You might also like
- Projeto de Instalacoes EletricasDocument3 pagesProjeto de Instalacoes EletricasGabriel AlvesNo ratings yet
- Matriz Curricular do Curso Técnico em EletrotécnicaDocument1 pageMatriz Curricular do Curso Técnico em EletrotécnicaGabriel AlvesNo ratings yet
- RmsDocument12 pagesRmschrystiano1No ratings yet
- Medições de grandezas elétricas em ACDocument15 pagesMedições de grandezas elétricas em ACGabriel AlvesNo ratings yet
- Juntos Pelo Brasil Solar-CARTA ABERTA-Em Defesa Da Energia Solar Distribuída-04-03-21Document6 pagesJuntos Pelo Brasil Solar-CARTA ABERTA-Em Defesa Da Energia Solar Distribuída-04-03-21Gabriel AlvesNo ratings yet
- Paralelismo de inversores de tensão aplicado a nobreaks: estratégias de controle e exemplo de projetoDocument162 pagesParalelismo de inversores de tensão aplicado a nobreaks: estratégias de controle e exemplo de projetoWendell CarlosNo ratings yet
- EletrotecnicaDocument26 pagesEletrotecnicaIvan AndradaNo ratings yet
- Distúrbios em Frequência: Causas, Efeitos, Soluções e NormasDocument51 pagesDistúrbios em Frequência: Causas, Efeitos, Soluções e NormasEleuterio de FatimaNo ratings yet
- Grand SinusDocument10 pagesGrand SinusGabriel AlvesNo ratings yet
- Cabos Eletricos para Instalacoes Fotovoltaicas Hilton Moreno COBRECOMDocument72 pagesCabos Eletricos para Instalacoes Fotovoltaicas Hilton Moreno COBRECOMAdilson Leite ProençaNo ratings yet
- Spda Análise de Risco2Document27 pagesSpda Análise de Risco2MARIA DAS NOGUEIRA DE CASTRONo ratings yet
- Projeto Direto Da ObraDocument2 pagesProjeto Direto Da ObraGabriel AlvesNo ratings yet
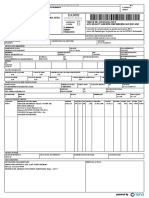
- Danfe: Identificação Do Emitente Mazer Distribuidora Ltda Chave de Acesso Da Nf-EDocument1 pageDanfe: Identificação Do Emitente Mazer Distribuidora Ltda Chave de Acesso Da Nf-EGabriel AlvesNo ratings yet
- Grandezas Elétricas - Ufsc PDFDocument34 pagesGrandezas Elétricas - Ufsc PDFAngelaCoelhoNo ratings yet
- Equatorial Maranhão Distribuidora de Energia S.A.: Informações para O ClienteDocument1 pageEquatorial Maranhão Distribuidora de Energia S.A.: Informações para O ClienteGabriel AlvesNo ratings yet
- Cargas lineares e não-lineares e seus impactos na qualidade da energiaDocument12 pagesCargas lineares e não-lineares e seus impactos na qualidade da energiaGabriel AlvesNo ratings yet
- Ren 2015-687Document25 pagesRen 2015-687Kleber RissardiNo ratings yet
- Cargas lineares e não-lineares e seus impactos na qualidade da energiaDocument12 pagesCargas lineares e não-lineares e seus impactos na qualidade da energiaGabriel AlvesNo ratings yet
- Introducaoo A Eletricidade - IBRATECDocument79 pagesIntroducaoo A Eletricidade - IBRATECtiberioceszarNo ratings yet
- Módulo 8-Revisão 12Document88 pagesMódulo 8-Revisão 12Pedro AlmeidaNo ratings yet
- EPX Engenharia oferece solução fotovoltaicaDocument10 pagesEPX Engenharia oferece solução fotovoltaicaGabriel AlvesNo ratings yet
- Live Venda, Projeto, e Instalação - CompressedDocument13 pagesLive Venda, Projeto, e Instalação - CompressedGabriel AlvesNo ratings yet
- Modelo técnico microgeraçãoDocument12 pagesModelo técnico microgeraçãoEdson AlmeidaNo ratings yet
- EBook - MP 998Document28 pagesEBook - MP 998Gabriel AlvesNo ratings yet
- AterramentoDocument27 pagesAterramentoJonis SantosNo ratings yet
- Esquemas Elétricos de AterramentoDocument6 pagesEsquemas Elétricos de AterramentoMarco Antonio100% (2)
- Correção Do FP - WEGDocument40 pagesCorreção Do FP - WEGGuilherme Villaça Mendes de OliveiraNo ratings yet
- TN STP 214 267 27339Document14 pagesTN STP 214 267 27339Gabriel AlvesNo ratings yet
- Soluções fotovoltaicas de 1 a 5 MVADocument20 pagesSoluções fotovoltaicas de 1 a 5 MVAJadiel Mendonça100% (1)
- Fator de Potência - o Guia DefinitivoDocument12 pagesFator de Potência - o Guia DefinitivoGabriel Alves100% (1)
- 03 - EFD Contribuições Lucro PresumidoDocument50 pages03 - EFD Contribuições Lucro PresumidoMarcello MelloNo ratings yet
- Guia Da Venda Expressa 2.0 Funciona? (NÃO COMPRE ANTES DE LER ISSO)Document30 pagesGuia Da Venda Expressa 2.0 Funciona? (NÃO COMPRE ANTES DE LER ISSO)AcrianoBRNo ratings yet
- Lista de Exercícios 1Document3 pagesLista de Exercícios 1Rosana Mendes100% (1)
- Chopper RoadDocument42 pagesChopper RoadDaiane LealNo ratings yet
- Georreferenciamento de Imóveis RuraisDocument27 pagesGeorreferenciamento de Imóveis RuraisAlexandre Parente LimaNo ratings yet
- Manual Aduaneiro - Retificação de D.IDocument11 pagesManual Aduaneiro - Retificação de D.IMarcello Aires RomãoNo ratings yet
- Principais componentes e sistemas de aeronavesDocument2 pagesPrincipais componentes e sistemas de aeronavesFilyp Lima100% (1)
- Execução de radierDocument2 pagesExecução de radiergferreira475No ratings yet
- Regra de Três e Proporcionalidade em 46 QuestõesDocument10 pagesRegra de Três e Proporcionalidade em 46 QuestõesWagner Silva0% (1)
- SE Manual Operaçao e Manutençao 01-10-2008Document82 pagesSE Manual Operaçao e Manutençao 01-10-2008Rodrigo Debora BelloniNo ratings yet
- CAP7 EE2 ArvdecapostDocument8 pagesCAP7 EE2 ArvdecapostCleodenis Galvão FariasNo ratings yet
- 0 - Ações Devidas Ao Vento em Edificações - João Alfredo Azzi PittaDocument47 pages0 - Ações Devidas Ao Vento em Edificações - João Alfredo Azzi PittaWilliam PolNo ratings yet
- Ementa disciplinaDocument4 pagesEmenta disciplinaRaphael FreitasNo ratings yet
- Treinamento Terex - 2014Document210 pagesTreinamento Terex - 2014Israel de sousa junior100% (3)
- Metodologia A3 como instrumento de melhoria contínuaDocument15 pagesMetodologia A3 como instrumento de melhoria contínuaAnderson Morgado100% (1)
- Introdução ao Proxy IPCOP e seus recursosDocument20 pagesIntrodução ao Proxy IPCOP e seus recursosJunior MarchiNo ratings yet
- Seleção e Combinação Criativa de FontesDocument24 pagesSeleção e Combinação Criativa de FontesGer MayNo ratings yet
- Catálogo BRM 2020 com rolamentos, mancais e fixações para indústriaDocument148 pagesCatálogo BRM 2020 com rolamentos, mancais e fixações para indústriaClaimir GuinzelliNo ratings yet
- Aspectos Fitossociológicos Do Bosque Rodrigues Alves - Jardim Botânico Da Amazônia, 15 Hectares de Floresta Preservada em Meio Ao Espaço Urbano Da Cidade de Belém PDFDocument4 pagesAspectos Fitossociológicos Do Bosque Rodrigues Alves - Jardim Botânico Da Amazônia, 15 Hectares de Floresta Preservada em Meio Ao Espaço Urbano Da Cidade de Belém PDFEmilio MilitoNo ratings yet
- Sistema de Gestão de ImoveisDocument82 pagesSistema de Gestão de Imoveissergioluis34No ratings yet
- Convecção Calor TransferênciaDocument3 pagesConvecção Calor TransferênciaJafar DarioNo ratings yet
- Projeto-Prático DidáticaDocument23 pagesProjeto-Prático DidáticaThiago SilverioNo ratings yet
- Fechadura KAADAS ApresentaçãoDocument9 pagesFechadura KAADAS ApresentaçãoStandartNo ratings yet
- Avaliação 30 Pontos - Raciocínio Lógico e Análise de Dados - APR00012021U286Document4 pagesAvaliação 30 Pontos - Raciocínio Lógico e Análise de Dados - APR00012021U286RHYAN PERICLES DE OLIVEIRA GALVAONo ratings yet
- Controle biológico: fundamentos ecológicosDocument175 pagesControle biológico: fundamentos ecológicosAdrian Prieto Ruiz100% (1)
- História e aplicações dos lubrificantes na agroindústriaDocument28 pagesHistória e aplicações dos lubrificantes na agroindústriaHansMikuNo ratings yet
- 19 - DiagramaDocument5 pages19 - DiagramaPredador StealthNo ratings yet
- Manual DreamboxDocument43 pagesManual DreamboxCristiane Cardoso100% (2)
- Instalação base teste autoatendimentoDocument22 pagesInstalação base teste autoatendimentoMicroCell AtcNo ratings yet
- Materiais de Construção II-Cerâmicas PDFDocument61 pagesMateriais de Construção II-Cerâmicas PDFAline PinheiroNo ratings yet