You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Final Report Personal Expense TrackerDocument40 pagesFinal Report Personal Expense TrackerSanjay Adhikari74% (27)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Online Grading SystemDocument31 pagesOnline Grading SystemJhandy Abella77% (22)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ABB Protection Application HandbookDocument356 pagesABB Protection Application HandbookSyed Muhammad Munavvar HussainNo ratings yet
- Motors and Drives A Practical Technology Guide Dave PolkaDocument387 pagesMotors and Drives A Practical Technology Guide Dave Polkamurad6a9100% (9)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Systems Thinking and IslamDocument9 pagesSystems Thinking and Islamaman_siddiqiNo ratings yet
- MIS Design and Development - PhasesDocument59 pagesMIS Design and Development - Phasesmanojmis201076% (17)
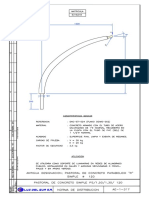
- AE-1-317 Pastoral Concreto ParabolicoDocument1 pageAE-1-317 Pastoral Concreto ParabolicoEasy Energy SAC100% (1)
- Nema mg-1 2009Document671 pagesNema mg-1 2009Erick LeónNo ratings yet
- AE-1-316 Pastoral Simple ConcretoDocument1 pageAE-1-316 Pastoral Simple ConcretoEasy Energy SACNo ratings yet
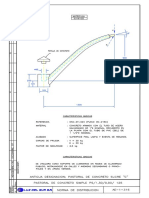
- AE-1-318 Pastoral Concreto ParabolicoDocument1 pageAE-1-318 Pastoral Concreto ParabolicoEasy Energy SACNo ratings yet
- A MATLAB Primer in Four Hours With Practical ExamplesDocument23 pagesA MATLAB Primer in Four Hours With Practical ExamplesMudasir QureshiNo ratings yet
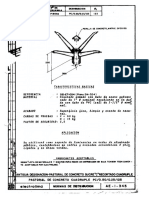
- AE-1-345 Pastoral Sucre CuadrupleDocument1 pageAE-1-345 Pastoral Sucre CuadrupleEasy Energy SACNo ratings yet
- AE-1-340 Pastoral Acero Simple LargoDocument1 pageAE-1-340 Pastoral Acero Simple LargoEasy Energy SACNo ratings yet
- AE-1-335 Pastoral Sucre TripleDocument1 pageAE-1-335 Pastoral Sucre TripleEasy Energy SACNo ratings yet
- AE-1-336 Pastoral Sucre TripleDocument1 pageAE-1-336 Pastoral Sucre TripleEasy Energy SACNo ratings yet
- AE 1 315 Pastoral SucreDocument1 pageAE 1 315 Pastoral SucreEasy Energy SACNo ratings yet
- AE-1-325 Pastoral Sucre DobleDocument1 pageAE-1-325 Pastoral Sucre DobleEasy Energy SACNo ratings yet
- Matlab Data IoDocument11 pagesMatlab Data IoEasy Energy SACNo ratings yet
- AE 1 310 Pastorales MetalicosDocument4 pagesAE 1 310 Pastorales MetalicosEasy Energy SACNo ratings yet
- AE-1-347 Pastoral Acero Simple CortoDocument1 pageAE-1-347 Pastoral Acero Simple CortoEasy Energy SACNo ratings yet
- Ad 1 007Document10 pagesAd 1 007leonardovegaNo ratings yet
- Licht Hand BuchDocument298 pagesLicht Hand BuchsumanthdixitNo ratings yet
- Dommel SatoDocument8 pagesDommel SatoEasy Energy SACNo ratings yet
- MATLAB Training CourseDocument7 pagesMATLAB Training CourseEasy Energy SACNo ratings yet
- Dunlop, Verification of Synchronous Machine Modeling in Stability Studies, 1979Document10 pagesDunlop, Verification of Synchronous Machine Modeling in Stability Studies, 1979Easy Energy SACNo ratings yet
- NAPS 2000 - Park PDFDocument15 pagesNAPS 2000 - Park PDFJacob CarterNo ratings yet
- Matlab Data IoDocument11 pagesMatlab Data IoEasy Energy SACNo ratings yet
- IEEE Task Force - Current Usage & Suggested Practices in Power System Stability Simulations For Synchronous Machines, 1986Document17 pagesIEEE Task Force - Current Usage & Suggested Practices in Power System Stability Simulations For Synchronous Machines, 1986Edinson Herrera VasquezNo ratings yet
- Electrical Equipment Handbook-7-Speed Control of Induction MotorsDocument12 pagesElectrical Equipment Handbook-7-Speed Control of Induction MotorsEasy Energy SACNo ratings yet
- Electrical TransmissionDocument851 pagesElectrical TransmissionAsif100% (6)
- Control System Documentation - SDocument242 pagesControl System Documentation - SEasy Energy SACNo ratings yet
- Electric Power GenerationDocument257 pagesElectric Power GenerationJaber ElabbasNo ratings yet
- The Project Management Information SystemDocument9 pagesThe Project Management Information SystemKenneth100% (1)
- Sustainability 02 00252Document14 pagesSustainability 02 00252Jan Karina Lapeña PadlaNo ratings yet
- Dorothy Johnson's Behavioral Systems Model in NursingDocument15 pagesDorothy Johnson's Behavioral Systems Model in NursingLouis Gabriel AdayaNo ratings yet
- Zimmermann’s Functional View of Resource ProcessDocument18 pagesZimmermann’s Functional View of Resource ProcessMohit RohajNo ratings yet
- The Hay Job Evaluation System - 2002Document6 pagesThe Hay Job Evaluation System - 2002irsanli3mNo ratings yet
- Software-Re Engineering NetDocument37 pagesSoftware-Re Engineering Nethrashid298No ratings yet
- State Based Scheduling Analysys For Distibuted Real Time SystemsDocument18 pagesState Based Scheduling Analysys For Distibuted Real Time SystemsHeriberto AguirreNo ratings yet
- System Development Life CycleDocument6 pagesSystem Development Life CycleNishanthini JanarthananNo ratings yet
- System Analysis and DesignDocument110 pagesSystem Analysis and DesignAbadir YuyaNo ratings yet
- Johnson's Behavior System Model of NursingDocument5 pagesJohnson's Behavior System Model of Nursinganjuhooda1987No ratings yet
- 6 Module 3 09 06 2023Document55 pages6 Module 3 09 06 2023Shreya RajpalNo ratings yet
- User's Guide: Version 2016 HF (11.0) March 2018Document144 pagesUser's Guide: Version 2016 HF (11.0) March 2018Anant JadhavNo ratings yet
- Curriculum TheoryDocument56 pagesCurriculum TheoryAdah AwieNo ratings yet
- Database Strategy in Development of Digital Ecosystem For Quality Control in EducationDocument6 pagesDatabase Strategy in Development of Digital Ecosystem For Quality Control in EducationТатьяна ЯмскихNo ratings yet
- MCS 014 PDFDocument3 pagesMCS 014 PDFSaurav JhaNo ratings yet
- Chapter 19 - Continous ChangeDocument7 pagesChapter 19 - Continous ChangeAzael May PenaroyoNo ratings yet
- OPERATIONS RESEARCH - DeepakDocument23 pagesOPERATIONS RESEARCH - DeepakdeepurswaniNo ratings yet
- Oose 1Document38 pagesOose 1Habtamu YihuneNo ratings yet
- Simultaneous Activities in The Offshore Petroleum IndustryDocument87 pagesSimultaneous Activities in The Offshore Petroleum IndustryGamalMahranNo ratings yet
- Sustainability Theory and Conceptual Considerations: A Review of Key Ideas For Sustainability, and The Rural ContextDocument49 pagesSustainability Theory and Conceptual Considerations: A Review of Key Ideas For Sustainability, and The Rural ContextRajendra KunwarNo ratings yet
- ISO 9001-Correlation MatricesDocument6 pagesISO 9001-Correlation MatricesLailla MarlinaNo ratings yet
- Social Welfare Agency AdministrationDocument17 pagesSocial Welfare Agency AdministrationMarion DeriloNo ratings yet
- Computer Simulations in Pharmacokinetics and PharmacodynamicsDocument6 pagesComputer Simulations in Pharmacokinetics and PharmacodynamicsSamjith ThomasNo ratings yet
- Business EnvironmentDocument227 pagesBusiness EnvironmentSHIVPRATAP SINGH TOMARNo ratings yet
- CS404 - Lecture 5 PDFDocument79 pagesCS404 - Lecture 5 PDFHenry Haruna OgijoNo ratings yet
- QTA - Qatar Tourism Authority - HOTEL CLASSIFICATION - 2017Document106 pagesQTA - Qatar Tourism Authority - HOTEL CLASSIFICATION - 2017Ladislao MaciejowskiNo ratings yet