You might also like
- Integrated Imaging of the Earth: Theory and ApplicationsFrom EverandIntegrated Imaging of the Earth: Theory and ApplicationsMax MoorkampNo ratings yet
- Baker (2011) CMS Overview, JSEDocument19 pagesBaker (2011) CMS Overview, JSEmarin_sNo ratings yet
- Conditional Mean Spectrum Tool For Ground-Motion SDocument20 pagesConditional Mean Spectrum Tool For Ground-Motion SGermar PorquerinoNo ratings yet
- Shahi and Baker 2014 (NGA-West2 Models For Ground Motion Directionality)Document21 pagesShahi and Baker 2014 (NGA-West2 Models For Ground Motion Directionality)Aline ABNNo ratings yet
- Pestana Vs 2Document9 pagesPestana Vs 2Juan Carlos Patiño BautistaNo ratings yet
- Prediction of Strong Motions From Future Earthquakes Caused by Active Faults - Case of The Osaka BasinDocument8 pagesPrediction of Strong Motions From Future Earthquakes Caused by Active Faults - Case of The Osaka BasindennNo ratings yet
- Implications of Site Specific Response AnalysisDocument17 pagesImplications of Site Specific Response AnalysishadiNo ratings yet
- Senkova Etal 2007Document14 pagesSenkova Etal 2007Libeesh LukoseNo ratings yet
- Site Response Analysis Including Earthquake Input Ground Motion and Soil Dynamic Properties VariabilityDocument10 pagesSite Response Analysis Including Earthquake Input Ground Motion and Soil Dynamic Properties VariabilityMohamed ElsayedNo ratings yet
- Abrahamson and SilvaDocument31 pagesAbrahamson and Silvajacs127No ratings yet
- 213 Laserscanning09Document6 pages213 Laserscanning09fargotty210026No ratings yet
- Using Seismic Inversion and Geostatistics To Estimate Porosity: A Western Canadian Reef ExampleDocument15 pagesUsing Seismic Inversion and Geostatistics To Estimate Porosity: A Western Canadian Reef ExampleShahid Ur RehmanNo ratings yet
- Geosciences: An Empirical Model To Account For Spectral Amplification of Pulse-Like Ground Motion RecordsDocument14 pagesGeosciences: An Empirical Model To Account For Spectral Amplification of Pulse-Like Ground Motion RecordsMilan StepanovNo ratings yet
- Topic 1 Attenuation RelationshipDocument7 pagesTopic 1 Attenuation RelationshipGleanna NiedoNo ratings yet
- CVE-311-Earthquake-Engineering-Module-Part-3Document23 pagesCVE-311-Earthquake-Engineering-Module-Part-3Anne Clarisse DionisioNo ratings yet
- Eqs 116 MDocument47 pagesEqs 116 MjeraxggNo ratings yet
- 4 - EQ-Vertical - Excerpt - FEMA P-750 and ACI 371-16Document10 pages4 - EQ-Vertical - Excerpt - FEMA P-750 and ACI 371-16Sean C TinlinNo ratings yet
- SiteSpecificSeismicHazardAnalysis McGuire ToroDocument6 pagesSiteSpecificSeismicHazardAnalysis McGuire ToroPedro Troncoso AcuñaNo ratings yet
- Jayaram Et Al (2011) Japan Correlations, E&S PDFDocument26 pagesJayaram Et Al (2011) Japan Correlations, E&S PDFMohamed ElsayedNo ratings yet
- Ambrasseys1996 - Prediction of Horizontal Response Spectra in Europe PDFDocument30 pagesAmbrasseys1996 - Prediction of Horizontal Response Spectra in Europe PDFHoracio UlloaNo ratings yet
- p311 PDFDocument6 pagesp311 PDFusjothiNo ratings yet
- Seismic Hazard Evaluation: Paul SomervilleDocument16 pagesSeismic Hazard Evaluation: Paul SomervillePrabesh ShresthaNo ratings yet
- The American Astronomical Society. All Rights Reserved. Printed in U.S.A. (Document18 pagesThe American Astronomical Society. All Rights Reserved. Printed in U.S.A. (Tee Wei LeongNo ratings yet
- Time Series Analysis of InSAR Data Methods and TrendsDocument13 pagesTime Series Analysis of InSAR Data Methods and TrendsRahardian DwityaNo ratings yet
- Relationships Between Horizontal Ground Motion DefinitionsDocument11 pagesRelationships Between Horizontal Ground Motion DefinitionsVicente SuarezNo ratings yet
- Statistical Comparison of Models For Estimating Solar Radiation On Inclined SurfacesDocument5 pagesStatistical Comparison of Models For Estimating Solar Radiation On Inclined SurfacesJames TerryNo ratings yet
- Development of Site-Specific Vertical Response SpectrumDocument10 pagesDevelopment of Site-Specific Vertical Response SpectrumAndreas Galih PamungkasNo ratings yet
- Research Article: Modelling of Solar Radiation Pressure Effects: Parameter Analysis For The MICROSCOPE MissionDocument15 pagesResearch Article: Modelling of Solar Radiation Pressure Effects: Parameter Analysis For The MICROSCOPE MissionrevankumarNo ratings yet
- Near-Field Horizontal and Vertical Earthquake Ground MotionsDocument18 pagesNear-Field Horizontal and Vertical Earthquake Ground Motionsd_panouNo ratings yet
- Investigation Into The Prediction of Sliding Block Displacements in Seismic Analysis of Earth DamsDocument15 pagesInvestigation Into The Prediction of Sliding Block Displacements in Seismic Analysis of Earth DamsReemaz HammadNo ratings yet
- Remotesensing 12 01632Document10 pagesRemotesensing 12 01632Jashley VillalbaNo ratings yet
- Ground Motion and Probabilistic Hazard: R. M. W. MussonDocument15 pagesGround Motion and Probabilistic Hazard: R. M. W. MussonIrawan TaniNo ratings yet
- Compatible Acceleration and Displacement Spectra For Seismic Design CodesDocument8 pagesCompatible Acceleration and Displacement Spectra For Seismic Design CodeskvvrajkumarNo ratings yet
- Hammer&Finlay GJI 2019Document34 pagesHammer&Finlay GJI 2019Cristiana StefanNo ratings yet
- Subject HeadingsDocument35 pagesSubject Headingsप्रियरंजन सिंह राजपूतNo ratings yet
- CWE Vol10 SPL (1) P 40-46Document7 pagesCWE Vol10 SPL (1) P 40-46naimulceNo ratings yet
- Interferometric Synthetic Aperture Radar - Wikipedia, The Free EncyclopediaDocument9 pagesInterferometric Synthetic Aperture Radar - Wikipedia, The Free EncyclopediakowsilaxNo ratings yet
- Fractured Reservoir Characterization From Seismic Azimuthal Anisotropy and Well Log AnalysisDocument4 pagesFractured Reservoir Characterization From Seismic Azimuthal Anisotropy and Well Log AnalysisSatriaNo ratings yet
- Seismic Ray Theory and Inverse MethodsDocument6 pagesSeismic Ray Theory and Inverse Methodsada_dech1975No ratings yet
- Directional Guided Seismic Attributes and Their Use in Assisting Structural, Stratigraphic and Lithological InterpretationDocument5 pagesDirectional Guided Seismic Attributes and Their Use in Assisting Structural, Stratigraphic and Lithological InterpretationGermancito CubaNo ratings yet
- Introduction To Engineering Seismology: KeywordsDocument34 pagesIntroduction To Engineering Seismology: Keywordsbiles1234No ratings yet
- Seismic Risk Evaluation Method of Structures Based On Deaggregation of Seismic HazardDocument9 pagesSeismic Risk Evaluation Method of Structures Based On Deaggregation of Seismic HazardMimicry TarnNo ratings yet
- 6.0 Estimation of Uniform Hazard Spectra On SoilDocument143 pages6.0 Estimation of Uniform Hazard Spectra On Soilbetz3JessNo ratings yet
- Simulated VLBI Images From Relativistic Hydrodynamic Jet ModelsDocument27 pagesSimulated VLBI Images From Relativistic Hydrodynamic Jet ModelsCélio LimaNo ratings yet
- Modeling Solar Radiation at Landscape ScalesDocument33 pagesModeling Solar Radiation at Landscape ScalesBharat TerangNo ratings yet
- Suppressing The Contribution of Intrinsic Galaxy Alignments To The Shear Two-Point Correlation FunctionDocument17 pagesSuppressing The Contribution of Intrinsic Galaxy Alignments To The Shear Two-Point Correlation FunctionEntropyPrincipleNo ratings yet
- Damping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsDocument24 pagesDamping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsPatricio ChicaizaNo ratings yet
- Rupture Aspect Ratio Effect For Probabilistic Seismic Hazard Analysis Using OpenquakeDocument6 pagesRupture Aspect Ratio Effect For Probabilistic Seismic Hazard Analysis Using OpenquakeMafer ReyesNo ratings yet
- 10 1016@j Isprsjprs 2015 10 003Document13 pages10 1016@j Isprsjprs 2015 10 003RenzoNo ratings yet
- Ionospheric Threats To Space-Based Augmentation System DevelopmentDocument10 pagesIonospheric Threats To Space-Based Augmentation System DevelopmentMohith DNo ratings yet
- MCMC JointDocument36 pagesMCMC JointTeus DamNo ratings yet
- Measurement of Gravitational Spin-Orbit Coupling in A Binary Pulsar SystemDocument5 pagesMeasurement of Gravitational Spin-Orbit Coupling in A Binary Pulsar SystemMhd CarrollNo ratings yet
- 2008 06538 PDFDocument23 pages2008 06538 PDFHenry SalomonNo ratings yet
- Osandoval,+geof 63 Art2Document21 pagesOsandoval,+geof 63 Art2Manolo PuerchambuNo ratings yet
- 7 Extended Abstract KorneevDocument5 pages7 Extended Abstract KorneevAwad AlmalkiNo ratings yet
- Bray and Travasarou - 2007Document12 pagesBray and Travasarou - 2007WilliamSuarezNo ratings yet
- Douglas ESR 2003 Earthquake Ground Motion Estimation Using Strong MotionDocument167 pagesDouglas ESR 2003 Earthquake Ground Motion Estimation Using Strong MotionAlaaGaballaNo ratings yet
- Basic Seismology-Shearer (USGS)Document61 pagesBasic Seismology-Shearer (USGS)jcpchin2No ratings yet
- 2016 - Skarlatoudis - Source ScalingDocument11 pages2016 - Skarlatoudis - Source Scalingcjmentor1279No ratings yet
- 2002 Clark Surface Reflectance CalibrationDocument21 pages2002 Clark Surface Reflectance CalibrationAmarjargal DavaadorjNo ratings yet
- Relative Seismic Shaking Vulnerability MicrozonationDocument17 pagesRelative Seismic Shaking Vulnerability MicrozonationAugustato D'AravelaNo ratings yet
- Empirical Relationships Between Modified Mercalli and Response SpectraDocument8 pagesEmpirical Relationships Between Modified Mercalli and Response SpectraAugustato D'AravelaNo ratings yet
- Characteristics of Ground Motions Response Spectra From Recent Large EarthquakesDocument10 pagesCharacteristics of Ground Motions Response Spectra From Recent Large EarthquakesredpolNo ratings yet
- Soil Slopes Under Seismic AccelerationsDocument11 pagesSoil Slopes Under Seismic AccelerationsAugustato D'AravelaNo ratings yet
- Site-Specific Ground Response AnalysisDocument9 pagesSite-Specific Ground Response AnalysisAugustato D'AravelaNo ratings yet
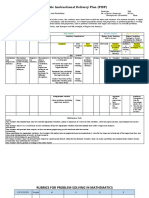
- Flexible Instructional Delivery Plan (FIDP) : What To Teach?Document3 pagesFlexible Instructional Delivery Plan (FIDP) : What To Teach?Arniel LlagasNo ratings yet
- Beyond The VIFDocument23 pagesBeyond The VIFAidenNo ratings yet
- S.id.C.8 Linear RegressionDocument11 pagesS.id.C.8 Linear RegressionSmita NagNo ratings yet
- Econometrics Problem SetDocument3 pagesEconometrics Problem SetLuisSanchezNo ratings yet
- Predicting Players RatingDocument4 pagesPredicting Players RatingsailushaNo ratings yet
- Pengaruh Budaya Organisasi Terhadap KineDocument14 pagesPengaruh Budaya Organisasi Terhadap KineDidik PrasetyaNo ratings yet
- Tirmizi - 2009 - An Empirical Study of Consumer Impulse Buying Behavior in Local MarketsDocument11 pagesTirmizi - 2009 - An Empirical Study of Consumer Impulse Buying Behavior in Local MarketsNelson PutraNo ratings yet
- Icma Centre University of Reading: Quantitative Methods For FinanceDocument3 pagesIcma Centre University of Reading: Quantitative Methods For FinanceAna-Maria BadeaNo ratings yet
- Relationships Between Dissatisfaction With Specific Body Characteristics and The Sociocultural Attitudes Toward ..Document7 pagesRelationships Between Dissatisfaction With Specific Body Characteristics and The Sociocultural Attitudes Toward ..Nathalie SluzekNo ratings yet
- Stice Et Al 2001Document19 pagesStice Et Al 2001ruxandaNo ratings yet
- STAT 3008 OutlineDocument4 pagesSTAT 3008 OutlineEmerald LamNo ratings yet
- Financial Literacy and Financial Well Being Among Generation Z University Students Evidence From GreeceDocument23 pagesFinancial Literacy and Financial Well Being Among Generation Z University Students Evidence From GreeceTiffany Joy MoloNo ratings yet
- SBST3203 Elementary Data Analysis AssignmentDocument4 pagesSBST3203 Elementary Data Analysis AssignmentFAEZAL HAZLY B. MOHD NAJIB STUDENTNo ratings yet
- ICAEBIS'2012 Advertising ImpactsDocument5 pagesICAEBIS'2012 Advertising ImpactsRizka Sarastri SumardionoNo ratings yet
- Foundations of Clinical Research Applications To Practice 3rd Edition Ebook PDFDocument62 pagesFoundations of Clinical Research Applications To Practice 3rd Edition Ebook PDFjames.napier555100% (43)
- Sbe9 TB16Document21 pagesSbe9 TB16Huong Tran50% (2)
- Insider Outsider TheoryDocument21 pagesInsider Outsider TheorysukandeNo ratings yet
- Analisis Permintaan Uang Kuasi Di IndonesiaDocument14 pagesAnalisis Permintaan Uang Kuasi Di IndonesiaSamsul AriNo ratings yet
- A Machine Learning Analysis of Stock Market Tick Data For Stock Price Trend PredictionDocument24 pagesA Machine Learning Analysis of Stock Market Tick Data For Stock Price Trend PredictionPrakash Pokhrel100% (1)
- Multiple Regression Model ExplainedDocument166 pagesMultiple Regression Model ExplainedRay Vega LugoNo ratings yet
- Application of 7s MethodologyDocument16 pagesApplication of 7s MethodologyIsmail EkmekciNo ratings yet
- Zhang 2021Document17 pagesZhang 2021Gus ArtoNo ratings yet
- CHP 5Document5 pagesCHP 5Adeeb Hassannoor0% (1)
- Time Series AnalysisDocument24 pagesTime Series Analysiskrater33No ratings yet
- Commerce Gen PassDocument49 pagesCommerce Gen PassBikash KumarNo ratings yet
- SNCS D 23 00531Document15 pagesSNCS D 23 00531Arwa Juma Al BusaidiNo ratings yet
- Homework 1 - Simple Linear Regression - Neal PaniaDocument4 pagesHomework 1 - Simple Linear Regression - Neal PaniaJohn SmithNo ratings yet
- Fake NewsDocument40 pagesFake NewsFrank WunderNo ratings yet
- Effectiveness of Talent Management Strategies: Pamela Bethke-Langenegger, Philippe Mahler and Bruno StaffelbachDocument16 pagesEffectiveness of Talent Management Strategies: Pamela Bethke-Langenegger, Philippe Mahler and Bruno StaffelbachFarzana Mahamud RiniNo ratings yet
- WSU Thesis Book Final Volume IDocument380 pagesWSU Thesis Book Final Volume IGEDYION GebreNo ratings yet