You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
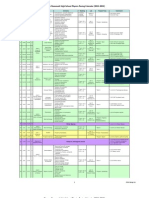
- Eleanor Roosevelt High School Robotics Engineering Design Pacing Calendar (2011-2012)Document2 pagesEleanor Roosevelt High School Robotics Engineering Design Pacing Calendar (2011-2012)api-96240693No ratings yet
- Physics Lab Safety Guidelines and Procedures Lab Safety GuidelinesDocument1 pagePhysics Lab Safety Guidelines and Procedures Lab Safety Guidelinesapi-96240693No ratings yet
- Eleanor Roosevelt High School Robotics Engineering Design Pacing Calendar (2011-2012)Document2 pagesEleanor Roosevelt High School Robotics Engineering Design Pacing Calendar (2011-2012)api-96240693No ratings yet
- Robotics Lab Safety Guidelines General Lab Safety Rules:: Chin - Sung Lin 1Document1 pageRobotics Lab Safety Guidelines General Lab Safety Rules:: Chin - Sung Lin 1api-96240693No ratings yet
- UntitledDocument2 pagesUntitledapi-96240693No ratings yet
- Guidelines Are Posted Online at Our Class Website:: Physics Return SlipDocument1 pageGuidelines Are Posted Online at Our Class Website:: Physics Return Slipapi-96240693No ratings yet
- Guidelines Are Posted Online at Our Class Website:: Robotics Return SlipDocument1 pageGuidelines Are Posted Online at Our Class Website:: Robotics Return Slipapi-96240693No ratings yet
- Geometry Return Slip: Chin-Sung LinDocument1 pageGeometry Return Slip: Chin-Sung Linapi-96240693No ratings yet
- UntitledDocument2 pagesUntitledapi-96240693No ratings yet
- Physics (SPA) & Physics Lab (SPAL) Syllabus: InstructorDocument3 pagesPhysics (SPA) & Physics Lab (SPAL) Syllabus: Instructorapi-96240693No ratings yet
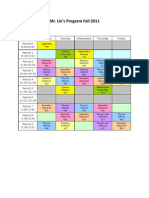
- Mr. Lin's Program Fall 2011Document1 pageMr. Lin's Program Fall 2011api-96240693No ratings yet
- Geometry (MG13) Syllabus: InstructorDocument3 pagesGeometry (MG13) Syllabus: Instructorapi-96240693No ratings yet
- Geometry (MG13) Syllabus: InstructorDocument3 pagesGeometry (MG13) Syllabus: Instructorapi-96240693No ratings yet
- Geometry (MG13) Syllabus: InstructorDocument3 pagesGeometry (MG13) Syllabus: Instructorapi-96240693No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mathematics Year Three Daily Plan 10 MARCH 2011: Time Allocation Activity Learning Outcomes NotesDocument5 pagesMathematics Year Three Daily Plan 10 MARCH 2011: Time Allocation Activity Learning Outcomes NotesFaziLa Che HassanNo ratings yet
- Asas Pembudayaan Keusahawanan 2018Document2 pagesAsas Pembudayaan Keusahawanan 2018Jeremy Wesley Hawing MilangNo ratings yet
- Vocabulary Improvement Through Task-Based LearningDocument15 pagesVocabulary Improvement Through Task-Based LearningĐào Nguyễn Duy TùngNo ratings yet
- Fundamentals of Machine Learning For Predictive Data AnalyticsDocument52 pagesFundamentals of Machine Learning For Predictive Data AnalyticsMba NaniNo ratings yet
- Makalah Teaching of ListeningDocument5 pagesMakalah Teaching of ListeningZhity KhadijahNo ratings yet
- Professional practice pathways for remote teaching: Planning lessons and coursesDocument2 pagesProfessional practice pathways for remote teaching: Planning lessons and coursesInna BulatovaNo ratings yet
- INGLIS. L 64067 English Home Language Assignment 2Document21 pagesINGLIS. L 64067 English Home Language Assignment 2Irene GangatNo ratings yet
- Walk Through Grade 11 - CG - TVLDocument40 pagesWalk Through Grade 11 - CG - TVLKrist LaxaNo ratings yet
- Tecnology Humanities PDFDocument57 pagesTecnology Humanities PDFMaya ErnieNo ratings yet
- The Behaviourist Orientation To LearningDocument12 pagesThe Behaviourist Orientation To Learningpecuconture67% (3)
- Quality Criteria for Evaluating Transdisciplinary ResearchDocument78 pagesQuality Criteria for Evaluating Transdisciplinary Researchis03lcmNo ratings yet
- Gestalt's Learning Theory-PsychologyDocument40 pagesGestalt's Learning Theory-Psychologymarviv liamskiNo ratings yet
- Improving Students' Listening Skill and Vocabulary Mastery Through Contextual Teaching and LearningDocument12 pagesImproving Students' Listening Skill and Vocabulary Mastery Through Contextual Teaching and LearningJennet SenawatiNo ratings yet
- Tiffani Lind ResumeDocument5 pagesTiffani Lind Resumeapi-315220525No ratings yet
- Syllabus in EDD 720 Educational Innovation and Technology by Doc JesyDocument7 pagesSyllabus in EDD 720 Educational Innovation and Technology by Doc Jesykharl100% (2)
- Major Functions of SupervisionDocument17 pagesMajor Functions of SupervisionEdelle BaritNo ratings yet
- Rpms Cot Indicator - Docx Version 1Document2 pagesRpms Cot Indicator - Docx Version 1Sharie Arellano100% (1)
- The Importance of Active LearningDocument2 pagesThe Importance of Active LearningYoo ChenchenNo ratings yet
- Interlanguage: Brought To You by - University of California Authenticated Download Date - 11/17/14 9:12 PMDocument24 pagesInterlanguage: Brought To You by - University of California Authenticated Download Date - 11/17/14 9:12 PMenviNo ratings yet
- K 12 Instructional Materials in The PhilippinesDocument4 pagesK 12 Instructional Materials in The PhilippinesTrending UpdatesNo ratings yet
- Lesson 2 - Tools in Evaluating Appropriate Assessment ToolsDocument12 pagesLesson 2 - Tools in Evaluating Appropriate Assessment Toolsjennifer cruz100% (2)
- Literature Review On Ict in EducationDocument8 pagesLiterature Review On Ict in Educationwzsatbcnd100% (1)
- DLP Lesson Plan 2nd DOSTDocument5 pagesDLP Lesson Plan 2nd DOSTLester Gene Villegas ArevaloNo ratings yet
- Psychosocial Care in Disasters ToT NIDMDocument162 pagesPsychosocial Care in Disasters ToT NIDMVaishnavi JayakumarNo ratings yet
- Teaching Beginning Reading - Filipino - English - The Four Pronged ApproachDocument132 pagesTeaching Beginning Reading - Filipino - English - The Four Pronged ApproachI'm SaiQty?No ratings yet
- 28 Expressing RatioDocument7 pages28 Expressing RatioMark IbañezNo ratings yet
- Gym - Ocean RescueDocument2 pagesGym - Ocean Rescueapi-267119096No ratings yet
- Pdhpe HSC SyllabusDocument30 pagesPdhpe HSC Syllabusbwallace1997No ratings yet
- A Scikit-Learn Compatible Learning Classifier SystemDocument8 pagesA Scikit-Learn Compatible Learning Classifier SystemLucas PalmeiraNo ratings yet
- SC 5Document2 pagesSC 5api-208811231No ratings yet