You might also like
- SAES-R-004 Sanitary SewersDocument27 pagesSAES-R-004 Sanitary SewersWaqar AhmedNo ratings yet
- Instrumentation and ControlDocument369 pagesInstrumentation and Controlsolo66No ratings yet
- Process control modes and tuning methodsDocument23 pagesProcess control modes and tuning methodsMuhammad Ibad AlamNo ratings yet
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Cylinder Cutout Cylinder CutoutDocument12 pagesCylinder Cutout Cylinder CutoutIsrael Miranda ZamarcaNo ratings yet
- Hajar Trading and Technical Services: Risk AssessmentDocument10 pagesHajar Trading and Technical Services: Risk Assessmentwinston11No ratings yet
- Design & Simulation of Electro-Pneumatic System Using PLC Automation StudioDocument54 pagesDesign & Simulation of Electro-Pneumatic System Using PLC Automation StudiomikostovNo ratings yet
- Cwi QuestionsDocument6 pagesCwi QuestionsGokul Thangam75% (4)
- Lab Report PDC Gas PressureDocument9 pagesLab Report PDC Gas PressureHaziq AzliNo ratings yet
- British Petroleum Terms and ConditionDocument4 pagesBritish Petroleum Terms and Conditionkarthikeyan mpNo ratings yet
- Easy Genset Control: OperationDocument51 pagesEasy Genset Control: OperationdonothearNo ratings yet
- Two Marks Questions and AnswersDocument5 pagesTwo Marks Questions and Answerssudhasesh2000No ratings yet
- Mantrac Egypt ProfileDocument9 pagesMantrac Egypt ProfilenabilredascribdNo ratings yet
- Air Pressure Control Via Sliding Mode Approach Using An On/off Solenoid ValveDocument5 pagesAir Pressure Control Via Sliding Mode Approach Using An On/off Solenoid ValveMuhammad RidwanNo ratings yet
- Positioning System with Proportional Pressure RegulatorsDocument6 pagesPositioning System with Proportional Pressure RegulatorsFawaz PartoNo ratings yet
- Actuators: Position Control of Pneumatic Actuators Using Three-Mode Discrete-Valued Model Predictive ControlDocument15 pagesActuators: Position Control of Pneumatic Actuators Using Three-Mode Discrete-Valued Model Predictive Controlsakthiya ramNo ratings yet
- A Generalized Predictive Force Controller For Electropneumatic CylindersDocument6 pagesA Generalized Predictive Force Controller For Electropneumatic CylindersEngr Nayyer Nayyab MalikNo ratings yet
- Research Article: Force Control For A Pneumatic Cylinder Using Generalized Predictive Controller ApproachDocument6 pagesResearch Article: Force Control For A Pneumatic Cylinder Using Generalized Predictive Controller ApproachShubham KaushikNo ratings yet
- Backstepping Control of Wind TunnelDocument10 pagesBackstepping Control of Wind TunnellamuelNo ratings yet
- Applsci 08 00406 v4Document22 pagesApplsci 08 00406 v4Handy Surya WicaksonoNo ratings yet
- AIM09 0228pneumaticDocument6 pagesAIM09 0228pneumaticpolat035No ratings yet
- 1997 IGTI CompressorTipClearanceDocument8 pages1997 IGTI CompressorTipClearancepportilhoNo ratings yet
- Pressure Observer-Controller Design For Pneumatic Cylinder ActuatorsDocument10 pagesPressure Observer-Controller Design For Pneumatic Cylinder ActuatorsSähilDhånkhårNo ratings yet
- Rotary PendulummDocument17 pagesRotary PendulummTrần Kế HưngNo ratings yet
- Design & Simulation of Electro-Pneumatic SystemDocument54 pagesDesign & Simulation of Electro-Pneumatic SystemSaravanan Mathi0% (2)
- Mechatronics Automation CH 2Document79 pagesMechatronics Automation CH 2Zeyad AymanNo ratings yet
- Actuator DesignDocument7 pagesActuator DesignAnkit KumarNo ratings yet
- Paper 207578Document13 pagesPaper 207578inty vacaNo ratings yet
- An Aeroload SimulatorDocument71 pagesAn Aeroload SimulatorNikunj AgarwalNo ratings yet
- PLC Automation of Steam TurbineDocument5 pagesPLC Automation of Steam TurbineWinarsita Gilang100% (1)
- Neural Network Optimizes Pneumatic Position ControlDocument9 pagesNeural Network Optimizes Pneumatic Position ControlAri NugrohoNo ratings yet
- Process Reaction CurveDocument6 pagesProcess Reaction Curveindra100% (1)
- Automatic On-Line Estimation of Backlash in Control Loops Tore Hugland PDFDocument11 pagesAutomatic On-Line Estimation of Backlash in Control Loops Tore Hugland PDFGino PascualliNo ratings yet
- Adaptive Smith Predictor PI Controller Improves HVAC System Temperature ControlDocument9 pagesAdaptive Smith Predictor PI Controller Improves HVAC System Temperature Controlmatm333No ratings yet
- Injection Molding Process ControlDocument11 pagesInjection Molding Process ControlTrung Kiên LêNo ratings yet
- PID Temperature ControlDocument5 pagesPID Temperature ControlMark Anthony CaroNo ratings yet
- Analog Control LaboratoryDocument7 pagesAnalog Control LaboratoryAshik AhmedNo ratings yet
- A Fuzzy Control Algorithm For Collecting Main Pressure Controlling Using Expert ControlDocument4 pagesA Fuzzy Control Algorithm For Collecting Main Pressure Controlling Using Expert Control尤俊偉No ratings yet
- Important On SdarticleDocument15 pagesImportant On Sdarticleveeresh1000No ratings yet
- 74e48d8b7b4ed69 Ek ControleDocument5 pages74e48d8b7b4ed69 Ek ControleDiogo CoelhoNo ratings yet
- Nonlinear Control of Variable Speed Wind TurbinesDocument7 pagesNonlinear Control of Variable Speed Wind TurbinesSoumya RanjanNo ratings yet
- Intro Theory Level FlowDocument5 pagesIntro Theory Level FlowAzura BahrudinNo ratings yet
- Design and Implementation of Automatic Air Flow Rate Control SystemDocument6 pagesDesign and Implementation of Automatic Air Flow Rate Control Systemresy fauziahNo ratings yet
- Motion Control of An Aircraft Electro-Hydraulic SeDocument12 pagesMotion Control of An Aircraft Electro-Hydraulic SeZyad KaramNo ratings yet
- Some Aspects of Numerical Simulation of Control Valves For Steam TurbinesDocument1 pageSome Aspects of Numerical Simulation of Control Valves For Steam TurbinesSharat ChandraNo ratings yet
- Model Predictive Control of An Inverted Pendulum, MPCDocument4 pagesModel Predictive Control of An Inverted Pendulum, MPCerdsan100% (1)
- Temperature Optimization of A Naphtha Splitter UnitDocument10 pagesTemperature Optimization of A Naphtha Splitter UnitSalma TajNo ratings yet
- Dynamic Analysis of Proportional Solenoid Controlled Piloted Relief Valve by BondgraphDocument18 pagesDynamic Analysis of Proportional Solenoid Controlled Piloted Relief Valve by BondgraphmilligatorNo ratings yet
- Wind Turbine Control Using PI Pitch Angle Controller: Abdulhamed Hwas and Reza KatebiDocument6 pagesWind Turbine Control Using PI Pitch Angle Controller: Abdulhamed Hwas and Reza Katebisatyajit250No ratings yet
- Dynamic Simulation of Heat Transfer Through Cooling TowerDocument5 pagesDynamic Simulation of Heat Transfer Through Cooling TowerAparnaNo ratings yet
- Applied Thermal Engineering: Shiyang Li, Peng Wu, Linlin Cao, Dazhuan Wu, Yantao SheDocument10 pagesApplied Thermal Engineering: Shiyang Li, Peng Wu, Linlin Cao, Dazhuan Wu, Yantao Sheruikar manojNo ratings yet
- Lecture 1 & 2 - 2Document37 pagesLecture 1 & 2 - 2Awais0040% (1)
- Comparison of Control Strategies For Aircraft Bleed-Air SystemsDocument6 pagesComparison of Control Strategies For Aircraft Bleed-Air SystemsmyskyshepherdNo ratings yet
- State Space Model Predictive Control of An Aerothermic Process With Actuators ConstraintsDocument9 pagesState Space Model Predictive Control of An Aerothermic Process With Actuators ConstraintsSamantha BrownNo ratings yet
- Process Control TrainerDocument3 pagesProcess Control TrainerSufyan AzamNo ratings yet
- Low Cost AutomationDocument88 pagesLow Cost AutomationvijisathishNo ratings yet
- Valtek Beta Positioners: For Control ValvesDocument8 pagesValtek Beta Positioners: For Control Valvesابزار دقیقNo ratings yet
- Control Theory - WikipediaDocument15 pagesControl Theory - WikipediaDAVID MURILLONo ratings yet
- Ihp Unit 6: Pneumatic CircuitsDocument35 pagesIhp Unit 6: Pneumatic CircuitsAkash MarkhaleNo ratings yet
- Pci Lab Manual (2) StudentDocument67 pagesPci Lab Manual (2) StudentTewodros AsfawNo ratings yet
- Turbogenerator Self-Tuning Automatic Voltage RegulatorDocument6 pagesTurbogenerator Self-Tuning Automatic Voltage Regulatoranupam789No ratings yet
- Predictive Control of A Solar Air Conditioning Plant With Simultaneous IdentificationDocument6 pagesPredictive Control of A Solar Air Conditioning Plant With Simultaneous IdentificationSachin GaikwadNo ratings yet
- Guidelines For Online ApplicationDocument26 pagesGuidelines For Online ApplicationAnonymous Xf4w0D2cNo ratings yet
- Self-Tuning PID Fuzzy Controller Simulates HVAC SystemDocument7 pagesSelf-Tuning PID Fuzzy Controller Simulates HVAC SystemwendyNo ratings yet
- Reduced OrderDocument15 pagesReduced OrderNguyễn TrungNo ratings yet
- Laftah/15/ Azeez (HusseinDocument17 pagesLaftah/15/ Azeez (HusseinHadi. MNo ratings yet
- KeynoteDocument3 pagesKeynotekarthikeyan mpNo ratings yet
- Conjoint AnalysisDocument27 pagesConjoint AnalysisPrasang JaisNo ratings yet
- Mechanical Engineering Division Council (Med) SR. No. CAT DescriptionDocument4 pagesMechanical Engineering Division Council (Med) SR. No. CAT Descriptionirshad1234No ratings yet
- Motor (ABB Type)Document50 pagesMotor (ABB Type)Rolando Nunez del Prado B.No ratings yet
- Every Emergency.: C Safe Marine Generator SetsDocument4 pagesEvery Emergency.: C Safe Marine Generator SetsBrillyanNo ratings yet
- QT-002!02!50 HZ Lister Peter - Aksa - Mitsubishi - John Deere - Perkins Engine-Alternator Couple Table 2015.02.16Document1 pageQT-002!02!50 HZ Lister Peter - Aksa - Mitsubishi - John Deere - Perkins Engine-Alternator Couple Table 2015.02.16Cris_eu09No ratings yet
- TSP-408L-1 P/N 32441-002: ApplicationDocument2 pagesTSP-408L-1 P/N 32441-002: ApplicationSajjad ShamimNo ratings yet
- APFC Epcos 6Document8 pagesAPFC Epcos 6Sriman ChinnaduraiNo ratings yet
- Production Range: EUROPIPE. The World Trusts UsDocument8 pagesProduction Range: EUROPIPE. The World Trusts UsIslam-Lotfi Hadj-ArabNo ratings yet
- Technical Assistance Consultant's Report: Energy Storage Option For Accelerating Renewable Energy PenetrationDocument364 pagesTechnical Assistance Consultant's Report: Energy Storage Option For Accelerating Renewable Energy PenetrationAlezsander RguezArNo ratings yet
- New Tutorial 2 Solution On ThermodynamicsDocument7 pagesNew Tutorial 2 Solution On ThermodynamicsNaveed AhmadNo ratings yet
- Sany HBT8018C-5S (T3) Trailer Pump - 004118Document2 pagesSany HBT8018C-5S (T3) Trailer Pump - 004118اهى عيشه وبن عشها just a lifeNo ratings yet
- YM80SA Abrasive Belt Polishing Machine-Operation ManualDocument7 pagesYM80SA Abrasive Belt Polishing Machine-Operation ManualAgha Ali KhanNo ratings yet
- Chemical Reactions: Physical Vs Chemical ChangesDocument7 pagesChemical Reactions: Physical Vs Chemical ChangesIfra HassanNo ratings yet
- Table 4E4A - Current Carrying Capacity in AmpereDocument1 pageTable 4E4A - Current Carrying Capacity in AmperesalvuNo ratings yet
- EE 004A DC and AC Machinery ExperimentDocument9 pagesEE 004A DC and AC Machinery ExperimentJerome NuevoNo ratings yet
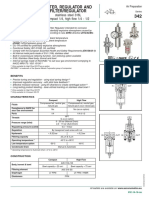
- Numatics Series 342Document6 pagesNumatics Series 342Jebran FarazNo ratings yet
- Thermal Shock Resistant Neoceram Glass-CeramicDocument2 pagesThermal Shock Resistant Neoceram Glass-CeramicAmândio PintoNo ratings yet
- 2007 Bachu Etal CO2 Storage Capacity EstimationDocument14 pages2007 Bachu Etal CO2 Storage Capacity EstimationArindam Obzi GuptaNo ratings yet
- Halogen Linear - 76534 - Tu k12 c100w 240v r7s 78mm Ge tbl1 10mih - 0 - EmeaDocument3 pagesHalogen Linear - 76534 - Tu k12 c100w 240v r7s 78mm Ge tbl1 10mih - 0 - EmeaMarcos AfonsoNo ratings yet
- Turbocharged Engines PDFDocument72 pagesTurbocharged Engines PDFVeler VelericNo ratings yet
- Esite Bauer Poseidon Edition VE 300 850 Hengitysilmakompressori enDocument4 pagesEsite Bauer Poseidon Edition VE 300 850 Hengitysilmakompressori enrolandoNo ratings yet
- Dual Nature of Radiation and MatterDocument6 pagesDual Nature of Radiation and Mattersub100% (1)
- Solar Refrigerator SpecsDocument4 pagesSolar Refrigerator SpecsFaisal Bin FaheemNo ratings yet
- MPU 2201 Online HGNotes - 1 ACADEMIC ESSAYDocument19 pagesMPU 2201 Online HGNotes - 1 ACADEMIC ESSAYtharaaNo ratings yet
- ME6502 Heat and Mass Transfer SyllabusDocument26 pagesME6502 Heat and Mass Transfer Syllabusamdeva0% (1)
- Hydrographic SurveyDocument24 pagesHydrographic SurveyKamal Veer100% (1)