You might also like
- Heat Transfer Lab ManualDocument74 pagesHeat Transfer Lab ManualPatel HarshNo ratings yet
- Combustion Stages in SI EnginesDocument16 pagesCombustion Stages in SI EnginesPatel HarshNo ratings yet
- HMT Lab 2Document36 pagesHMT Lab 2Rahul TripathiNo ratings yet
- NCERT Book - Contemporary India Part I - Class IXDocument63 pagesNCERT Book - Contemporary India Part I - Class IXnikhilam.com100% (4)
- NCERT Sci 9Document219 pagesNCERT Sci 9devagandivaNo ratings yet
- Et Question PaperDocument3 pagesEt Question PaperPatel HarshNo ratings yet
- Combustion in CI EngineDocument32 pagesCombustion in CI EnginePatel HarshNo ratings yet
- NCERT Book - Contemporary India Part I - Class IXDocument63 pagesNCERT Book - Contemporary India Part I - Class IXnikhilam.com100% (4)
- Gtu - Ac.in Syllabus SchemeSubjectCode ME ME Sub Code Sem-1Document2 pagesGtu - Ac.in Syllabus SchemeSubjectCode ME ME Sub Code Sem-1Patel HarshNo ratings yet
- Mechanical Engg UpscDocument44 pagesMechanical Engg UpscManikandan VijayanNo ratings yet
- NCERT Book - India and Contemporary World Part I - Class IXDocument179 pagesNCERT Book - India and Contemporary World Part I - Class IXnikhilam.com88% (8)
- New Pattern Prelims 2011 PaperDocument48 pagesNew Pattern Prelims 2011 Papershilpa_2405No ratings yet
- GATE Mechanical 2009Document13 pagesGATE Mechanical 2009nihalsaketNo ratings yet
- EconomicsDocument55 pagesEconomicsPatel HarshNo ratings yet
- Mechanical Gate Paper ADocument16 pagesMechanical Gate Paper AAbhilash G NairNo ratings yet
- 3.4 HvacDocument8 pages3.4 HvacShehryar01No ratings yet
- GeographyDocument77 pagesGeographyPatel HarshNo ratings yet
- Me Thermal SyllbusDocument20 pagesMe Thermal Syllbusxyzscribd1988No ratings yet
- Tut 11Document30 pagesTut 11rajeshps07No ratings yet
- Indian ConstitutionDocument120 pagesIndian ConstitutionNilabh KumarNo ratings yet
- Steam Turbine Buy OnkarDocument965 pagesSteam Turbine Buy OnkarSandip Kumar100% (5)
- Verbal Skills EnglishDocument10 pagesVerbal Skills EnglishheloverNo ratings yet
- Wf5 TutorialDocument91 pagesWf5 Tutorialwierd101100% (1)
- 1Document15 pages1Patel HarshNo ratings yet
- En Study Trigeneration in IndiaDocument106 pagesEn Study Trigeneration in IndiaPatel HarshNo ratings yet
- Introduction To Heat TransferDocument15 pagesIntroduction To Heat TransferPatel HarshNo ratings yet
- Wf5 TutorialDocument91 pagesWf5 Tutorialwierd101100% (1)
- MTech Results Semester 1 Thermal Design 2012Document2 pagesMTech Results Semester 1 Thermal Design 2012Patel HarshNo ratings yet
- M.Tech Admission Guide for Mechanical Engineering DepartmentDocument15 pagesM.Tech Admission Guide for Mechanical Engineering DepartmentPatel HarshNo ratings yet
- All SelDocument5 pagesAll SelPatel HarshNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- AE LAB - Experiment No.2-1Document4 pagesAE LAB - Experiment No.2-1Prajwal PatilNo ratings yet
- PhysicsDocument13 pagesPhysicsNeha SinhaNo ratings yet
- 2.4.3 Dry LabDocument5 pages2.4.3 Dry LabYoon Yoon70% (10)
- Chapter 5 Energy WorkDocument103 pagesChapter 5 Energy WorkunoNo ratings yet
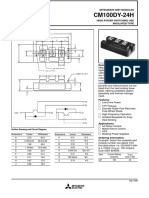
- Cm100dy 24hDocument4 pagesCm100dy 24hJulianoLuterek100% (1)
- IEE tutorial workshop on Earthing & Bonding techniquesDocument51 pagesIEE tutorial workshop on Earthing & Bonding techniquestgkenny873491% (35)
- Chapter 4-Force VibrationDocument30 pagesChapter 4-Force VibrationAyub Abd RahmanNo ratings yet
- Exam MEP1553 Apr2010Document7 pagesExam MEP1553 Apr2010Abid JamaliNo ratings yet
- Physics Bowl PB - 1994Document13 pagesPhysics Bowl PB - 1994James SuNo ratings yet
- Civil Engineering Mechanics CVG2149: Conservation of Angular MomentumDocument12 pagesCivil Engineering Mechanics CVG2149: Conservation of Angular MomentumKaiss Nael OsmanNo ratings yet
- Ch4 3-Phase Full-Wave AC Voltage ControllersDocument28 pagesCh4 3-Phase Full-Wave AC Voltage Controllerssmithprajapati.el21No ratings yet
- MDF11N65BDocument6 pagesMDF11N65BElec FoNo ratings yet
- DISTILLATION OPTIMIZATIONDocument57 pagesDISTILLATION OPTIMIZATIONbakhtyar21No ratings yet
- Display Devices LuminescenceDocument18 pagesDisplay Devices LuminescenceKush SharmaNo ratings yet
- Physics Pre-Board I 2022-23Document6 pagesPhysics Pre-Board I 2022-23Ayushi KayalNo ratings yet
- 11 02 2012 Xii Abcd Part Test IIIssssssssssssssssssssssDocument13 pages11 02 2012 Xii Abcd Part Test IIIssssssssssssssssssssssvishal1100850% (1)
- Switchgear and Protective DevicesDocument17 pagesSwitchgear and Protective DevicesAnonymous 5O6HavcVNo ratings yet
- Science 9 Worksheet Week 4Document4 pagesScience 9 Worksheet Week 4Jaybie TejadaNo ratings yet
- RouletteDocument19 pagesRouletteCypher NetNo ratings yet
- Aegis Bearing Protection Edition3 PDFDocument56 pagesAegis Bearing Protection Edition3 PDFZine ModelsNo ratings yet
- Degradation of Polymeric Power Cable Due To Water Treeing Under AC and DC StressDocument6 pagesDegradation of Polymeric Power Cable Due To Water Treeing Under AC and DC StressGualadrakeNo ratings yet
- PDC Lab ReportDocument13 pagesPDC Lab Reportarslan_uetanNo ratings yet
- Research ProposalDocument5 pagesResearch Proposalapi-610541637No ratings yet
- Generalized Matrix Method For The Design and Analysis of Vibration-Isolation SystemsDocument10 pagesGeneralized Matrix Method For The Design and Analysis of Vibration-Isolation SystemsJessica VieiraNo ratings yet
- Siemens Sicat SR Pi enDocument12 pagesSiemens Sicat SR Pi enIsrael SotoNo ratings yet
- Im Trox Compact Controller EasyDocument8 pagesIm Trox Compact Controller EasymichelesmiderleNo ratings yet
- 1C 500 MM (2xy) 0.6 1.0 (1.2) KV CABLESDocument2 pages1C 500 MM (2xy) 0.6 1.0 (1.2) KV CABLESanamulk-1No ratings yet
- KOFADocument12 pagesKOFAIrfan AshrafNo ratings yet
- Lab Techniques Experiment 1Document2 pagesLab Techniques Experiment 1Jayson RiveraNo ratings yet
- BJT Amplifier SimulationDocument11 pagesBJT Amplifier SimulationNiko de LemosNo ratings yet