You might also like
- Introduction To MechatronicsDocument31 pagesIntroduction To MechatronicsSudheer KumarNo ratings yet
- MatLAB SimPowerSystems for Modelling and SimulationDocument10 pagesMatLAB SimPowerSystems for Modelling and SimulationSemih Cem İlikNo ratings yet
- Aa 02 Short-Circuit Iec StandardDocument58 pagesAa 02 Short-Circuit Iec StandardSupriyanto SuhonoNo ratings yet
- LCS - 2Document21 pagesLCS - 2manamana4141No ratings yet
- CTS UserManual20May2022Document8 pagesCTS UserManual20May2022Zaenal Nur ArifinNo ratings yet
- The Nordic Test System For Voltage Stability Assessment: Thierry Van CutsemDocument28 pagesThe Nordic Test System For Voltage Stability Assessment: Thierry Van CutsemphieuxuatkhoNo ratings yet
- David Stoops 2Document15 pagesDavid Stoops 2Eng Jye NgNo ratings yet
- L&T Fast Bus Transfer SystemDocument15 pagesL&T Fast Bus Transfer SystemDevi Prasad100% (1)
- Design A Protection System of 220-33 KV Ramah Grid StationDocument51 pagesDesign A Protection System of 220-33 KV Ramah Grid StationAnand Kumar100% (2)
- Cuk Control PDFDocument57 pagesCuk Control PDFPraveen PJNo ratings yet
- Markov 123Document108 pagesMarkov 123rafeshNo ratings yet
- Lecture 1 Non Linear ControlDocument21 pagesLecture 1 Non Linear ControlShivan BiradarNo ratings yet
- Homework #2: Universidad Popular Del CesarDocument3 pagesHomework #2: Universidad Popular Del Cesarstalin roblesNo ratings yet
- Session-03 - ECN-341 - Yawalkar Ajinkya GanpatiDocument3 pagesSession-03 - ECN-341 - Yawalkar Ajinkya GanpatiAjinkya YawalkarNo ratings yet
- SimMod- Why,Types,Components,Example QueueDocument36 pagesSimMod- Why,Types,Components,Example QueueRia SinghNo ratings yet
- Modeling and Simulation Lecture 1 IntroductionDocument14 pagesModeling and Simulation Lecture 1 IntroductionhassenbbNo ratings yet
- 06 - Short Circuit - ANSI PDFDocument50 pages06 - Short Circuit - ANSI PDFÁlvaro Alarcón MolinaNo ratings yet
- Simulation and Modeling. Part 3Document11 pagesSimulation and Modeling. Part 3kaxapoNo ratings yet
- Chapter2 Multisim SimDocument29 pagesChapter2 Multisim SimChauthanh94No ratings yet
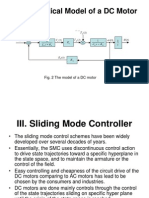
- Fig. 2 The Model of A DC MotorDocument10 pagesFig. 2 The Model of A DC MotorFatih SalihovicNo ratings yet
- Mimo 2-Sliding Control Design: A. LevantDocument6 pagesMimo 2-Sliding Control Design: A. Levantzeeshanbabar112No ratings yet
- Crossing The Synch AsynchDocument15 pagesCrossing The Synch AsynchsamdakNo ratings yet
- Short CircuitDocument154 pagesShort CircuitRichard VizcarraNo ratings yet
- State-Feedback Control Algorithms For A CNC Machine: Dora Sabau, Petru DobraDocument6 pagesState-Feedback Control Algorithms For A CNC Machine: Dora Sabau, Petru DobraRuyeri Alex Narro ReynaNo ratings yet
- Robust Computer Control An Inverted Pendulum: Medrano-CerdaDocument10 pagesRobust Computer Control An Inverted Pendulum: Medrano-CerdaVictor PassosNo ratings yet
- Jay H Lee - MPC Lecture NotesDocument137 pagesJay H Lee - MPC Lecture NotesVnomiksNo ratings yet
- Substation Off Line and Hot Line CommissioningDocument3 pagesSubstation Off Line and Hot Line CommissioningMohammad JawadNo ratings yet
- Relay NM 10Document8 pagesRelay NM 10Ayahnya Rizla Atha RayyanNo ratings yet
- Unit - 5: Protective RelayingDocument37 pagesUnit - 5: Protective RelayingREDAPPLE MEDIANo ratings yet
- Optimal Control of Three-Phase PWM Inverter For UPS Systems: Keyhani.1@osu - EduDocument6 pagesOptimal Control of Three-Phase PWM Inverter For UPS Systems: Keyhani.1@osu - EdursrtnjNo ratings yet
- Control Unit Explains Key FunctionsDocument14 pagesControl Unit Explains Key FunctionsmarahimruNo ratings yet
- Computer Modeling and Simulation of PWM Converter CircuitsDocument27 pagesComputer Modeling and Simulation of PWM Converter CircuitsskrtamilNo ratings yet
- Queuing Theory and Traffic Analysis InsightsDocument149 pagesQueuing Theory and Traffic Analysis InsightsSenthil SoundarajanNo ratings yet
- Digital Testing: Key Concepts of Scan-Path DesignDocument54 pagesDigital Testing: Key Concepts of Scan-Path DesignaguohaqdoNo ratings yet
- Emt DC PresentationDocument25 pagesEmt DC PresentationboopelectraNo ratings yet
- Discrete ControllersDocument26 pagesDiscrete ControllersBharat SahNo ratings yet
- Automated Robot (Line Tracer)Document13 pagesAutomated Robot (Line Tracer)akshay120No ratings yet
- Computer Modeling and Simulation of PWM Converter CircuitsDocument27 pagesComputer Modeling and Simulation of PWM Converter CircuitsAshok KumarNo ratings yet
- Lecture 5 Substation Automation SystemsDocument20 pagesLecture 5 Substation Automation Systemsemy1188No ratings yet
- PSG College of Technology: Department of Instrumentation and Control Systems EngineeringDocument14 pagesPSG College of Technology: Department of Instrumentation and Control Systems EngineeringAllanAnbuNo ratings yet
- Scan Path DesignDocument54 pagesScan Path DesignGowtham HariNo ratings yet
- MECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterDocument28 pagesMECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterOmar MalikNo ratings yet
- Computer Aided ProtectionDocument52 pagesComputer Aided ProtectionAdisu100% (3)
- Queuing TheoryDocument95 pagesQueuing TheorymohamagdyNo ratings yet
- Dreams Elmqvist Nov 2012Document39 pagesDreams Elmqvist Nov 2012Manuel OdendahlNo ratings yet
- Robot Specifications - Robot ProgrammingDocument54 pagesRobot Specifications - Robot ProgrammingPriyanshu NainNo ratings yet
- Transfer FunctionDocument8 pagesTransfer Functionadaptive4u4527No ratings yet
- Csu Dan SimonDocument36 pagesCsu Dan SimonUttam MNNo ratings yet
- PI Controller Design for DC MotorDocument4 pagesPI Controller Design for DC MotorsamielmadssiaNo ratings yet
- CST 05Document76 pagesCST 05Sourav ChoubeyNo ratings yet
- Fast Ac Electric Drive Development Process Using Simulink Code Generation PossibilitiesDocument9 pagesFast Ac Electric Drive Development Process Using Simulink Code Generation Possibilitiesmechernene_aek9037No ratings yet
- ch10 - ModifiedDocument125 pagesch10 - ModifiedYato SenkaiNo ratings yet
- On Sliding Mode Control For Nonlinear Electrical SDocument7 pagesOn Sliding Mode Control For Nonlinear Electrical SDany M.TNo ratings yet
- Implementation of Induction Motor Drive Control Schemes in MATLAB/Simulink/dSPACE Environment For Educational PurposeDocument23 pagesImplementation of Induction Motor Drive Control Schemes in MATLAB/Simulink/dSPACE Environment For Educational PurposeMos CraciunNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Earthing: Neutral Grounding SystemsDocument18 pagesEarthing: Neutral Grounding SystemsAbdallah Omar Al AyoubiNo ratings yet
- Code Electricity Transmission Rev 04Document198 pagesCode Electricity Transmission Rev 04Anonymous kjvaeVJNNo ratings yet
- Magnetism Exercise SheetDocument2 pagesMagnetism Exercise SheetAbdallah Omar Al AyoubiNo ratings yet
- Lesson13 HelicopterDocument12 pagesLesson13 HelicopterAbdallah Omar Al AyoubiNo ratings yet
- 05656730Document5 pages05656730Abdallah Omar Al AyoubiNo ratings yet
- IndexDocument105 pagesIndexAbdallah Omar Al AyoubiNo ratings yet
- Robust Attitude Control of Helicopters With Actuator Dynamics Using Neural NetworksDocument18 pagesRobust Attitude Control of Helicopters With Actuator Dynamics Using Neural NetworksAbdallah Omar Al AyoubiNo ratings yet
- ADDC Electricity Wiring Regulations - Mar.2014Document276 pagesADDC Electricity Wiring Regulations - Mar.2014hajimak89% (18)
- Lift and DragDocument18 pagesLift and DragAbdallah Omar Al AyoubiNo ratings yet
- Iuid SNT Sim Uit Integration v14Document32 pagesIuid SNT Sim Uit Integration v14Abdallah Omar Al AyoubiNo ratings yet
- 05008148Document5 pages05008148Abdallah Omar Al AyoubiNo ratings yet
- Design and Implementation of A Nonlinear Flight Control Law For The Yaw Channel of A UAV HelicopterDocument6 pagesDesign and Implementation of A Nonlinear Flight Control Law For The Yaw Channel of A UAV HelicopterAbdallah Omar Al AyoubiNo ratings yet
- IndexDocument105 pagesIndexAbdallah Omar Al AyoubiNo ratings yet
- 05656863Document4 pages05656863Abdallah Omar Al AyoubiNo ratings yet
- LicenseDocument1 pageLicenseAbdallah Omar Al AyoubiNo ratings yet
- 04103146Document8 pages04103146Abdallah Omar Al AyoubiNo ratings yet
- 00338466Document8 pages00338466Abdallah Omar Al AyoubiNo ratings yet
- 04421364Document6 pages04421364Abdallah Omar Al AyoubiNo ratings yet
- 01184895Document14 pages01184895Abdallah Omar Al AyoubiNo ratings yet
- 05461647Document16 pages05461647Abdallah Omar Al AyoubiNo ratings yet
- Robust Attitude Control of Helicopters With Actuator Dynamics Using Neural NetworksDocument18 pagesRobust Attitude Control of Helicopters With Actuator Dynamics Using Neural NetworksAbdallah Omar Al AyoubiNo ratings yet
- 05701672Document10 pages05701672Abdallah Omar Al AyoubiNo ratings yet
- 05164659Document6 pages05164659Abdallah Omar Al AyoubiNo ratings yet
- Estimation and Control Under Information Constraints For LAAS Helicopter BenchmarkDocument8 pagesEstimation and Control Under Information Constraints For LAAS Helicopter BenchmarkAbdallah Omar Al AyoubiNo ratings yet
- 2006 Ponencia Helicopter WseasDocument7 pages2006 Ponencia Helicopter WseasAbdallah Omar Al AyoubiNo ratings yet
- Helicopter Flight Control Design Using A Learning Control Approach1Document6 pagesHelicopter Flight Control Design Using A Learning Control Approach1Abdallah Omar Al AyoubiNo ratings yet
- 01397755Document7 pages01397755Abdallah Omar Al AyoubiNo ratings yet
- 01027093Document5 pages01027093Abdallah Omar Al AyoubiNo ratings yet
- 280 Fa4-3Document5 pages280 Fa4-3Abdallah Omar Al AyoubiNo ratings yet
- Turbo Codes and Principles and ApplicationsDocument37 pagesTurbo Codes and Principles and ApplicationsSree ANo ratings yet
- Theory Hw4Document5 pagesTheory Hw4Sami AlmasagediNo ratings yet
- Conversiones Binario, Octal, Decimal, HexadecimalDocument7 pagesConversiones Binario, Octal, Decimal, HexadecimalLinda MolanoNo ratings yet
- Chapter 1 Linear Programming 1.1 Transportation of CommoditiesDocument35 pagesChapter 1 Linear Programming 1.1 Transportation of CommoditiesRodas getahunNo ratings yet
- Floating point number representation and calculationsDocument29 pagesFloating point number representation and calculationsEdgardo LeysaNo ratings yet
- Parabola Equations General To Standard FormDocument4 pagesParabola Equations General To Standard Formrolly baloNo ratings yet
- Homework for Advanced Learning ModelsDocument10 pagesHomework for Advanced Learning ModelsPeđa PilipovićNo ratings yet
- Sigma Batch-2Document14 pagesSigma Batch-2ashurajpoot6387No ratings yet
- HumeraRafique - 2028 - 15200 - 2S19-EM4-4-Discrete TechniquesDocument16 pagesHumeraRafique - 2028 - 15200 - 2S19-EM4-4-Discrete TechniquesZeeshan RafiqNo ratings yet
- Insertion Sort (With Code in Python-C++-Java-C)Document11 pagesInsertion Sort (With Code in Python-C++-Java-C)Thee KullateeNo ratings yet
- Program - 1: AIM: Write A C Program To Implement Bit Stuffing DDocument3 pagesProgram - 1: AIM: Write A C Program To Implement Bit Stuffing DLavanya DietNo ratings yet
- Ranking in Swiss System Chess Team TournamentsDocument22 pagesRanking in Swiss System Chess Team TournamentsVergil S.YbañezNo ratings yet
- A23ah MFCS R15Document2 pagesA23ah MFCS R15J.vamshi KrishnaNo ratings yet
- Logic and Proofs FoundationsDocument51 pagesLogic and Proofs FoundationsBhuvanesh Kakarla AP21110010593No ratings yet
- Grammars, Recursively Enumerable Languages, and Turing MachinesDocument58 pagesGrammars, Recursively Enumerable Languages, and Turing Machinesraven_blake89100% (1)
- Prims Algorithm On MSTDocument22 pagesPrims Algorithm On MSTpremsk_09No ratings yet
- Java Collections Exercise SolutionsDocument5 pagesJava Collections Exercise SolutionsKamal WaliaNo ratings yet
- Spreadsheet Modeling & Decision Analysis:: A Practical Introduction To Management ScienceDocument29 pagesSpreadsheet Modeling & Decision Analysis:: A Practical Introduction To Management ScienceMethon BaskNo ratings yet
- DSAA Midterm Quiz 1Document34 pagesDSAA Midterm Quiz 1charles raffy talisaysayNo ratings yet
- The Foundations: Logic and ProofsDocument62 pagesThe Foundations: Logic and ProofsLuis Gabriel RiveraNo ratings yet
- NA Practice U7M17L03 AB TEDocument2 pagesNA Practice U7M17L03 AB TEAhmed SalemNo ratings yet
- HimanshuDocument6 pagesHimanshuDaksh MaradiyaNo ratings yet
- Properties of Linear Block CodesDocument17 pagesProperties of Linear Block CodesRohan JainNo ratings yet
- Notes On Gauss-Legendre QuadratureDocument5 pagesNotes On Gauss-Legendre QuadratureDENNIS KIBENo ratings yet
- Homework 2 Solutions - CS 61A Summer 2019 PDFDocument18 pagesHomework 2 Solutions - CS 61A Summer 2019 PDFzhen hu100% (1)
- Unit 1: Algorithm AnalysisDocument15 pagesUnit 1: Algorithm AnalysisMihikaNo ratings yet
- AVL Trees: Muralidhara V N IIIT BangaloreDocument26 pagesAVL Trees: Muralidhara V N IIIT Bangalorefarzi kaamNo ratings yet
- CPSC 388 - Compiler Design and Construction: Scanner - Regular Expressions To DFADocument23 pagesCPSC 388 - Compiler Design and Construction: Scanner - Regular Expressions To DFAArunkumar PanneerselvamNo ratings yet
- OOP Inheritance in JavaDocument13 pagesOOP Inheritance in JavaSarath ChandraNo ratings yet
- OR Lecture NotesDocument1 pageOR Lecture NotesS Deva Prasad0% (1)