You might also like
- The Box-Jenkins Methodology For RIMA ModelsDocument172 pagesThe Box-Jenkins Methodology For RIMA ModelscristianmondacaNo ratings yet
- Forecasting MethodsDocument26 pagesForecasting MethodsPurvaNo ratings yet
- Time Series ARIMA Models PDFDocument22 pagesTime Series ARIMA Models PDFahmeddanafNo ratings yet
- 08 Notes 5 GOODDocument20 pages08 Notes 5 GOODalanpicard2303No ratings yet
- Arma ArimaDocument10 pagesArma ArimachaitukmrNo ratings yet
- M Tech Data Science Forecasting ModelsDocument173 pagesM Tech Data Science Forecasting ModelskhkarthikNo ratings yet
- ARIMA Modeling of Mobile Phone Usage DataDocument45 pagesARIMA Modeling of Mobile Phone Usage DataRaychell Manuel Santos-EmbileNo ratings yet
- David A. Dickey, North Carolina State Univ., Raleigh, NC: Case Studies in Time SeriesDocument9 pagesDavid A. Dickey, North Carolina State Univ., Raleigh, NC: Case Studies in Time SeriesAshish PandeyNo ratings yet
- Time Series ForecastingDocument7 pagesTime Series ForecastingAlok KashyapNo ratings yet
- Chapter 7 - TThe Box-Jenkins Methodology For ARIMA ModelsDocument205 pagesChapter 7 - TThe Box-Jenkins Methodology For ARIMA Modelsnkminh19082003No ratings yet
- Timeseries ModifiedDocument12 pagesTimeseries ModifiedsikandarshahNo ratings yet
- Time Series Analysis: C5 ARIMA (Box-Jenkins) ModelsDocument14 pagesTime Series Analysis: C5 ARIMA (Box-Jenkins) ModelsStella Ngoleka IssatNo ratings yet
- Stat 497 - LN4Document67 pagesStat 497 - LN4Julian DiazNo ratings yet
- ARIMA Modeling:: B-J ProcedureDocument26 pagesARIMA Modeling:: B-J ProcedureMayank RawatNo ratings yet
- Sas Arma ForecastDocument11 pagesSas Arma ForecastSahil MakkerNo ratings yet
- Automatic ForecastingDocument7 pagesAutomatic ForecastingRodrigo Vallejos VergaraNo ratings yet
- Econometrics Year 3 EcoDocument185 pagesEconometrics Year 3 Ecoantoinette MWANAKASALANo ratings yet
- Arima Modeling With R ListendataDocument12 pagesArima Modeling With R ListendataHarshalKolhatkarNo ratings yet
- Arima 1Document19 pagesArima 1Shash KenNo ratings yet
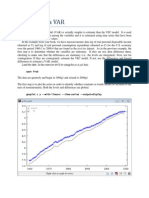
- Estimating a VAR Model in GRETLDocument9 pagesEstimating a VAR Model in GRETLkaddour7108No ratings yet
- Time Series - Practical ExercisesDocument9 pagesTime Series - Practical ExercisesJobayer Islam TunanNo ratings yet
- Order-Based Resonance Identification Using Operational PolyMAXDocument10 pagesOrder-Based Resonance Identification Using Operational PolyMAXRajesh KachrooNo ratings yet
- The Box-Jenkins Methodology For RIMA ModelsDocument180 pagesThe Box-Jenkins Methodology For RIMA ModelsAdil Bin KhalidNo ratings yet
- An Insight Into Noise Covariance Estimation For Kalman Filter DesignDocument6 pagesAn Insight Into Noise Covariance Estimation For Kalman Filter DesignAzhar IqbalNo ratings yet
- Constructing ARMA Models in RstudioDocument7 pagesConstructing ARMA Models in RstudioFernando Perez SavadorNo ratings yet
- JML ArimaDocument37 pagesJML Arimapg aiNo ratings yet
- Forecasting: Putting It ALL TogetherDocument18 pagesForecasting: Putting It ALL TogetherJosh2002No ratings yet
- Observadores Verghese SandersDocument10 pagesObservadores Verghese SandersJosé Moraes Gurgel NetoNo ratings yet
- Modelling Greek Industrial Production IndexDocument19 pagesModelling Greek Industrial Production IndexItalo Arbulú VillanuevaNo ratings yet
- AutocorrelationDocument49 pagesAutocorrelationBenazir Rahman0% (1)
- The Box Jenkins Using Minitab 3Document46 pagesThe Box Jenkins Using Minitab 3sweetNo ratings yet
- Tututu TutuDocument12 pagesTututu Tutusantujai26No ratings yet
- Lecture 2 Time Series ForecastingDocument49 pagesLecture 2 Time Series Forecastingرضا قاجهNo ratings yet
- ARIMA Modeling B-J ProcedureDocument26 pagesARIMA Modeling B-J ProcedureHarsh KhemkaNo ratings yet
- Assignment in RDocument5 pagesAssignment in RMayukh SahaNo ratings yet
- Advanced Econometric Problem SetDocument4 pagesAdvanced Econometric Problem SetJonnysimpsonNo ratings yet
- What Is System Identification: Different Approaches To System Identification Depending On Model ClassDocument48 pagesWhat Is System Identification: Different Approaches To System Identification Depending On Model ClassSuji RajanNo ratings yet
- IFAC SYSID09 Schoukens BenchmarkDocument4 pagesIFAC SYSID09 Schoukens BenchmarkHamid HamouchiNo ratings yet
- ACFDocument27 pagesACFAnand SatsangiNo ratings yet
- Assignment3 Zhao ZihuiDocument8 pagesAssignment3 Zhao Zihuizhaozhaozizizi2No ratings yet
- Week5 Lab ReportDocument10 pagesWeek5 Lab ReportVictorNo ratings yet
- Iserman 05Document9 pagesIserman 05Caballo Blanco DONo ratings yet
- Phase Locked Loop Design FundamentalsDocument22 pagesPhase Locked Loop Design Fundamentalsptt3iNo ratings yet
- Arima: Autoregressive Integrated Moving AverageDocument32 pagesArima: Autoregressive Integrated Moving AverageJoshy_29No ratings yet
- 1, Which Is Mainly ComDocument4 pages1, Which Is Mainly ComIgor ErcegNo ratings yet
- Testing The Volatility and Leverage Feedback Hypotheses Using GARCH (1,1) and VAR ModelsDocument22 pagesTesting The Volatility and Leverage Feedback Hypotheses Using GARCH (1,1) and VAR ModelsFisher BlackNo ratings yet
- ARIMA/GARCH models and spectral analysisDocument32 pagesARIMA/GARCH models and spectral analysisRewa ShankarNo ratings yet
- Example Arm A EstimationDocument6 pagesExample Arm A EstimationShadowfax_uNo ratings yet
- Time Series 2 - 2Document12 pagesTime Series 2 - 2MFaisalAbdaHasanNo ratings yet
- Arima WordDocument13 pagesArima WordAmit PatelNo ratings yet
- Vehicle acoustic field analysis and synthesisDocument6 pagesVehicle acoustic field analysis and synthesisioncopaeNo ratings yet
- Iscas06 Random SamplingDocument4 pagesIscas06 Random SamplingJaswinder Pal BehlNo ratings yet
- Univariate Time Series Models and Forecasting TechniquesDocument23 pagesUnivariate Time Series Models and Forecasting TechniquesDorinaPaladeNo ratings yet
- 2.2.piroject MacroeconomrticDocument20 pages2.2.piroject MacroeconomrticRame100% (1)
- ARIMA Modelling in RDocument7 pagesARIMA Modelling in Ramme_puspitaNo ratings yet
- Applying Kalman Filtering in Solving SSM Estimation Problem by The Means of EM Algorithm With Considering A Practical ExampleDocument8 pagesApplying Kalman Filtering in Solving SSM Estimation Problem by The Means of EM Algorithm With Considering A Practical ExampleJournal of ComputingNo ratings yet
- Analysis of Financial Time Series Models with EViewsDocument13 pagesAnalysis of Financial Time Series Models with EViewsZakia ShaheenNo ratings yet
- GARCH Models: Structure, Statistical Inference and Financial ApplicationsFrom EverandGARCH Models: Structure, Statistical Inference and Financial ApplicationsRating: 5 out of 5 stars5/5 (1)
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsFrom EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsNo ratings yet
- ArfimaDocument20 pagesArfimaرضا قاجهNo ratings yet
- Chapter 12Document60 pagesChapter 12رضا قاجهNo ratings yet
- Lecture 2 Time Series ForecastingDocument49 pagesLecture 2 Time Series Forecastingرضا قاجهNo ratings yet
- Long Memory Models and Fractional DifferencingDocument9 pagesLong Memory Models and Fractional Differencingرضا قاجهNo ratings yet
- 12Document13 pages12رضا قاجهNo ratings yet
- Assuring The Quality of Test and Calibration Results (5.9) : 7.5.1 Use of Certified Reference MaterialsDocument19 pagesAssuring The Quality of Test and Calibration Results (5.9) : 7.5.1 Use of Certified Reference MaterialsfelicityNo ratings yet
- PSY107 Lecture 6 – Testing Assumptions in NHSTDocument50 pagesPSY107 Lecture 6 – Testing Assumptions in NHSTthivyaashini SellaNo ratings yet
- CSC425 Time Series Analysis & Forecasting HomeworkDocument2 pagesCSC425 Time Series Analysis & Forecasting HomeworkTrinadh GuptaNo ratings yet
- 7 QC ToolsDocument80 pages7 QC ToolsVivek Shrivastava100% (2)
- Wind Screen WipersDocument7 pagesWind Screen Wiperszac18992No ratings yet
- v2 Precision Accuracy and Total Analytical PDFDocument2 pagesv2 Precision Accuracy and Total Analytical PDFJie ChuNo ratings yet
- Industrial Engineering (Simple Linear)Document82 pagesIndustrial Engineering (Simple Linear)Hencystefa 'IrawanNo ratings yet
- Introduction To Time Series Regression and Forecasting: Time Series Data Are Data Collected On The SameDocument53 pagesIntroduction To Time Series Regression and Forecasting: Time Series Data Are Data Collected On The SamerashidoxfordNo ratings yet
- HSE Area Classification For Secondary ReleaseDocument192 pagesHSE Area Classification For Secondary ReleaseNivindasNo ratings yet
- Maths Project (XII) - Probability-FinalDocument18 pagesMaths Project (XII) - Probability-FinalAnwesha Kar, XII B, Roll No:11No ratings yet
- Bman 01Document26 pagesBman 01Hazel Jane PuntoNo ratings yet
- PS CarnotDocument2 pagesPS CarnotBien BasbasNo ratings yet
- Bulking of Fine AggregateDocument7 pagesBulking of Fine AggregateDeep DebnathNo ratings yet
- Bootstrap PDFDocument28 pagesBootstrap PDFDaniel AraujoNo ratings yet
- Understanding HeteroskedasticityDocument54 pagesUnderstanding HeteroskedasticitySunny SinghNo ratings yet
- Confidence IntervalDocument12 pagesConfidence IntervalObuli KarthikeyanNo ratings yet
- Determination of The Cohesive Zone of The Blast Furnace PDFDocument9 pagesDetermination of The Cohesive Zone of The Blast Furnace PDFhalder_kalyan9216100% (1)
- Sans10160 8Document27 pagesSans10160 8Mustufa F KanjetaNo ratings yet
- RC163Document13 pagesRC163tamenrotNo ratings yet
- Stat Review - KellerDocument209 pagesStat Review - KellerMangala SemageNo ratings yet
- Environmental engineering guideDocument23 pagesEnvironmental engineering guideFaiqoh NahareyNo ratings yet
- Chapter 3Document17 pagesChapter 3Kharil Naim SallehNo ratings yet
- Probability ExamplesDocument4 pagesProbability ExamplesMohamad Akmal HakimNo ratings yet
- Chapter 9 - Forecasting TechniquesDocument50 pagesChapter 9 - Forecasting TechniquesPankaj MaryeNo ratings yet
- Unit 7 Test - Carias 1Document10 pagesUnit 7 Test - Carias 1api-293308991No ratings yet
- Two-stage Cluster Sampling Design and AnalysisDocument119 pagesTwo-stage Cluster Sampling Design and AnalysisZahra HassanNo ratings yet
- GDP Forecasting Using Time Series AnalysisDocument15 pagesGDP Forecasting Using Time Series AnalysisAnujNagpalNo ratings yet
- Regression - Biostatistics and Research Methodology Theory, NotesDocument3 pagesRegression - Biostatistics and Research Methodology Theory, Notesfunnymemesworld2023No ratings yet
- Plugin Seasonal+Adjustment+ +Instructions+for+Seasonal+Adjustment+With+Demetra+ (Sept.+2009)Document25 pagesPlugin Seasonal+Adjustment+ +Instructions+for+Seasonal+Adjustment+With+Demetra+ (Sept.+2009)any_gNo ratings yet
- LESSON PLANS-Geography Form I - IVDocument249 pagesLESSON PLANS-Geography Form I - IVMartin Otundo Richard75% (4)