You might also like
- Mathematical Modeling of Dynamic Systems: Lecture 4 & 5Document6 pagesMathematical Modeling of Dynamic Systems: Lecture 4 & 5MamdouhAlhanafyNo ratings yet
- Chapter 2 - Maintenance PoliciesDocument62 pagesChapter 2 - Maintenance PoliciesMamdouhAlhanafy100% (2)
- Transient Response Specifications of Second-Order SystemsDocument13 pagesTransient Response Specifications of Second-Order SystemsMamdouhAlhanafyNo ratings yet
- State Space Models: Lecture 6 & 7Document6 pagesState Space Models: Lecture 6 & 7MamdouhAlhanafyNo ratings yet
- 16 - Turbo Expanders 0Document13 pages16 - Turbo Expanders 0MamdouhAlhanafy100% (1)
- Pressure Relief Devices Scott OstrowskiDocument82 pagesPressure Relief Devices Scott OstrowskiAffify AfifyNo ratings yet
- Why Vibration Testing Needed?Document12 pagesWhy Vibration Testing Needed?MamdouhAlhanafyNo ratings yet
- Laplace Transform for Solving Linear ODEsDocument8 pagesLaplace Transform for Solving Linear ODEsMamdouhAlhanafyNo ratings yet
- Lecture 1Document16 pagesLecture 1MamdouhAlhanafyNo ratings yet
- 11 PumpsDocument46 pages11 PumpsMamdouhAlhanafyNo ratings yet
- Pumps: Types, Working Mechanism, and Performance FactorsDocument7 pagesPumps: Types, Working Mechanism, and Performance FactorszebmechNo ratings yet
- Pipe Fitter HandbookDocument62 pagesPipe Fitter HandbookMamdouhAlhanafy89% (9)
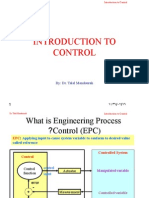
- Introduction To Control: By: Dr. Talal MandourahDocument12 pagesIntroduction To Control: By: Dr. Talal MandourahMamdouhAlhanafyNo ratings yet
- Rotating Equipment Chapter 3 PumpsDocument125 pagesRotating Equipment Chapter 3 PumpsMamdouhAlhanafy100% (3)
- 4 CouplingsDocument28 pages4 CouplingsMamdouhAlhanafyNo ratings yet
- Chapter 3 - Maintenance OrganizationDocument23 pagesChapter 3 - Maintenance OrganizationMamdouhAlhanafyNo ratings yet
- Maintenance Types and ObjectivesDocument35 pagesMaintenance Types and ObjectivesVaraGoudNo ratings yet
- Flare Systems Design and Operation GuideDocument49 pagesFlare Systems Design and Operation GuideMamdouhAlhanafy82% (11)
- Improve Your SkillsDocument112 pagesImprove Your SkillsAhmed El-Saadany100% (1)
- Improving Pumping System PerformanceDocument122 pagesImproving Pumping System PerformanceFSnyderJr100% (7)
- Chapter 1 - IntroductionDocument26 pagesChapter 1 - IntroductionMamdouhAlhanafyNo ratings yet
- 7 - Distillation0 PDFDocument58 pages7 - Distillation0 PDFMamdouhAlhanafyNo ratings yet
- Bearing DesignDocument11 pagesBearing DesignArun DhawanNo ratings yet
- Flare Systems Design and Operation GuideDocument49 pagesFlare Systems Design and Operation GuideMamdouhAlhanafy82% (11)
- Hydrulic Hose and FittingDocument66 pagesHydrulic Hose and FittingMamdouhAlhanafyNo ratings yet
- PT FundamentalsDocument84 pagesPT FundamentalsMamdouhAlhanafyNo ratings yet
- Water JetDocument18 pagesWater Jetjithinaravind007100% (1)
- Material PropertiesDocument331 pagesMaterial PropertiesMamdouhAlhanafyNo ratings yet
- Die Bosch ABS The World's First System For Closed-Loop Control of Vehicle DynamicsDocument27 pagesDie Bosch ABS The World's First System For Closed-Loop Control of Vehicle DynamicsMamdouhAlhanafy100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- CENG 314 Data Acquisition and Digital Signal Processing Lecture NotesDocument26 pagesCENG 314 Data Acquisition and Digital Signal Processing Lecture NoteslvrevathiNo ratings yet
- Normas AMEF FMEA Ver 01Document2 pagesNormas AMEF FMEA Ver 01jose EscobarNo ratings yet
- Hydro Mechanical Systems in Simulink in SL Part 2 PDFDocument20 pagesHydro Mechanical Systems in Simulink in SL Part 2 PDFAbdulhmeed MutalatNo ratings yet
- BPR Managing Process FlowsDocument30 pagesBPR Managing Process FlowsPrudhvinadh KopparapuNo ratings yet
- Chapter 1 - ContentDocument85 pagesChapter 1 - ContentMalik KirbyNo ratings yet
- EE 215E Signaling and Synchronization Signaling and Synchronization Lecture 8: PLL Basics Lecture 8: PLL BasicsDocument52 pagesEE 215E Signaling and Synchronization Signaling and Synchronization Lecture 8: PLL Basics Lecture 8: PLL BasicssaumyabaidyaNo ratings yet
- Basic Control Actions and Controller TypesDocument82 pagesBasic Control Actions and Controller TypesNavdeepNo ratings yet
- MPPLDocument70 pagesMPPLFarhan Wildan GNo ratings yet
- PID and Open vs Closed Loop SystemsDocument2 pagesPID and Open vs Closed Loop SystemsGabriel GabuyaNo ratings yet
- Four Phases of Unified Process with Diagrams and Use Case ModelDocument8 pagesFour Phases of Unified Process with Diagrams and Use Case ModelShri RaamNo ratings yet
- Artificial Intelligence - WikipediaDocument53 pagesArtificial Intelligence - Wikipediasham_codeNo ratings yet
- Dea 5.1 Karta Indramat Manual PDFDocument132 pagesDea 5.1 Karta Indramat Manual PDFVasileSpireaNo ratings yet
- Capitulo 9 Incropera 4 EdDocument16 pagesCapitulo 9 Incropera 4 EdDaxon RodriguezNo ratings yet
- School of Management ThoughtDocument9 pagesSchool of Management ThoughtKikelomo j OlatundeNo ratings yet
- Reinforcement Learning DetailsDocument9 pagesReinforcement Learning DetailsAhsan IsmailNo ratings yet
- Lecture VI - PID Controller in Pneumatic System (Use Case)Document21 pagesLecture VI - PID Controller in Pneumatic System (Use Case)R.W. Saputra100% (1)
- Introduction To Real-Time Systems: Peter PuschnerDocument19 pagesIntroduction To Real-Time Systems: Peter PuschnerMohamed ShabanNo ratings yet
- OOS Control SchematicDocument1 pageOOS Control SchematicRiky FitriadiNo ratings yet
- R.G. Coyle - System Dynamics ModellingDocument426 pagesR.G. Coyle - System Dynamics ModellingKhalis Mahmudah100% (4)
- Unit Testing and Test Case Design TechniquesDocument51 pagesUnit Testing and Test Case Design TechniquessrivatsaNo ratings yet
- Unesco - Eolss Sample Chapters: Digital Control SystemsDocument9 pagesUnesco - Eolss Sample Chapters: Digital Control SystemsShubham SharmaNo ratings yet
- Heat EngineDocument12 pagesHeat Engineaiman naimNo ratings yet
- TMForum - Frameworsx Overviewv1Document58 pagesTMForum - Frameworsx Overviewv1José EvangelistaNo ratings yet
- CHM 650: Statistical Mechanics and Its Applications To ChemistryDocument2 pagesCHM 650: Statistical Mechanics and Its Applications To ChemistrySorayaNo ratings yet
- Advanced SoftwareDocument208 pagesAdvanced SoftwareSuganthi RavindrenNo ratings yet
- ME382 Time Domain Analysis Block DiagramsDocument15 pagesME382 Time Domain Analysis Block DiagramsEmine TuğcanNo ratings yet
- Untitled PDFDocument151 pagesUntitled PDFCORAL ALONSONo ratings yet
- Modern Control Systems 13th Edition Ebook PDFDocument42 pagesModern Control Systems 13th Edition Ebook PDFmary.kilberg283100% (33)
- Ssi En60601-1-4a1 ChecklistDocument13 pagesSsi En60601-1-4a1 Checklisthamed IranpourNo ratings yet