You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- PPSC Computer MCQDocument66 pagesPPSC Computer MCQChauhan67% (24)
- 2vaa000844 V2 PDFDocument387 pages2vaa000844 V2 PDFvodanh100% (1)
- GeometryDocument31 pagesGeometryarchumeenabalu100% (1)
- GeometryDocument31 pagesGeometryarchumeenabalu100% (1)
- User Manual: 9400 SeriesDocument235 pagesUser Manual: 9400 SeriesMd. Shahrear SultanNo ratings yet
- Mindray Datascope Passport V - Service ManualDocument132 pagesMindray Datascope Passport V - Service ManualSergio PérezNo ratings yet
- Norsok Standard I-005u3 1Document244 pagesNorsok Standard I-005u3 1mcaamaNo ratings yet
- Attenuation in Neper: Attenuation in Decibel:: 1 2 LN 20 LogDocument3 pagesAttenuation in Neper: Attenuation in Decibel:: 1 2 LN 20 LogarchumeenabaluNo ratings yet
- Attenuation in Neper: Attenuation in Decibel:: 1 2 LN 20 LogDocument3 pagesAttenuation in Neper: Attenuation in Decibel:: 1 2 LN 20 LogarchumeenabaluNo ratings yet
- Quants-Points 2 Remember For CAT and XATDocument10 pagesQuants-Points 2 Remember For CAT and XATbilalak1990No ratings yet
- SYLLABUSDocument2 pagesSYLLABUSarchumeenabaluNo ratings yet
- HSN - 2mks With AnsDocument16 pagesHSN - 2mks With AnsarchumeenabaluNo ratings yet
- SSC CGL Exam 101113Document20 pagesSSC CGL Exam 101113archumeenabaluNo ratings yet
- HSN SyllabusDocument1 pageHSN SyllabusarchumeenabaluNo ratings yet
- TrigonometruyDocument3 pagesTrigonometruyRitu SharmaNo ratings yet
- September 2015 Current AffairsDocument10 pagesSeptember 2015 Current AffairsarchumeenabaluNo ratings yet
- July 2015 Current AffairsDocument4 pagesJuly 2015 Current AffairsarchumeenabaluNo ratings yet
- Fundamental IntroductiontothePracticeofTelemedicineDocument7 pagesFundamental IntroductiontothePracticeofTelemedicinearchumeenabaluNo ratings yet
- Tele MedicineDocument11 pagesTele MedicinearchumeenabaluNo ratings yet
- Introduction To Optical CommunicationDocument13 pagesIntroduction To Optical CommunicationJitendra ThakurNo ratings yet
- Bus Arbitration Means Settlement Among Different ModulesDocument1 pageBus Arbitration Means Settlement Among Different ModulesarchumeenabaluNo ratings yet
- In Computer ProgrammingDocument1 pageIn Computer ProgrammingarchumeenabaluNo ratings yet
- Cryptography & Network SecurityDocument63 pagesCryptography & Network Securityrubyamala100% (1)
- CryptographyDocument38 pagesCryptographyAmar SawriNo ratings yet
- Data Communicatin and NetworkingDocument30 pagesData Communicatin and NetworkingarchumeenabaluNo ratings yet
- 3DDocument37 pages3DJubin JainNo ratings yet
- Advanced pipelining techniques for instruction level parallelismDocument108 pagesAdvanced pipelining techniques for instruction level parallelismAmit7837No ratings yet
- DefibrillationDocument11 pagesDefibrillationarchumeenabaluNo ratings yet
- Chapter08 MultiprocessorsDocument24 pagesChapter08 MultiprocessorsarchumeenabaluNo ratings yet
- SYLLABUSDocument2 pagesSYLLABUSarchumeenabaluNo ratings yet
- Chapter 1 - Fundamentals of Computer DesignDocument40 pagesChapter 1 - Fundamentals of Computer Designarchumeenabalu100% (1)
- Op-Amp Fundamentals ExplainedDocument32 pagesOp-Amp Fundamentals ExplainedMd Asadul HoqueNo ratings yet
- CommunicationsDocument56 pagesCommunicationsarchumeenabaluNo ratings yet
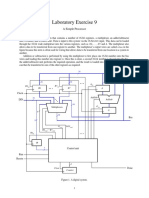
- Laboratory Exercise 9: A Simple ProcessorDocument8 pagesLaboratory Exercise 9: A Simple ProcessorhxchNo ratings yet
- Comp 100 ReviewerDocument3 pagesComp 100 ReviewerFionalee B.No ratings yet
- Seminar On Input and Output DevicesDocument16 pagesSeminar On Input and Output Devicesabolarinoladele50% (2)
- William Stallings Computer Organization and Architecture 8 Edition Input/OutputDocument37 pagesWilliam Stallings Computer Organization and Architecture 8 Edition Input/Outputnami hakiNo ratings yet
- Bba Sem-1: Material For CIA-1 ExamDocument7 pagesBba Sem-1: Material For CIA-1 ExamBhalala UrvashNo ratings yet
- ADRE System: Bently Nevada Asset Condition MonitoringDocument12 pagesADRE System: Bently Nevada Asset Condition MonitoringFITAS MOUNIRNo ratings yet
- Lecture - 1 - Introduction - AhsanDocument29 pagesLecture - 1 - Introduction - AhsanRamish SaeedNo ratings yet
- FX2 MIB - RM - RevADocument4 pagesFX2 MIB - RM - RevAAlberto Chillon NavarreteNo ratings yet
- 840D SL Extended Functions PDFDocument1,132 pages840D SL Extended Functions PDFSGXNo ratings yet
- Acs Tech90Document191 pagesAcs Tech90ramjoce100% (1)
- STD 12 Computer Chapter 11 File Handling in JavaDocument7 pagesSTD 12 Computer Chapter 11 File Handling in JavaAmisha DalalNo ratings yet
- Brain Computer Interfacewithg MOBIlabDocument13 pagesBrain Computer Interfacewithg MOBIlab60565882No ratings yet
- C & Ds Notes 2022-2023 r22 SyllabusDocument210 pagesC & Ds Notes 2022-2023 r22 Syllabusbabaforever786No ratings yet
- Service Manual for Suzuki AM/FM Tuner CD Combi Model PS-2760DDocument20 pagesService Manual for Suzuki AM/FM Tuner CD Combi Model PS-2760DArdelean GrigoreNo ratings yet
- The Smart Approach To Transactional PrintingDocument2 pagesThe Smart Approach To Transactional PrintingEdwin LimaNo ratings yet
- Assemblers and Development Tools for 8086 and 8051 Microprocessors Lab ManualDocument104 pagesAssemblers and Development Tools for 8086 and 8051 Microprocessors Lab ManualJesse Ray100% (1)
- BOQ Museum Tsunami 2021 TerbaruDocument20 pagesBOQ Museum Tsunami 2021 Terbarualfyn anestesyaNo ratings yet
- APG40 Quick Command ReferenceDocument3 pagesAPG40 Quick Command ReferenceGaurav SrivastavaNo ratings yet
- Computer Fundamentals and Office AutomationDocument297 pagesComputer Fundamentals and Office AutomationbogasrinuNo ratings yet
- Buses in Computer Architecture PDFDocument6 pagesBuses in Computer Architecture PDFshravan upaseNo ratings yet
- Intro to Java Programming and Computer BasicsDocument82 pagesIntro to Java Programming and Computer BasicsHayat IsmailNo ratings yet
- Royal Commission For Jubail and Yanbu 021-C19: Document No: Rev. I C - 0 3 3 0 - F - 1 0 2Document12 pagesRoyal Commission For Jubail and Yanbu 021-C19: Document No: Rev. I C - 0 3 3 0 - F - 1 0 2arshad iqbalNo ratings yet
- JVC RXE 111 RSL Service ManualDocument54 pagesJVC RXE 111 RSL Service ManualPE TruNo ratings yet
- Hollias Macs V6 Training: Hardware Introduction - KM SeriesDocument71 pagesHollias Macs V6 Training: Hardware Introduction - KM Seriesmessam110No ratings yet
- GDM GuideDocument354 pagesGDM GuideGerard SortoNo ratings yet