You might also like
- Aerial Perspectives - Mastering Drone PhotographyFrom EverandAerial Perspectives - Mastering Drone PhotographyNo ratings yet
- Unmanned Aerial Systems: Theoretical Foundation and ApplicationsFrom EverandUnmanned Aerial Systems: Theoretical Foundation and ApplicationsNo ratings yet
- A Vision-Based Automatic Landing Method For Fixed Wing UAVsDocument15 pagesA Vision-Based Automatic Landing Method For Fixed Wing UAVsAli YasinNo ratings yet
- Sensors: A Multi-Step CNN-Based Estimation of Aircraft Landing Gear AnglesDocument17 pagesSensors: A Multi-Step CNN-Based Estimation of Aircraft Landing Gear AnglesKrasakKrusuk Si MaulNo ratings yet
- Seare Girum Gebrehaweria Department of Electronics and Communication Engineering Mekelle Institute of TechnologyDocument9 pagesSeare Girum Gebrehaweria Department of Electronics and Communication Engineering Mekelle Institute of TechnologySeare GirumNo ratings yet
- Autonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniDocument7 pagesAutonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniexampleNo ratings yet
- SYS 500 Fundamentals of System Engineering: Team 5 Abdulrahman Almijlad Lang Chen Junming CuiDocument8 pagesSYS 500 Fundamentals of System Engineering: Team 5 Abdulrahman Almijlad Lang Chen Junming CuiAnonymous jyVYEsNo ratings yet
- Autopilot: Controls That Holds The Aircraft On Any Selected MagneticDocument13 pagesAutopilot: Controls That Holds The Aircraft On Any Selected MagneticDiptoNo ratings yet
- InTech-Fly The Camera Perspective Control of A Remotely Operated Quadrotor Uav and Camera UnitDocument29 pagesInTech-Fly The Camera Perspective Control of A Remotely Operated Quadrotor Uav and Camera UnitedwardsilvaNo ratings yet
- ArducopterDocument16 pagesArducopterSummer CoolNo ratings yet
- Design and Development of The Hardware For Vision Based UAV AutopilotDocument6 pagesDesign and Development of The Hardware For Vision Based UAV AutopilotJoshua DanielNo ratings yet
- VISION-BASED AUTONOMOUS LANDINGDocument6 pagesVISION-BASED AUTONOMOUS LANDINGShubham SinghalNo ratings yet
- Wireless SURVEILLANCE MicroDocument3 pagesWireless SURVEILLANCE MicroJohn BrittoNo ratings yet
- SENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTDocument28 pagesSENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTMahaManthraNo ratings yet
- Fundamental Aspects Required When Designing An Autonomous QuadcopterDocument5 pagesFundamental Aspects Required When Designing An Autonomous QuadcopterRikko PutraNo ratings yet
- Cardiff University UAV Design & Testing with LabVIEW & FlightGear SimDocument1 pageCardiff University UAV Design & Testing with LabVIEW & FlightGear SimSareer KhanNo ratings yet
- (J) - 2024 - Vision-Based Autonomous Landing and Charging System For A Hexacopter DroneDocument13 pages(J) - 2024 - Vision-Based Autonomous Landing and Charging System For A Hexacopter Dronedr.awawdeh.moathNo ratings yet
- Mics2010 Submission 36 PDFDocument11 pagesMics2010 Submission 36 PDFPravin PatilNo ratings yet
- PID ControllerDocument3 pagesPID ControllerBart llNo ratings yet
- ICRA Andrew MillerDocument24 pagesICRA Andrew MillerRajesh BhanushaliNo ratings yet
- FYP Project: A Cockpit Controlled Radio AirplaneDocument14 pagesFYP Project: A Cockpit Controlled Radio AirplanedelwyntanNo ratings yet
- Instrument Rating: Ninty Nine Flying SchoolDocument89 pagesInstrument Rating: Ninty Nine Flying SchoolMohamed HassanNo ratings yet
- ICUAS14 Kendall Salvapantula StolDocument8 pagesICUAS14 Kendall Salvapantula StolSomefun OluwasegunNo ratings yet
- 5.15 Typical Aircraft Instrument SystemsDocument44 pages5.15 Typical Aircraft Instrument Systemssyed kazmi100% (1)
- Vikram Patil UavDocument6 pagesVikram Patil Uavkaran11deshmukhNo ratings yet
- New Microsoft Word DocumentDocument3 pagesNew Microsoft Word DocumentakashNo ratings yet
- Wireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanDocument24 pagesWireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanManojNo ratings yet
- Autonomous Hovering of A Vision/IMU Guided QuadrotorDocument6 pagesAutonomous Hovering of A Vision/IMU Guided QuadrotorKok Kai YitNo ratings yet
- ImplementationofAutonomousVisualDetection v6 RGDocument7 pagesImplementationofAutonomousVisualDetection v6 RGIshali SandbhorNo ratings yet
- Unnamed DroneDocument16 pagesUnnamed DroneManas JainNo ratings yet
- Drones: - Name: Sahana R - Reg No.Document15 pagesDrones: - Name: Sahana R - Reg No.sanadstaarrNo ratings yet
- Honeywell VDGSDocument5 pagesHoneywell VDGSNate ShriNo ratings yet
- AutopilotDocument21 pagesAutopilotShabrish ShabriNo ratings yet
- CHAPTER 9. Display Systems: 9.1. Situational AwarenessDocument12 pagesCHAPTER 9. Display Systems: 9.1. Situational AwarenessKing KrishnaNo ratings yet
- Autopilot Avionics SMF 3252 06/07-IIDocument42 pagesAutopilot Avionics SMF 3252 06/07-IImohd roziNo ratings yet
- Paper Presentation FIN ACTUATION CONTROL SYSTEM FOR GUIDED PROJECTILESDocument6 pagesPaper Presentation FIN ACTUATION CONTROL SYSTEM FOR GUIDED PROJECTILESjasveer2589No ratings yet
- 01 3 2 PDFDocument8 pages01 3 2 PDFak1828No ratings yet
- Introduction to UAVs Future UsesDocument12 pagesIntroduction to UAVs Future UsesPrajwal BirwadkarNo ratings yet
- Design of Basic Quadcopter Architecture: Assignment-3Document6 pagesDesign of Basic Quadcopter Architecture: Assignment-3Praveen J LNo ratings yet
- Part - I: - Principle of AvionicsDocument36 pagesPart - I: - Principle of AvionicsNiranjan MukeshNo ratings yet
- Rancang Bangun Uav Quadcopter Berbasis ArduinoDocument10 pagesRancang Bangun Uav Quadcopter Berbasis ArduinoAchmad Rozi NurhudaNo ratings yet
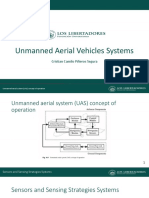
- Unmanned Aerial Vehicles Systems: Cristian Camilo Piñeros SeguraDocument13 pagesUnmanned Aerial Vehicles Systems: Cristian Camilo Piñeros Seguracristian camilo piñeros seguraNo ratings yet
- PPT-UNIT-1 L-7 To 8Document29 pagesPPT-UNIT-1 L-7 To 8Saheer ShaikNo ratings yet
- Drone Mini Project Report Analysis and DesignDocument31 pagesDrone Mini Project Report Analysis and DesignMed Rabeh100% (1)
- Guidance and Navigation of Aerospace Vehicles: March 2015Document41 pagesGuidance and Navigation of Aerospace Vehicles: March 2015sohaiblatif31No ratings yet
- Spherical VTOL UAV Summer Project DesignDocument11 pagesSpherical VTOL UAV Summer Project DesignPranab PrustyNo ratings yet
- Development of A Low-Cost Embedded Flight Controller For QuadcopterDocument6 pagesDevelopment of A Low-Cost Embedded Flight Controller For Quadcopter029Muhammad Robith Fikris SholihNo ratings yet
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 pagesControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleAfif PradhanaNo ratings yet
- Adaptive image-based visual servoing for underactuated UAVsDocument30 pagesAdaptive image-based visual servoing for underactuated UAVsMahdi LabedNo ratings yet
- IAFS-Aerial Navigation-VORDocument27 pagesIAFS-Aerial Navigation-VORioannaknt622No ratings yet
- Unmanned Miniature Drone Flight Type: Proposed Project Final YearDocument7 pagesUnmanned Miniature Drone Flight Type: Proposed Project Final YearNamrta JainNo ratings yet
- Drone FeasibilityDocument30 pagesDrone FeasibilityAbhishek PatiyalNo ratings yet
- Wireless Controlled Quad-CopterDocument8 pagesWireless Controlled Quad-CopternamithamahaleNo ratings yet
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 pagesControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleJU EE 2021No ratings yet
- Visual Tracking and Control of a Quadcopter Using Stereo CameraDocument8 pagesVisual Tracking and Control of a Quadcopter Using Stereo CameraYovi Herlin SaputraNo ratings yet
- Amphibious Surveillance Hovercraft, Major Project, Final Year, Btech-EC, 2011-12Document32 pagesAmphibious Surveillance Hovercraft, Major Project, Final Year, Btech-EC, 2011-12Saurabh SrivastavaNo ratings yet
- UAV or DRONE TECHNOLOGYDocument21 pagesUAV or DRONE TECHNOLOGYCHANDRAMOL VRNo ratings yet
- Display FlightInstrumentsDocument116 pagesDisplay FlightInstrumentsDpt HtegnNo ratings yet
- Unmanned Aerial VehicleDocument178 pagesUnmanned Aerial Vehicletanveershariff13No ratings yet
- Teknologi Drone Untuk Kepolisian: Tim Dosen Tekpol Stik-Ptik Jakarta 2021Document59 pagesTeknologi Drone Untuk Kepolisian: Tim Dosen Tekpol Stik-Ptik Jakarta 2021Still WhyNo ratings yet
- Raspberry Pi Projects Book PDFDocument204 pagesRaspberry Pi Projects Book PDFstanchan82100% (1)
- Online Book StoreDocument36 pagesOnline Book StoreGourab Dey100% (1)
- Berjuta Rasanya Tere Liye PDFDocument5 pagesBerjuta Rasanya Tere Liye PDFaulia nurmalitasari0% (1)
- Lyva Labs Manufacturing Cluster - SME Adoption of Advanced Manufacturing Technologies by Sujita PurushothamanDocument10 pagesLyva Labs Manufacturing Cluster - SME Adoption of Advanced Manufacturing Technologies by Sujita Purushothamansujita.purushothamanNo ratings yet
- IT0089 (Fundamentals of Analytics Modeling) : ExerciseDocument6 pagesIT0089 (Fundamentals of Analytics Modeling) : ExerciseAshley De JesusNo ratings yet
- Sap PP Interview QuestionDocument55 pagesSap PP Interview QuestionkumarNo ratings yet
- VFACE TOUCH AND BASIC QUICK INSTALLATION GUIDEDocument2 pagesVFACE TOUCH AND BASIC QUICK INSTALLATION GUIDEPunith RajNo ratings yet
- Section 1.1: Configure The ACME Headquarters Network (AS 12345) As Per The Following RequirementsDocument59 pagesSection 1.1: Configure The ACME Headquarters Network (AS 12345) As Per The Following Requirementsdimkatsar30No ratings yet
- SAP SRM 7.0 Strategic SourcingDocument90 pagesSAP SRM 7.0 Strategic SourcingSergio Martinez PerezNo ratings yet
- Mary PowellDocument53 pagesMary PowellAnonymous HZgwzwNo ratings yet
- Adams 2013 Training 740 WorkbookDocument458 pagesAdams 2013 Training 740 WorkbookAnonymous ZC1ld1CLm100% (1)
- Resume Juan Carlos MoralesDocument1 pageResume Juan Carlos Moralesjuancarlosmorales.1397No ratings yet
- 2021 Anna University RegulationsDocument415 pages2021 Anna University RegulationsThamarai KannanNo ratings yet
- Simple Way To Load Small Chunks of Data As You Scroll in Angular - by Ramya Balasubramanian - Geek Culture - Oct, 2021 - MediumDocument9 pagesSimple Way To Load Small Chunks of Data As You Scroll in Angular - by Ramya Balasubramanian - Geek Culture - Oct, 2021 - MediumRanjana PatilNo ratings yet
- Saas Solutions On Aws FinalDocument26 pagesSaas Solutions On Aws Finalfawares1No ratings yet
- AWUS036EW User Guide PDFDocument29 pagesAWUS036EW User Guide PDFFelipe GabrielNo ratings yet
- Question Total Quality ManagementDocument4 pagesQuestion Total Quality ManagementAztvNo ratings yet
- 2.tekla Structures 2016i Administrator's Release NotesDocument48 pages2.tekla Structures 2016i Administrator's Release NotesomerumeromerNo ratings yet
- Post Graduate Course Software Systems Iiit HyderabadDocument20 pagesPost Graduate Course Software Systems Iiit HyderabadLipun SwainNo ratings yet
- Presentation of Dairy Management SystemDocument35 pagesPresentation of Dairy Management SystemEnola Syawla100% (1)
- Vicon: Integrated Pump Vibration Monitoring SystemDocument2 pagesVicon: Integrated Pump Vibration Monitoring SystemMahmoud Al-SherbinyNo ratings yet
- Alzheimers Assistant PDFDocument34 pagesAlzheimers Assistant PDFabhirami manikandanNo ratings yet
- Oracle Financial FaqDocument259 pagesOracle Financial FaqAndrea NguyenNo ratings yet
- Final Year Project TopicsDocument112 pagesFinal Year Project TopicsJyothi BurlaNo ratings yet
- Alert Broadcasting Conferencing: Broadcasts and Alert NotificationsDocument4 pagesAlert Broadcasting Conferencing: Broadcasts and Alert Notificationsdaniel.bpmNo ratings yet
- SPDIF WhitepaperDocument14 pagesSPDIF Whitepaperapi-3760834100% (1)
- Langdo Led Lighting Co.,LimitedDocument24 pagesLangdo Led Lighting Co.,LimitedRudi CressaNo ratings yet
- CP Form formats guideDocument3 pagesCP Form formats guideAsadAli25% (4)
- V Flower Vocaloid Wiki FandomDocument1 pageV Flower Vocaloid Wiki FandomFlower chanNo ratings yet
- Chapter 3: Computer Instructions: ObjectivesDocument7 pagesChapter 3: Computer Instructions: ObjectivesSteffany RoqueNo ratings yet