You might also like
- Scarborough FairDocument2 pagesScarborough FairAndreaCariaNo ratings yet
- GEARDocument199 pagesGEARjhon greigNo ratings yet
- European Commission project aims for 100% renewable energy on Spanish islandDocument2 pagesEuropean Commission project aims for 100% renewable energy on Spanish islandV TsekNo ratings yet
- Tema 6 - Derivación DiscretaDocument5 pagesTema 6 - Derivación DiscretaLuyi WangNo ratings yet
- Graph: Equation StringDocument7 pagesGraph: Equation StringRahulNo ratings yet
- Topographic Map IndexDocument1 pageTopographic Map IndexEiflaRamosStaRitaNo ratings yet
- Gigantic Hyper S ALE: One Day OnlyDocument2 pagesGigantic Hyper S ALE: One Day OnlyThabang MoeraneNo ratings yet
- PLAN - 18DC0092 Part 4 of 13 PDFDocument4 pagesPLAN - 18DC0092 Part 4 of 13 PDFallan ardilloNo ratings yet
- Plan - 18dc0092 Part 4 of 13Document4 pagesPlan - 18dc0092 Part 4 of 13Runstedt FababierNo ratings yet
- Proposed Line With ORS and 2 Tonic LineDocument1 pageProposed Line With ORS and 2 Tonic Linechemi ronNo ratings yet
- Shelter C Ount January To M Arch 2019: Exam Ple of Shelter Point A NalysisDocument1 pageShelter C Ount January To M Arch 2019: Exam Ple of Shelter Point A Nalysisبكرة احلىNo ratings yet
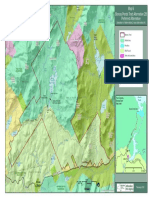
- Area of Known Wolf Activity OR30Document1 pageArea of Known Wolf Activity OR30Sinclair Broadcast Group - EugeneNo ratings yet
- Service: Fox 2004, Fox 2010, Fox 2014, Spacefox 2006, Spacefox 2011Document181 pagesService: Fox 2004, Fox 2010, Fox 2014, Spacefox 2006, Spacefox 2011jhon greigNo ratings yet
- Wankel Rot Ar y Engi Ne: Key Benet SDocument2 pagesWankel Rot Ar y Engi Ne: Key Benet STomásNo ratings yet
- White Horse Canoe Club MelbourneDocument1 pageWhite Horse Canoe Club MelbourneSunnyNo ratings yet
- Safety Valve SUS304 - SL40F-DDocument4 pagesSafety Valve SUS304 - SL40F-DhungNo ratings yet
- Catalogue ADP 12 PDFDocument1 pageCatalogue ADP 12 PDFPhan Nguyễn AudioNo ratings yet
- Proposed Dealership Workshop for Granites and Concretes Limited & Spallette Enterprises LimitedDocument31 pagesProposed Dealership Workshop for Granites and Concretes Limited & Spallette Enterprises LimitedOluwaseyi JohnNo ratings yet
- Spectrum HouseDocument2 pagesSpectrum HouseWorkspaceGroupPLCNo ratings yet
- AP High Court Telugu Medium - 47 - 14139116 - 2022 - 12 - 20 - 18 - 45Document5 pagesAP High Court Telugu Medium - 47 - 14139116 - 2022 - 12 - 20 - 18 - 45Sudha ManiNo ratings yet
- Struja Synergy 2.0Document6 pagesStruja Synergy 2.0Milan RadisicNo ratings yet
- Inspeccion de EscalerasDocument2 pagesInspeccion de EscalerasJuanNo ratings yet
- Aerial Age Vo1 1915Document646 pagesAerial Age Vo1 1915Aviation LibraryNo ratings yet
- Expo LogDocument1 pageExpo LogpatNo ratings yet
- Livada (Mellow)Document13 pagesLivada (Mellow)Ilija Atanasov100% (1)
- Story 1Document5 pagesStory 1angela krleskaNo ratings yet
- LS:LS?: Es.. IdDocument1 pageLS:LS?: Es.. IdlatatiNo ratings yet
- BooCax Autonomous Sterilization Robot-180CDocument2 pagesBooCax Autonomous Sterilization Robot-180CRobotics BoocaxNo ratings yet
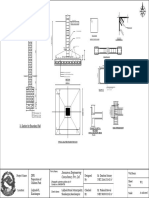
- X-Section For Boundary Wall: Janasewa Engineering Consultancy Pvt. LTDDocument1 pageX-Section For Boundary Wall: Janasewa Engineering Consultancy Pvt. LTDRooking Ewondo SfuutNo ratings yet
- POster EGU PDFDocument1 pagePOster EGU PDFAsaf Aguilar LemaNo ratings yet
- Maximizing Wi-Fi Capacity Through Effective PlanningDocument1 pageMaximizing Wi-Fi Capacity Through Effective PlanningMario MatizNo ratings yet
- AIE Catalogue Product 80SDocument2 pagesAIE Catalogue Product 80SekgujjuNo ratings yet
- Wankel Rotary Engine 40HPDocument2 pagesWankel Rotary Engine 40HPmuhammad rifai kelireyNo ratings yet
- Eighty Eight Project BrochureDocument21 pagesEighty Eight Project Brochure92km7jw9k5No ratings yet
- Informacoes Gerais UP Sistema EletricoDocument138 pagesInformacoes Gerais UP Sistema Eletricofelipe_finoNo ratings yet
- Absorption Chiller Technical SpecificationsDocument10 pagesAbsorption Chiller Technical SpecificationsMuhammed HusseinNo ratings yet
- Benoy Map SingaporeDocument1 pageBenoy Map SingaporeSean HardyNo ratings yet
- Tasmania MapDocument1 pageTasmania MaprcNo ratings yet
- Forbidden Lands - The Bitter ReachDocument314 pagesForbidden Lands - The Bitter ReachDiego Santana71% (14)
- Abbreviations Plumbing Symbols: Fort Worth DistrictDocument21 pagesAbbreviations Plumbing Symbols: Fort Worth DistrictDenzel NgNo ratings yet
- MGT 2E - The Trojan Reach Sector MapDocument2 pagesMGT 2E - The Trojan Reach Sector MapLorenzo AngellaNo ratings yet
- CERF Annual Results Report 2021Document45 pagesCERF Annual Results Report 2021MustafaNo ratings yet
- System Map of Niagara-on-the-Lake Transit RoutesDocument1 pageSystem Map of Niagara-on-the-Lake Transit RoutesKrishnaprasad KamisettyNo ratings yet
- capacitance of a capacitor labelled 2.2 μF which has a tolerance of ±30%Document3 pagescapacitance of a capacitor labelled 2.2 μF which has a tolerance of ±30%superpooh-1No ratings yet
- Umhlanga BrochureDocument19 pagesUmhlanga BrochuresafinditNo ratings yet
- New IGL BrochureDocument2 pagesNew IGL BrochureChun Chieh KeongNo ratings yet
- Maturity Model Using KanbanDocument1 pageMaturity Model Using Kanbanmailtonoorul4114No ratings yet
- ACAD-Esquema Hitos CASU-Layout2Document1 pageACAD-Esquema Hitos CASU-Layout2MARYURI KATHERINE CUBIDES ECHEVERRIANo ratings yet
- Module-14 Rev-06 PDFDocument168 pagesModule-14 Rev-06 PDFMD. Mahmudul Hasan LimonNo ratings yet
- Boreas Ponds TractDocument1 pageBoreas Ponds TractDan ShepardNo ratings yet
- Wankel Rot Ar y Engi Ne: Key Benet SDocument2 pagesWankel Rot Ar y Engi Ne: Key Benet Ssharky67No ratings yet
- 2009 Mathrubhumi CalendarDocument6 pages2009 Mathrubhumi Calendarksangeeth200075% (8)
- NQ 29Document100 pagesNQ 29John Smith100% (1)
- We Are Prosports. PL Ayer. Athl Ete. Create. Agency. Marketi Ng. Management Management. Champi Onshi P. TeamDocument1 pageWe Are Prosports. PL Ayer. Athl Ete. Create. Agency. Marketi Ng. Management Management. Champi Onshi P. TeamLuuucas XNo ratings yet
- East Main St Campus MapDocument1 pageEast Main St Campus MapRicky KerckhoveNo ratings yet
- Luxury Sky Homes Offer Unparalleled Living ExperienceDocument21 pagesLuxury Sky Homes Offer Unparalleled Living Experienceshhi laNo ratings yet
- Det-Tronics Flame DetectionDocument2 pagesDet-Tronics Flame DetectionGabriel MendezNo ratings yet
- EMSR568 AOI01 DEL PRODUCT r1 RTP01 v1Document1 pageEMSR568 AOI01 DEL PRODUCT r1 RTP01 v1Nélio FernandoNo ratings yet
- Ames Nowell PDFDocument1 pageAmes Nowell PDFGina HudsonNo ratings yet
- It's So Easy Going Green: An Interactive, Scientific Look at Protecting Our EnvironmentFrom EverandIt's So Easy Going Green: An Interactive, Scientific Look at Protecting Our EnvironmentNo ratings yet
- dSPACE ASM Product Information 2018-01 English PDFDocument40 pagesdSPACE ASM Product Information 2018-01 English PDFkkkprotNo ratings yet
- 3.design in Z Using Root Locus 2016 17Document8 pages3.design in Z Using Root Locus 2016 17kkkprotNo ratings yet
- Mother ToguerDocument3 pagesMother Togueryolic91No ratings yet
- YTU Cascaded First-Order Filters Introduce Second-Order Transfer FunctionsDocument58 pagesYTU Cascaded First-Order Filters Introduce Second-Order Transfer FunctionskkkprotNo ratings yet
- Solver ModificationDocument4 pagesSolver ModificationkkkprotNo ratings yet
- IMQDocument2 pagesIMQkkkprotNo ratings yet
- Luk Fail Diag Zms de enDocument48 pagesLuk Fail Diag Zms de enIndranil BhattacharyyaNo ratings yet
- Ballbot: A Low-Cost Robot For Tennis Ball Retrieval: John WangDocument12 pagesBallbot: A Low-Cost Robot For Tennis Ball Retrieval: John WangkkkprotNo ratings yet
- 1011049635Document250 pages1011049635muce01122917No ratings yet
- Week1 NotesDocument53 pagesWeek1 NoteskkkprotNo ratings yet
- Elbow Mixture Analysis: ISSN (PRINT) :2394-6202, (ONLINE) :2394-6210, VOLUME-1, ISSUE-2,2015Document14 pagesElbow Mixture Analysis: ISSN (PRINT) :2394-6202, (ONLINE) :2394-6210, VOLUME-1, ISSUE-2,2015kkkprotNo ratings yet
- FVM Witch OpenFOAM-MatlabDocument817 pagesFVM Witch OpenFOAM-MatlabDavid Mestanza100% (1)
- SiS7PID ControllerDocument15 pagesSiS7PID ControllerkkkprotNo ratings yet
- 2Document1 page2kkkprotNo ratings yet
- 1Document1 page1kkkprotNo ratings yet
- Self Aligning Ball Bearings BD 1205 EKTN9 H 205Document2 pagesSelf Aligning Ball Bearings BD 1205 EKTN9 H 205kkkprotNo ratings yet
- Intelligent Powertrain Design: Jimmy C. Mathews Advisors: Dr. Joseph Picone Dr. David GaoDocument44 pagesIntelligent Powertrain Design: Jimmy C. Mathews Advisors: Dr. Joseph Picone Dr. David GaokkkprotNo ratings yet
- Research Article: CFD Analysis of The Effect of Elbow Radius On Pressure Drop in Multiphase FlowDocument9 pagesResearch Article: CFD Analysis of The Effect of Elbow Radius On Pressure Drop in Multiphase FlowkkkprotNo ratings yet
- Angular Contact Ball Bearings Super-Precision-71818 ACD/HCDocument2 pagesAngular Contact Ball Bearings Super-Precision-71818 ACD/HCkkkprotNo ratings yet
- Bondgraph To Transfer FunctionsDocument19 pagesBondgraph To Transfer FunctionskkkprotNo ratings yet
- Max 3500N: DimensionsDocument1 pageMax 3500N: DimensionskkkprotNo ratings yet
- Deep Groove Ball Bearings-61910-2RS1Document1 pageDeep Groove Ball Bearings-61910-2RS1kkkprotNo ratings yet
- Hybrid Dynamic Systems Tutorial PDFDocument66 pagesHybrid Dynamic Systems Tutorial PDFkkkprot100% (1)
- A025 PaperDocument9 pagesA025 PaperkkkprotNo ratings yet
- Seminario 3Document47 pagesSeminario 3kkkprotNo ratings yet
- NLSC Lecture Notes 2017Document212 pagesNLSC Lecture Notes 2017kkkprotNo ratings yet
- 11 Sliding Mode ControlDocument9 pages11 Sliding Mode ControlKgotsofalang Kayson NqhwakiNo ratings yet
- NLSC Lecture Notes 2017Document212 pagesNLSC Lecture Notes 2017kkkprotNo ratings yet
- FulltextDocument85 pagesFulltextkkkprotNo ratings yet
- Partner Company Assessment FormDocument2 pagesPartner Company Assessment FormGWENDOLINE SENONo ratings yet
- A Rhetoric of ArgumentDocument398 pagesA Rhetoric of ArgumentAbdelmajid Said100% (9)
- Second-order linear differential equations solutionsDocument11 pagesSecond-order linear differential equations solutionsFlor MartNo ratings yet
- Open Source Used in Cisco Packet Tracer Mobile iOS 2.1Document39 pagesOpen Source Used in Cisco Packet Tracer Mobile iOS 2.1Fernandö AcNo ratings yet
- Defence Studies: PAPER-I: (Evolution of Strategic Thought) Section-A 1. Concept and TheoriesDocument5 pagesDefence Studies: PAPER-I: (Evolution of Strategic Thought) Section-A 1. Concept and TheoriesVirendra PratapNo ratings yet
- Department of Education: Republic of The PhilippinesDocument4 pagesDepartment of Education: Republic of The PhilippinesGraceRasdasNo ratings yet
- ++++jahani, K. Et Al. (2022) Structural Dynamics of Offshore Wind Turbines - A ReviewDocument17 pages++++jahani, K. Et Al. (2022) Structural Dynamics of Offshore Wind Turbines - A ReviewMarcus Girão de MoraisNo ratings yet
- Kayla-Simpson ResumeDocument2 pagesKayla-Simpson Resumeapi-637798058No ratings yet
- Boundary Value Analysis 2Document13 pagesBoundary Value Analysis 2Raheela NasimNo ratings yet
- Exp 5 ProcedureDocument2 pagesExp 5 ProcedureAndreaNo ratings yet
- Trends in NursingDocument25 pagesTrends in NursingMahalakshmiNo ratings yet
- Operating Systems Presentation002. CompleteDocument19 pagesOperating Systems Presentation002. CompleteShamika ThomasNo ratings yet
- RG-6 Coaxial Cable CCS Conductor SpecificationsDocument2 pagesRG-6 Coaxial Cable CCS Conductor SpecificationsShashank SaxenaNo ratings yet
- Introduction To Treatment of Tannery EffluentsDocument69 pagesIntroduction To Treatment of Tannery EffluentsVíctor Villarreal La TorreNo ratings yet
- Denise Riley Preface - ApDocument9 pagesDenise Riley Preface - ApAdam PietteNo ratings yet
- 9th Grade English 1Document20 pages9th Grade English 1api-329789147No ratings yet
- Inches to cm conversion chartDocument1 pageInches to cm conversion chartfrykadelleNo ratings yet
- MIC 7522 Z30GR Data Sheet enUS 88384667787Document12 pagesMIC 7522 Z30GR Data Sheet enUS 88384667787petereriksson.rosenforsNo ratings yet
- AM2 - Tutorial 6Document11 pagesAM2 - Tutorial 6Chinh KiềuNo ratings yet
- Jiyuu No TsubasaDocument58 pagesJiyuu No TsubasaIgor AraújoNo ratings yet
- Lessons From LagaanDocument14 pagesLessons From LagaanNeha MhatreNo ratings yet
- Indigenous Reptilian, UFOs, MARS, Reptoid Predation Found On Mars, Benevolent Hybrid Reptilian HumansDocument554 pagesIndigenous Reptilian, UFOs, MARS, Reptoid Predation Found On Mars, Benevolent Hybrid Reptilian HumansMindSpaceApocalypse100% (4)
- Economic Impact of Toyota Motor Manufacturing, Texas: Jim WisemanDocument12 pagesEconomic Impact of Toyota Motor Manufacturing, Texas: Jim WisemansengsenNo ratings yet
- Dimension Specification: IdentificationDocument5 pagesDimension Specification: IdentificationАлександр ОлейникNo ratings yet
- Field Work No. 3 Laying of A Simple Curve On Uneven Ground Using TheodoliteDocument5 pagesField Work No. 3 Laying of A Simple Curve On Uneven Ground Using TheodoliteEliminated ProNo ratings yet
- Electrical SystemDocument84 pagesElectrical SystemFELIX AGUILARNo ratings yet
- PA 920C Owner's ManualDocument24 pagesPA 920C Owner's ManualFrancisco Molina CardenasNo ratings yet
- AKU B.Tech 5th Sem Result 2021Document1 pageAKU B.Tech 5th Sem Result 2021Affan AkbarNo ratings yet
- Penyelidikan Tindakan ModelDocument10 pagesPenyelidikan Tindakan ModelramachandranipthoNo ratings yet
- Rugged high quality cylindersDocument2 pagesRugged high quality cylindersD Rider CasanovaNo ratings yet