You might also like
- Clivet Carel PcoDocument80 pagesClivet Carel PcoToni Dlabac100% (2)
- Ce Mod1Document22 pagesCe Mod1AYUSH CHANDRANo ratings yet
- Unit I NotesDocument43 pagesUnit I Notesaravinth69601No ratings yet
- Unit No - II: Block Diagram RepresentationDocument56 pagesUnit No - II: Block Diagram RepresentationNamrta DeokateNo ratings yet
- Introduction to Classical Control SystemsDocument30 pagesIntroduction to Classical Control SystemsRajasekhar AtlaNo ratings yet
- IntroductionDocument66 pagesIntroductionvaniNo ratings yet
- Automatic Control: Open Loop Control Systems: A System in Which The Output Has No Effect On The Control Action IsDocument11 pagesAutomatic Control: Open Loop Control Systems: A System in Which The Output Has No Effect On The Control Action IsmjoNo ratings yet
- Linear Control System: Presented by Imran Basha SyedDocument35 pagesLinear Control System: Presented by Imran Basha SyedSyed Imran BashaNo ratings yet
- Introduction to Control Systems - Types, Elements, and RequirementsDocument4 pagesIntroduction to Control Systems - Types, Elements, and Requirementsumar almoqidNo ratings yet
- Control Systems Unit I NotesDocument55 pagesControl Systems Unit I NotesShabbir AliNo ratings yet
- Unit-1 NotesDocument43 pagesUnit-1 NotesMD SHAHRIARMAHMUDNo ratings yet
- Transfer Functions Examples Part 1Document21 pagesTransfer Functions Examples Part 1Gideon Moyo0% (1)
- Definition and Types of Control SystemsDocument6 pagesDefinition and Types of Control SystemsAdonis NicolasNo ratings yet
- CS Lecture Notes Units 1 2 3Document88 pagesCS Lecture Notes Units 1 2 3sushinkNo ratings yet
- NotesDocument72 pagesNotes026Himani GautamNo ratings yet
- Industrial Control Chapter 1Document19 pagesIndustrial Control Chapter 1Qayyum AqasyahNo ratings yet
- Linear Control SystemsDocument21 pagesLinear Control SystemsAbduNo ratings yet
- 2019handout1 Automatic Control SystemsDocument91 pages2019handout1 Automatic Control SystemsMU Len GANo ratings yet
- EIE 412 Note 1Document51 pagesEIE 412 Note 1John DavidNo ratings yet
- Feedback and Control Systems: Engr. Joey P. Sarmiento, PECEDocument160 pagesFeedback and Control Systems: Engr. Joey P. Sarmiento, PECERAINIER RamosNo ratings yet
- Figure 1 Process Under ControlDocument9 pagesFigure 1 Process Under ControlKajalNo ratings yet
- Chap 1Document22 pagesChap 1Marianah MasrieNo ratings yet
- Control System (Closed Loop and Open Loop)Document10 pagesControl System (Closed Loop and Open Loop)Fhyras Ayatullah100% (1)
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- Unit I: Fundamentals of Control System: Lecturer: D. R. PardeshiDocument18 pagesUnit I: Fundamentals of Control System: Lecturer: D. R. PardeshiDnyaneshwar RajputNo ratings yet
- Chapter 1Document29 pagesChapter 1Sanji KarunaNo ratings yet
- Introduction To Control System:: "Plant"-And A Sensor That Measures What The Controlled System IsDocument8 pagesIntroduction To Control System:: "Plant"-And A Sensor That Measures What The Controlled System Isabbasmiry83No ratings yet
- Unit IDocument42 pagesUnit Irajavelan.mNo ratings yet
- LabExercise 9 - Dynamic Systems SimulationDocument16 pagesLabExercise 9 - Dynamic Systems SimulationQueenie Rose PercilNo ratings yet
- Vtusolution.in - Introduction to Control SystemsDocument122 pagesVtusolution.in - Introduction to Control Systemsbujangadp123No ratings yet
- Watt's Speed Governor ForDocument18 pagesWatt's Speed Governor ForMuhammad Tayyab YousafzaiNo ratings yet
- Introduction to Control SystemsDocument6 pagesIntroduction to Control SystemsAhmed SaidNo ratings yet
- Me 2401 Mechatronics Unit 1 NotesDocument60 pagesMe 2401 Mechatronics Unit 1 NotesSivagami PunithavathiNo ratings yet
- Unit IDocument7 pagesUnit IanandhNo ratings yet
- Lab Manual - Control System EngineeringDocument39 pagesLab Manual - Control System Engineeringvineetanishad50% (2)
- Control Systems: Dr. Malaya Kumar Hota (Prof.), SENSE, VIT UniversityDocument23 pagesControl Systems: Dr. Malaya Kumar Hota (Prof.), SENSE, VIT Universityshrey saxenaNo ratings yet
- Question BANKDocument15 pagesQuestion BANKAyush MandhareNo ratings yet
- Chapter 1 - v1sDocument31 pagesChapter 1 - v1sKiet Kuat KongNo ratings yet
- Equipment Manual IntroductionDocument47 pagesEquipment Manual IntroductionAnkit Malhotra100% (2)
- Experiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerDocument16 pagesExperiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerfahadfiazNo ratings yet
- EC2255 Controls Systems 2marks With Answers (Sem4)Document39 pagesEC2255 Controls Systems 2marks With Answers (Sem4)lvrevathiNo ratings yet
- Course Outline: DGU3073 Process Instrumentation & ControlDocument66 pagesCourse Outline: DGU3073 Process Instrumentation & ControlAaron ChinNo ratings yet
- Basics of Control Eng 1Document26 pagesBasics of Control Eng 1Hezron gibronNo ratings yet
- Introduction To Control SystemDocument27 pagesIntroduction To Control SystemBonsa MuletaNo ratings yet
- Tee 422 Lec-1Document51 pagesTee 422 Lec-1REJAY89No ratings yet
- CH4 Control SystemDocument10 pagesCH4 Control SystemMahmoud YasseinNo ratings yet
- Unit 1 - Control System - WWW - Rgpvnotes.inDocument21 pagesUnit 1 - Control System - WWW - Rgpvnotes.inAltmash RazaNo ratings yet
- Unit 1 - Control Systems - www.rgpvnotes.inDocument21 pagesUnit 1 - Control Systems - www.rgpvnotes.inpeacepalharshNo ratings yet
- Feedback and Control System Chapter 1. Introduction To Control SystemDocument9 pagesFeedback and Control System Chapter 1. Introduction To Control SystemJefferson BaptistaNo ratings yet
- Feedback and Control Systems: Rezel A. Sto. Tomas, Ece 1Document10 pagesFeedback and Control Systems: Rezel A. Sto. Tomas, Ece 1kujong agacerNo ratings yet
- Title: Introduction To Control System and Their Real Life Application and ExamplesDocument4 pagesTitle: Introduction To Control System and Their Real Life Application and ExampleskalimullahNo ratings yet
- Introduction PDFDocument7 pagesIntroduction PDFSandeep B RNo ratings yet
- Process Control SystemsDocument6 pagesProcess Control SystemsRae angelo AgonoyNo ratings yet
- Control Systems Two Marks QuestionDocument41 pagesControl Systems Two Marks QuestionSk WajuddinNo ratings yet
- Report SeminarDocument23 pagesReport SeminarpradnyaekadNo ratings yet
- Automation 2 Topic 1: Design A Simple Process Control SystemDocument12 pagesAutomation 2 Topic 1: Design A Simple Process Control SystemChriscarl De LimaNo ratings yet
- Class 2 Classification of Control Systems With ExemplesDocument31 pagesClass 2 Classification of Control Systems With ExemplesAcharya Mascara PlaudoNo ratings yet
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- Velocity and Acceleration DiagramsDocument31 pagesVelocity and Acceleration Diagramsjohn_max03No ratings yet
- BallbotTransition ICRA. 2009Document6 pagesBallbotTransition ICRA. 2009kyaw phone htetNo ratings yet
- Getting Started With Stm32f103c8 With MbedSTLink V PDFDocument6 pagesGetting Started With Stm32f103c8 With MbedSTLink V PDFkyaw phone htetNo ratings yet
- TrigDocument2 pagesTrigkyaw phone htetNo ratings yet
- BallbotDocument10 pagesBallbotkyaw phone htetNo ratings yet
- Isrr 05Document10 pagesIsrr 05kyaw phone htetNo ratings yet
- Arduino L298 Shield SCH PDFDocument1 pageArduino L298 Shield SCH PDFkyaw phone htetNo ratings yet
- Velocity and Acceleration DiagramsDocument31 pagesVelocity and Acceleration Diagramsjohn_max03No ratings yet
- Instantaneous Centre Method for Analyzing MechanismsDocument32 pagesInstantaneous Centre Method for Analyzing Mechanismskyaw phone htetNo ratings yet
- MechAnalyzer V4 UserManualDocument13 pagesMechAnalyzer V4 UserManualMECANISMOS ufbaNo ratings yet
- TrigDocument2 pagesTrigkyaw phone htetNo ratings yet
- Control and Design of Robotic Arm3Document7 pagesControl and Design of Robotic Arm3kyaw phone htetNo ratings yet
- Vol5 Iss17 2363-2374 Design and Implementation A Ball BaDocument12 pagesVol5 Iss17 2363-2374 Design and Implementation A Ball Bakyaw phone htetNo ratings yet
- Kinematic Matlab HelpDocument201 pagesKinematic Matlab Helpkush_mech9657No ratings yet
- MekanDocument5 pagesMekankyaw phone htetNo ratings yet
- Linkage 3.10: User's GuideDocument75 pagesLinkage 3.10: User's Guideluisbmwm6No ratings yet
- GIM Software Tutorial: Kinematic Analysis and Motion SimulationDocument26 pagesGIM Software Tutorial: Kinematic Analysis and Motion Simulationserb cutleyNo ratings yet
- Introduction To MATLAB: Violeta Ivanova, Ph.D. MIT Academic ComputingDocument24 pagesIntroduction To MATLAB: Violeta Ivanova, Ph.D. MIT Academic ComputingvijaybhatnNo ratings yet
- A MATLAB Toolbox For Robotic Manipulators: September 2005Document7 pagesA MATLAB Toolbox For Robotic Manipulators: September 2005kyaw phone htetNo ratings yet
- PMDCMotor Modelingand Parameter Identificationfor Control PurposeDocument6 pagesPMDCMotor Modelingand Parameter Identificationfor Control Purposekyaw phone htetNo ratings yet
- Design Simulation and Fabrication of A 5 Axis Robot ArmDocument160 pagesDesign Simulation and Fabrication of A 5 Axis Robot ArmBruno Roberto BaumgartnerNo ratings yet
- KG English Sai 3Document6 pagesKG English Sai 3kyaw phone htetNo ratings yet
- GIM Software Tutorial: Kinematic Analysis and Motion SimulationDocument26 pagesGIM Software Tutorial: Kinematic Analysis and Motion Simulationserb cutleyNo ratings yet
- MATLAB animatedPlotsTutorialArmin PDFDocument28 pagesMATLAB animatedPlotsTutorialArmin PDFkyaw phone htetNo ratings yet
- Modeling and Controller Designing of Rotary Inverted Pendulum (RIP) - Comparison by Using Various Design MethodsDocument8 pagesModeling and Controller Designing of Rotary Inverted Pendulum (RIP) - Comparison by Using Various Design Methodskyaw phone htetNo ratings yet
- Mathematical Modeling With Matlab Products: © 2011 The Mathworks, IncDocument25 pagesMathematical Modeling With Matlab Products: © 2011 The Mathworks, Inckyaw phone htetNo ratings yet
- MATLAB TutorialDocument33 pagesMATLAB Tutorialkyaw phone htetNo ratings yet
- Detailed Table of ContentsDocument9 pagesDetailed Table of Contentsభుక్య వెంకటేష్No ratings yet
- Uarm Swift ProDocument4 pagesUarm Swift Prokyaw phone htetNo ratings yet
- ControlDocument16 pagesControlkyaw phone htetNo ratings yet
- Engine Construction and OperationDocument31 pagesEngine Construction and OperationRohit NewarNo ratings yet
- Niven, Larry - at The Bottom of A HoleDocument10 pagesNiven, Larry - at The Bottom of A Holehilly8No ratings yet
- Troubleshooting KobelcoDocument10 pagesTroubleshooting KobelcoPaijo100% (24)
- MATE 280 Characterization of Powders and Porous MaterialsDocument65 pagesMATE 280 Characterization of Powders and Porous MaterialsAnissa Adiwena100% (1)
- MSC.1 Circ.1197 Amendments To The Unified Interpretations To Solas Chapters II-1And XII Approved by MSC Circ.1176Document5 pagesMSC.1 Circ.1197 Amendments To The Unified Interpretations To Solas Chapters II-1And XII Approved by MSC Circ.1176youngfpNo ratings yet
- Minerals Engineering: Paul W. Cleary, Matt D. SinnottDocument22 pagesMinerals Engineering: Paul W. Cleary, Matt D. SinnottAlbertoNo ratings yet
- Airframe Fuel SystemDocument30 pagesAirframe Fuel SystemLuis GarciaNo ratings yet
- List of Standards and Guidelines For Drilling, Well Construction & Well OperationsDocument2 pagesList of Standards and Guidelines For Drilling, Well Construction & Well OperationsInternational Association of Oil and Gas Producers100% (1)
- TERAL End SuctionDocument6 pagesTERAL End Suctionmarpaung saberindoNo ratings yet
- ThermodynamicsDocument341 pagesThermodynamicsjonathan2788100% (4)
- AQA QMS Pvt. LTD.: S No Company Name Membership NoDocument11 pagesAQA QMS Pvt. LTD.: S No Company Name Membership NoDevasyrucNo ratings yet
- 01 V5 X Series Engineering Data BookDocument212 pages01 V5 X Series Engineering Data Bookcalvin.bloodaxe4478No ratings yet
- APOLLO Seacock InstallationDocument2 pagesAPOLLO Seacock Installationelsalou391No ratings yet
- Project: Layyah Combined Cycle Power Plant: Sub Station: Equipment: Panel Type Bay Ref: DateDocument3 pagesProject: Layyah Combined Cycle Power Plant: Sub Station: Equipment: Panel Type Bay Ref: DatesamlashNo ratings yet
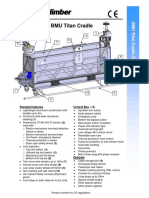
- BMU Titan Cradle: Standard Features Control BoxDocument2 pagesBMU Titan Cradle: Standard Features Control BoxKashyapNo ratings yet
- CFBC Boilers & TG Set Auxillaries SpecificationsDocument18 pagesCFBC Boilers & TG Set Auxillaries SpecificationsJAY PARIKHNo ratings yet
- Ce2039 MSW NotesDocument659 pagesCe2039 MSW NotesMuthu Praveen SarwanNo ratings yet
- FertiOne Manual (30.11.15)Document36 pagesFertiOne Manual (30.11.15)YacineNo ratings yet
- 2006, Piela Et Al, JECS, ImpedanceDocument13 pages2006, Piela Et Al, JECS, ImpedanceKaustubhNo ratings yet
- Plantilla WPS (GMAW-MIG) Junta VDocument1 pagePlantilla WPS (GMAW-MIG) Junta Vjhojan garciaNo ratings yet
- Lorentz Ps ManualDocument72 pagesLorentz Ps ManualJohn KiokoNo ratings yet
- Kings Motorbikes 80cc Bicycle Engine Kit Installation ManualDocument11 pagesKings Motorbikes 80cc Bicycle Engine Kit Installation ManualnwobastardsNo ratings yet
- A4 G970 - G990 Product Brochure enDocument17 pagesA4 G970 - G990 Product Brochure endalibor_bogdan100% (3)
- Cable Installation Manual For Power and Control Cables: Global ReachDocument100 pagesCable Installation Manual For Power and Control Cables: Global Reacharjmandquest100% (1)
- Quiet Ducted Exhaust Ventilation Fans for Homes and Commercial SpacesDocument2 pagesQuiet Ducted Exhaust Ventilation Fans for Homes and Commercial SpacesKyaw ZawNo ratings yet
- EBARA Company ProfileDocument11 pagesEBARA Company ProfileMohamed IbrahimNo ratings yet
- Photoassociation Spectroscopy of A Spin-1 Bose-Einstein CondensateDocument5 pagesPhotoassociation Spectroscopy of A Spin-1 Bose-Einstein Condensatee99930No ratings yet
- Business Graduation ProjectDocument26 pagesBusiness Graduation ProjectSanket ThoratNo ratings yet
- Lista Precios Ahu Mas Accesorios Sinclair 2020Document80 pagesLista Precios Ahu Mas Accesorios Sinclair 2020Jonathan ArboledaNo ratings yet