You might also like
- Shams MaghalatDocument369 pagesShams MaghalatmoabdolyNo ratings yet
- Molavi Dar Erfane IranDocument417 pagesMolavi Dar Erfane Iranhaseeb4evaNo ratings yet
- Advanced ExcelDocument72 pagesAdvanced ExcelSaiful Fx FxNo ratings yet
- Honeywell Sensing I2c Communications Digital Airflow Sensors Technical Note 008210 5 en PDFDocument3 pagesHoneywell Sensing I2c Communications Digital Airflow Sensors Technical Note 008210 5 en PDFmoabdoly100% (1)
- Gate Drive TrafoDocument4 pagesGate Drive Trafobenygiurgiu100% (1)
- Excel Dashboards Tutorial PDFDocument166 pagesExcel Dashboards Tutorial PDFmoabdoly93% (15)
- Advanced ExcelDocument72 pagesAdvanced ExcelSaiful Fx FxNo ratings yet
- Honeywell Sensing Pressure Force Flow Rangeguide 008081 24 EN - Lowres PDFDocument12 pagesHoneywell Sensing Pressure Force Flow Rangeguide 008081 24 EN - Lowres PDFmoabdolyNo ratings yet
- Excel Dax Tutorial PDFDocument23 pagesExcel Dax Tutorial PDFmoabdolyNo ratings yet
- SolidWorks Premium 2013 x64 Edition - (BindingAnchor PDFDocument1 pageSolidWorks Premium 2013 x64 Edition - (BindingAnchor PDFmoabdolyNo ratings yet
- Honeywell Sensing Airflow Sensors Line Guide 008150 7 en PDFDocument6 pagesHoneywell Sensing Airflow Sensors Line Guide 008150 7 en PDFmoabdolyNo ratings yet
- Honeywell Sensing Airflow Awm Series Introduction Catalog PagesDocument1 pageHoneywell Sensing Airflow Awm Series Introduction Catalog PagesmoabdolyNo ratings yet
- CD 00218772Document6 pagesCD 00218772moabdolyNo ratings yet
- General Questions About Gate DriversDocument5 pagesGeneral Questions About Gate DriversmoabdolyNo ratings yet
- IGBT Reverse Conduction Characteristics Hard-Switching and Soft-SwitchingDocument7 pagesIGBT Reverse Conduction Characteristics Hard-Switching and Soft-SwitchingmoabdolyNo ratings yet
- AV02-2483EN DS ACNV4506 31aug2011Document14 pagesAV02-2483EN DS ACNV4506 31aug2011moabdolyNo ratings yet
- Mosfet Gate Driving CircuitDocument37 pagesMosfet Gate Driving Circuitkannanrk1984No ratings yet
- Power Mos 7 Fredfet: APT55M50JFLLDocument5 pagesPower Mos 7 Fredfet: APT55M50JFLLmoabdolyNo ratings yet
- Modern Homework2Document1 pageModern Homework2moabdolyNo ratings yet
- Steval Isv001v1 BomDocument2 pagesSteval Isv001v1 BommoabdolyNo ratings yet
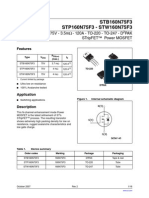
- Stb160N75F3 Stp160N75F3 - Stw160N75F3: N-Channel 75V - 3.5M - 120A - To-220 - To-247 - D Pak Stripfet™ Power MosfetDocument16 pagesStb160N75F3 Stp160N75F3 - Stw160N75F3: N-Channel 75V - 3.5M - 120A - To-220 - To-247 - D Pak Stripfet™ Power MosfetmoabdolyNo ratings yet
- DM 00039831Document12 pagesDM 00039831moabdolyNo ratings yet
- DS FT232HDocument65 pagesDS FT232HmoabdolyNo ratings yet
- Hy1z 12VDocument4 pagesHy1z 12VmoabdolyNo ratings yet
- DS Um232h-BDocument14 pagesDS Um232h-BmoabdolyNo ratings yet
- AB-8-Selection of MOSFETs in Switch ModeDocument4 pagesAB-8-Selection of MOSFETs in Switch ModebmmostefaNo ratings yet
- Linear Switching Regulator FundamentalsDocument29 pagesLinear Switching Regulator FundamentalsbudituxNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- B.E. (Instrumentation Engineering) syllabus structure at University of MumbaiDocument1 pageB.E. (Instrumentation Engineering) syllabus structure at University of MumbaiAmogh ShuklaNo ratings yet
- Kerson Huang - Introduction To Statistical Physics, Second Edition-Chapman and Hall - CRC (2009)Document2 pagesKerson Huang - Introduction To Statistical Physics, Second Edition-Chapman and Hall - CRC (2009)Ana Maria PereiraNo ratings yet
- 10 EMI 09 System StabilityDocument25 pages10 EMI 09 System Stabilityapi-3707706No ratings yet
- 06 - 3 - SPM - Lecture & AssignmentDocument21 pages06 - 3 - SPM - Lecture & AssignmentBrenda CarrascoNo ratings yet
- Dynamic System and Control - Lecture 2Document94 pagesDynamic System and Control - Lecture 2Quoc Chi NguyenNo ratings yet
- ميحرلا نمحرلا الله مسب Advanced Control: Lecture threeDocument13 pagesميحرلا نمحرلا الله مسب Advanced Control: Lecture threealaNo ratings yet
- Design For Six SigmaDocument19 pagesDesign For Six SigmaRenish AeroNo ratings yet
- H-Infinity Methods in Control Theory - Wikipedia PDFDocument3 pagesH-Infinity Methods in Control Theory - Wikipedia PDFRicardo VillalongaNo ratings yet
- Assignment 2Document6 pagesAssignment 2Zeeshan AmjadNo ratings yet
- Lecture 9Document24 pagesLecture 9hiimamanenuNo ratings yet
- BPMN Extension for Security Risk ManagementDocument22 pagesBPMN Extension for Security Risk ManagementMariano SotoNo ratings yet
- PUCIT - Software Engineering - Course OutlineDocument7 pagesPUCIT - Software Engineering - Course Outlineibrahim.samad100% (2)
- Monte Carlo Simulation of 2-D Ising Model Using Wang-Landau MethodDocument4 pagesMonte Carlo Simulation of 2-D Ising Model Using Wang-Landau Methodt_sairamNo ratings yet
- FMECA: Failure Mode and Effect Criticality AnalysisDocument5 pagesFMECA: Failure Mode and Effect Criticality AnalysisGayathri Ragunathan0% (1)
- Fundamentals of Automatic Control For Building SystemsDocument200 pagesFundamentals of Automatic Control For Building SystemstrungNo ratings yet
- Balkan Mine 2015 ProceedingsDocument704 pagesBalkan Mine 2015 ProceedingsDumitru TivigNo ratings yet
- Class 1. Introduction To Data ScienceDocument10 pagesClass 1. Introduction To Data ScienceFelix Gabriel Villamizar CalderinNo ratings yet
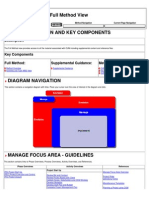
- OUM 6.2 Full Method ViewDocument1,831 pagesOUM 6.2 Full Method Viewsieger7473% (11)
- Clausius inequality and entropy changeDocument8 pagesClausius inequality and entropy changeTadesse AyalewNo ratings yet
- System Testing Types and TechniquesDocument15 pagesSystem Testing Types and TechniquesHajjNo ratings yet
- CMPG312 Full Time Schedule - 2021 - AssignmentsDocument1 pageCMPG312 Full Time Schedule - 2021 - AssignmentsOmega ShuroNo ratings yet
- Assiut University Automatic Control Final Exam QuestionsDocument3 pagesAssiut University Automatic Control Final Exam QuestionsEngAbdallahMohamedNo ratings yet
- Transient Stability Analysis of Multi-Machine SystemDocument38 pagesTransient Stability Analysis of Multi-Machine SystemMd Khalid Akhtar88% (8)
- How To Interchange On Delay Timer and OFF Delay Timer in A PLCDocument8 pagesHow To Interchange On Delay Timer and OFF Delay Timer in A PLCkali bangonNo ratings yet
- Lecture 5Document16 pagesLecture 5Adityan Ilmawan PutraNo ratings yet
- Satdyn MB 2010fDocument50 pagesSatdyn MB 2010faerostarkNo ratings yet
- Building AutomationDocument8 pagesBuilding Automationparish100% (2)
- Optimization PDFDocument59 pagesOptimization PDFtewedajNo ratings yet
- Adaptive Sliding Mode Control With Nonlinear Disturbance Observer For Uncertain Nonlinear System Based On Backstepping MethodDocument6 pagesAdaptive Sliding Mode Control With Nonlinear Disturbance Observer For Uncertain Nonlinear System Based On Backstepping MethodWaj DINo ratings yet
- Bode PlotDocument49 pagesBode PlotKart HikNo ratings yet